前面我们学完相机标定,拿到了相机内参和畸变系数,成功解决了图像畸变问题。
标定的最终目的,就是为了服务今天的核心内容:3D姿态估计。
在机器视觉、AR交互、机械臂抓取、自动驾驶感知、三维测量项目中,有一个核心刚需:
已知物体真实3D坐标,如何通过单张2D图片,算出物体相对相机的位置和旋转角度?
解决这个问题的唯一核心函数,就是 OpenCV 的王牌算法:solvePnP。
如果说相机标定是「矫正图像」,那 solvePnP 就是「读懂空间」。
它是传统视觉2D升3D、单目姿态估计、目标位姿解算的底层基石,所有高精度视觉项目几乎都离不开它。
今天从零带大家吃透 solvePnP:通俗原理、四种求解模式、参数详解、完整可运行代码、迭代优化PnP、工程避坑大全。
一、什么是 PnP / solvePnP?
PnP全称:Perspective-n-Point(透视n点问题)
solvePnP是 OpenCV 中求解 PnP 问题的核心函数。
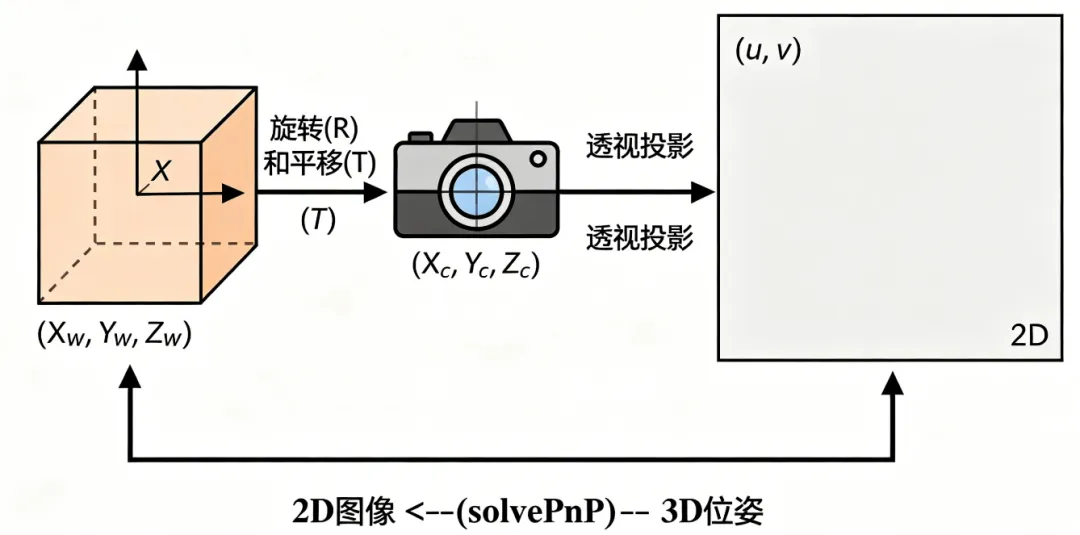
通俗定义:
已知:物体3D真实坐标、图像2D像素坐标、相机内参、畸变系数
求解:物体相对相机的旋转向量、平移向量(位姿)
简单理解:用平面图片,反向推算三维空间位置与姿态。
PnP 核心输入输出
输入(已知条件)
•目标物体3D 世界坐标(真实物理尺寸)
•对应图像上的2D 像素坐标
•相机内参矩阵、畸变系数(来自相机标定)
输出(求解结果)
•rvec:旋转向量(物体相对相机的旋转姿态)
•tvec:平移向量(物体相对相机的XYZ空间位置)
有了 rvec 和 tvec,我们就能精准获取物体:距离、角度、空间位置、偏转姿态。
二、solvePnP 四大求解算法(工程必选)
solvePnP 内置四种核心求解模式,不同场景效果差距极大,新手最容易选错!
1、ITERATIVE(迭代法-默认)
基于高斯牛顿迭代优化,精度稳定,适合匹配点较多、无大量噪声的常规场景,工程默认首选。
2、P3P(三点法)
仅需3对点即可求解,速度极快,适合实时姿态跟踪、高速解算,缺点是噪声敏感。
3、EPnP(高效PnP)
兼顾速度与精度,多点拟合效果优秀,工业高精度场景首选。
4、AP3P(高精度抗干扰)
优化版P3P,抗噪能力更强,适合复杂光照、轻微遮挡场景。
三、solvePnP 与 solvePnPRansac 区别
很多新手分不清这两个函数,这里直接讲透:
•solvePnP:全局所有点参与计算,存在误匹配点直接解算失败
•solvePnPRansac:搭配RANSAC随机采样,自动剔除误匹配外点,工业项目必用
结论:做项目一律用 solvePnPRansac,稳定性碾压原生 solvePnP!
四、完整实战代码:solvePnP 姿态估计
本次实战基于标定好的相机参数 + 自定义3D物体点 + 图像2D点,求解物体位姿,输出旋转、平移参数。
pythonimport cv2import numpy as np# ===================== 1、相机内参(来自相机标定) =====================mtx = np.array([[800, 0, 320],[0, 800, 240],[0, 0, 1]], dtype=np.float32)dist = np.array([[0, 0, 0, 0, 0]], dtype=np.float32)# ===================== 2、定义物体3D真实坐标(单位mm) =====================# 以矩形目标四个角点为例obj_3d = np.array([[0, 0, 0],[100, 0, 0],[100, 100, 0],[0, 100, 0]], dtype=np.float32)# ===================== 3、对应图像2D像素坐标 =====================obj_2d = np.array([[120, 90],[420, 100],[410, 380],[130, 370]], dtype=np.float32)# ===================== 4、PnP姿态求解(RANSAC抗干扰) =====================success, rvec, tvec, inliers = cv2.solvePnPRansac(obj_3d, obj_2d, mtx, dist,flags=cv2.SOLVEPNP_EPNP)print("========== 位姿求解结果 ==========")print("旋转向量 rvec:\n", rvec)print("平移向量 tvec:\n", tvec)print("有效内点索引:\n", inliers)# ===================== 5、向量转换:旋转向量 → 旋转矩阵 =====================rot_mat, _ = cv2.Rodrigues(rvec)print("旋转矩阵:\n", rot_mat)# ===================== 6、计算物体距离相机距离 =====================distance = np.linalg.norm(tvec)print(f"物体距离相机距离:{distance:.2f} mm") |
五、核心函数参数详解
pythoncv2.solvePnPRansac(objectPoints, imagePoints, cameraMatrix, distCoeffs, flags, iterationsCount, reprojectionError) |
•objectPoints:目标三维世界坐标(至少4组点对)
•imagePoints:对应图像二维像素坐标
•cameraMatrix:相机内参矩阵
•distCoeffs:相机畸变系数
•flags:求解算法选型(EPnP/ITERATIVE/P3P)
•reprojectionError:重投影误差阈值,默认8.0
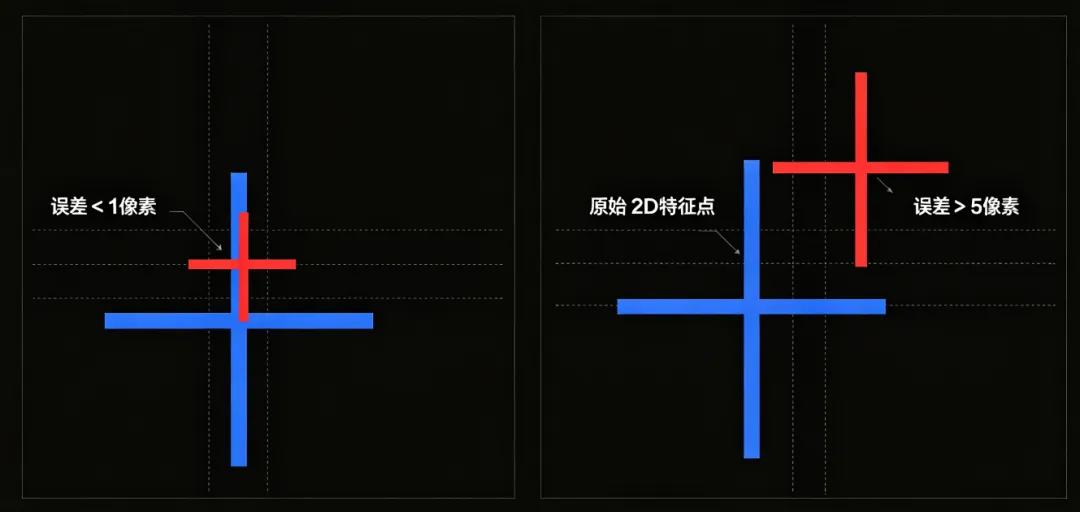
六、PnP 重投影误差(精度判断标准)
做完姿态估计,必须校验精度,核心指标就是重投影误差。
原理:用求解出的位姿,将3D点重新投影回2D图像,对比原始像素位置,误差越小姿态越准。
python# 重投影计算误差projected_2d, _ = cv2.projectPoints(obj_3d, rvec, tvec, mtx, dist)error = cv2.norm(obj_2d, projected_2d.squeeze(), cv2.NORM_L2) / len(projected_2d)print(f"平均重投影误差:{error:.2f} 像素") |
工程标准:误差<1像素,姿态精度极高;1-3像素可用;>5像素结果失效。
七、solvePnP 高频落地场景
•机械臂视觉抓取:求解工件三维位置与偏转角度
•AR增强现实:贴合虚拟物体到真实平面
•单目视觉测距:精准计算目标距离
•无人车姿态感知:路标、参照物位姿解算
•工业对位矫正:物料倾斜、偏移姿态检测
八、新手致命避坑指南(必看)
•坑1:没有相机标定直接用PnP无内参畸变参数,位姿完全不准,属于无效计算
•坑2:3D、2D点顺序不对应点对顺序必须一一对应,顺序错乱直接求解错误
•坑3:只用solvePnP不用RANSAC存在误匹配点时,普通PnP极易求解漂移
•坑4:点对数量过少至少4组点对,点数越多,拟合姿态越精准
•坑5:忽略重投影误差校验不校验误差,无法判断姿态结果是否可用
九、全文总结
solvePnP 是单目视觉三维姿态估计的绝对核心。
如果说相机标定是“修图”,那 solvePnP 就是“看懂空间”。
整套完整工程链路:
相机标定→ 提取2D特征点 → 匹配3D坐标 → solvePnPRansac求解位姿 → 重投影误差校验
吃透这一套,你就掌握了传统单目视觉三维测量、姿态解算的全部核心能力!
❤️ 点赞+在看,后台回复关键词【PnP】,领取完整工程代码+四种算法对比模板+姿态可视化源码!
关注【AI与计算机视觉】,持续更新 OpenCV 高阶三维视觉、工业落地实战干货!
评论区打卡:姿态估计,一起进阶三维机器视觉!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
