本文给出基于MUSIC解算到达角度(DOA),并定位的MATLAB代码,例程使用的二维平面下,两个传感器的测量与定位。附MATLAB源代码,包运行,原创程序,非AI生成,请勿翻卖
文章目录
程序简介
系统介绍
代码实现基于多传感器协同和MUSIC算法的目标定位系统。系统通过多个空间分布的传感器阵列分别估计目标的方向(DOA),然后将这些方向信息融合,利用最小二乘法进行三角定位,最终确定目标在二维平面上的精确位置。
核心算法与公式
导向矢量(Steering Vector):
a(θ)=[1, e^{-j2πd/λ·sinθ},..., e^{-j2π(N-1)d/λ·sinθ}]^T
其中:
协方差矩阵:
R_xx = E{X·X^H} ≈ (X·X^H)/N_snapshots
其中X为接收信号矩阵。
MUSIC谱:
P_MUSIC(θ)=1/[a^H(θ)·(U_n·U_n^H)·a(θ)]
其中U_n为噪声子空间的特征向量矩阵。
线性方程组构建:对于每个传感器s,建立方程:
sin(θ_s)·x - cos(θ_s)·y = x_s·sin(θ_s) - y_s·cos(θ_s)
其中:
(x, y):目标位置(待求)(x_s, y_s):传感器位置θ_s:估计的DOA角度
矩阵形式:
A·p = b
其中:
A = [sin(θ_1), -cos(θ_1); ...; sin(θ_N), -cos(θ_N)]p = [x; y](目标位置)b = [x_1·sin(θ_1)-y_1·cos(θ_1); ...]
最小二乘解:
p_estimated =(A^T·A)^{-1}·A^T·b
代码中使用伪逆求解:pinv(A) * b
关键技术特点
- 多传感器协同:利用多个空间分离的传感器提高定位精度和鲁棒性
- 高分辨率DOA估计:MUSIC算法提供超分辨率的角度估计能力
- 鲁棒定位算法:最小二乘法处理测量误差和系统不一致性
- 全面性能评估:包含误差分析和不同信噪比下的性能测试
运行结果
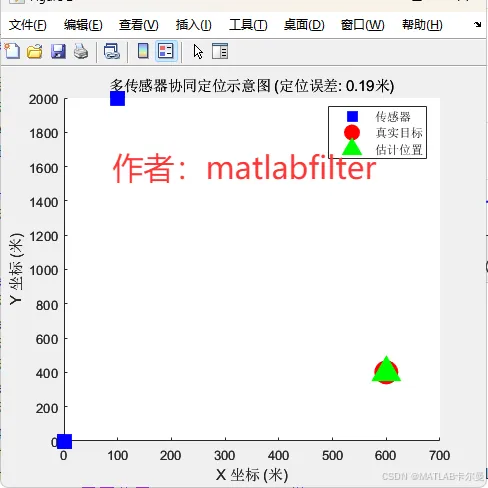
定位示意图:
MUSIC算法估计的角度值与真值对比: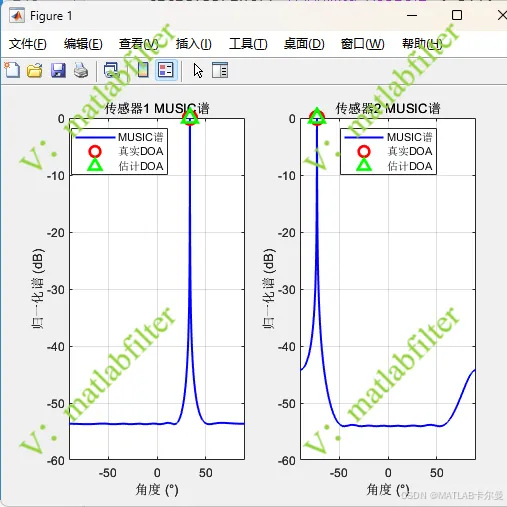
SNR与定位精度的关系曲线(对数显示):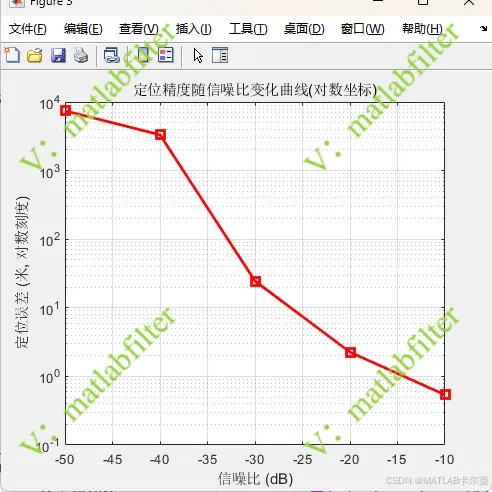
MATLAB源代码
部分代码如下:
%% 多传感器协同DOA技术下的目标定位研究% 功能:使用MUSIC算法进行多传感器协同目标定位% 作者:matlabfilter(V同号,可接代码定制、讲解与调试)% 2026-01-11/Ver1clear; close all; clc;rng(0);%% ========== 系统参数设置 ==========% 信号参数fc =1e9;% 载频,1GHzc =3e8;% 光速lambda = c/fc;% 波长fs =5*fc;% 采样频率T =0.001;% 观测时间t =0:1/fs:T-1/fs;% 时间序列N_snapshots =length(t);% 快拍数% 阵列参数N_elements =8;% 阵元数d = lambda/2;% 阵元间距(半波长)array_pos =(0:N_elements-1)*d;% 阵列位置% 传感器阵列位置(2个测角传感器(锚点))sensor_locations =[0,0;% 传感器1位置 (x,y) 单位:米100,2000];% 目标参数target_pos =[600,400];% 目标真实位置 (x,y)N_targets =1;% 目标数量% 噪声参数SNR_dB =-10;% 信噪比(dB)【如上,噪声大小、各点位置均可修改】
完整代码下载:
如需帮助,或有导航、定位滤波相关的代码定制需求,可联系作者:



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
