吃透CAN协议·搞定设备实操·独立开发上位机·搭建自动化体系,一站式打通车载测试核心竞争力
新能源汽车行业爆发式增长,车载测试岗位已成黄金赛道,但行业内卷也让招聘门槛水涨船高。
是不是经常遇到这些难题?
1)求职跳槽时,车企JD清一色要求「Python开发、CAN总线、上位机开发」,自己却只懂基础测试,简历石沉大海;
2)懂CAN协议理论,却不会用Python实操控制CAN盒,面对真实车载设备无从下手,只能做边缘性工作;
3)会点Python基础,却不知道如何结合车载场景落地,写不出能操控设备、解析数据的实用代码;
4)想摆脱手动测试低效困境,搭建车载自动化测试体系,却没有清晰路径,越学越迷茫;
5)羡慕同事能独立开发车载测试上位机,自己却连GUI界面规划、底层代码联动都摸不着门道。
如果你正被这些问题困扰,那这门「Python结合设备开发车载测试GUI上位机训练营」,就是为你量身打造的刚需实战课——不玩虚的,全程落地实操,手把手带你从0到1掌握车载测试核心技能,学完就能上手做项目、应对面试、提升薪资!
那么操作前,我们必须先了解下什么是CAN总线,以及总线对应的特性,才方便我们后面对它进行代码的操作。CAN(Controller Area Network,控制器局域网)是车载总线的核心协议,也是工业控制领域的主流串行通信协议,其底层设计围绕「高实时性、高可靠性、多主站、低成本」展开,完美适配车载 ECU 多节点通信的需求。
1. CAN 协议的核心特点
1)多主站架构:网络中所有节点地位平等,任意节点均可主动发起通信,无需中心控制器。
2)非破坏性总线仲裁:通过标识符(ID)优先级解决总线冲突,高优先级报文优先发送,且冲突节点不会破坏已发送数据,大幅提升通信效率。
3)高可靠性:支持位错误检测、仲裁场检测、CRC 校验等多种错误检测机制,出错节点可自动退出总线,不影响其他节点通信。
4)实时性强:传输速率最高可达 1Mbps(车载常用 500kbps/250kbps),满足车载实时控制需求。
5)低成本:仅需CAN_H、CAN_L两根差分信号线,硬件成本低
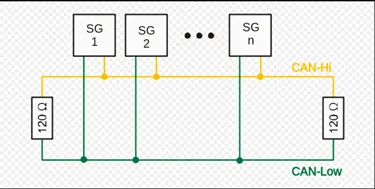
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。
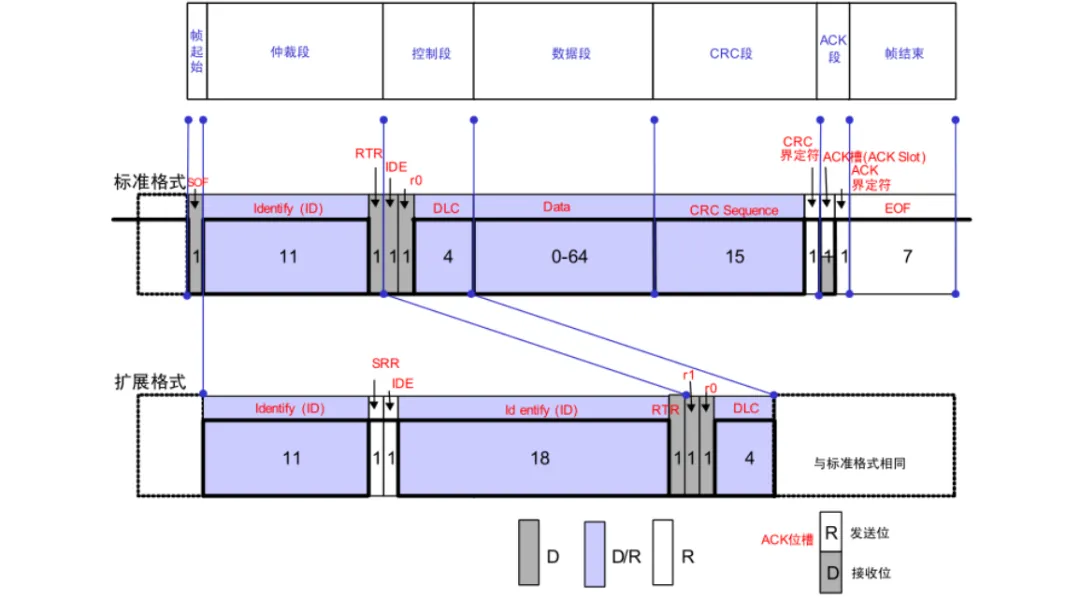
CAN数据帧详解
数据帧由7个段构成,分别是:
1)帧起始(SOF): 表示数据开始的段,0表示数据开发发送
2)仲裁段(ID): 表示该帧优先级的段( CANoe查看),ID越小优先级越高
3)控制段(DLC): 表示数据的字节数(数据长度) (CANoe查看),数值 0~8
4)数据段(DATA]:数据的内容( CANoe查看),可发送 0~8 个字节的数据
5)CRC 段:检查帧的传输错误的段,如果不正确,需要重新传输
6)ACK 段:判断数据是否被正确接收,发送方发出ACK位是1,接收方接收,ACK会0
7)帧结束(EOF):表示数据帧结束的段
2. CAN 协议的关键参数
1. 总线 传输速率 (Bit Rate)
1. 定义:单位时间内总线传输的比特数,决定通信实时性。
2. 车载常用速率:
- 500kbps:车载动力总线(如发动机、变速箱、ABS)的主流速率,实时性要求高。
- 250kbps:车载舒适总线(如车身控制器、空调、车窗)的常用速率。
- 125kbps:低速总线,用于对实时性要求低的场景。
3.计算逻辑:传输速率 = 1 / 位时间,位时间由同步段、传播段、相位缓冲段 1、相位缓冲段 2组成(CAN 控制器的时间片配置)。
2. 标识符(CAN ID)
1. 定义:CAN 帧的唯一标识,也是优先级判断的核心依据,分为标准 ID(11bit) 和扩展 ID(29bit)。
2. 车载核心规则:
- ID 数值越小,优先级越高(0x000 优先级最高)。
- 车载中 CAN ID 与信号一一对应,通过 DBC 文件定义(如 ID=0x18F00400 对应电池 BMS 的电压信号)。
- 同一总线中,CAN ID 不允许重复,否则会导致总线冲突。
3. 数据长度码(DLC)
1. 定义:控制场中的 4bit 字段,取值 0~8,表示数据场的字节数(0=0 字节,8=8 字节)。
2. 车载限制:CAN 数据帧的最大数据长度为 8 字节,若需传输超过 8 字节的数据,需通过帧分片(如 UDS 协议的多帧传输)实现。
4. 总线终端电阻
- 定义:CAN 总线两端的 120Ω 电阻,物理层的核心元件。
-核心作用:
- 消除 CAN_H 和 CAN_L 差分信号的反射,避免信号失真。
- 确保总线空闲时,CAN_H 和 CAN_L 的电压差稳定(隐性状态下电压差约 0V,显性状态下约 2V)。
- 车载测试要点:若终端电阻缺失或阻值异常,会导致总线通信失败,可用万用表测量 CAN_H 和 CAN_L 之间的电阻(正常为 60Ω,两端各 120Ω 并联)。
效果展示:
1. 核心前置认知 & 技术栈选型
1.1 上位机核心功能需求
一套合格的 CAN 盒 GUI 上位机,必须包含以下核心功能,也是本次开发的核心目标,按需增减即可:
- CAN 总线参数可视化配置:波特率、CAN 通道、帧类型(标准帧 2.0A / 扩展帧 2.0B);
- CAN 总线启停控制:一键打开 CAN、一键关闭 CAN;
- CAN 数据发送:自定义帧 ID、自定义发送数据(十六进制)、一键发送;
- CAN 数据接收:实时接收总线上的 CAN 帧,解析后可视化展示(帧 ID、数据内容、帧类型、时间戳、帧长度);
- 数据可视化展示:清晰的收发日志区,支持清屏、自动换行、高亮显示;
- 异常处理:CAN 初始化失败、发送失败、断连等异常弹窗提示,程序不闪退;
- 核心保障:界面操作流畅,不会出现卡死、无响应。
1.2 核心技术栈选型
这是所有 GUI 上位机开发的第一铁律,也是新手最容易踩的坑,违反必卡死,请刻在心里:
1)主线程(UI线程):只负责「界面的绘制、按钮点击、参数读取、控件刷新」,不执行任何耗时操作
2)子线程(工作线程):独立执行「CAN 总线初始化、CAN 数据的持续收发、数据解析」所有耗时 / 阻塞操作
3)线程间通信:只能通过「信号与槽(Signal&Slot)」安全通信,子线程绝对不能直接修改 GUI 界面控件
2. 整体架构设计
采用 三层解耦架构 设计,这是工业级项目的标准设计思路,代码逻辑清晰,后期新增功能(如数据保存、滤波、批量发送)时,无需改动核心代码
第一层:UI 界面层(Pyside6)
- 负责:绘制所有可视化控件、响应用户的按钮点击事件、读取用户配置的参数(波特率、帧 ID 等)、展示 CAN 收发的数据日志、弹窗提示异常信息;
- 无任何 CAN 通信相关代码,纯界面逻辑。
第二层:CAN 通信层(核心封装,独立模块)
- 负责:封装所有 CAN 总线的核心操作 →CAN 初始化、发送单帧数据、持续接收数据、关闭 CAN 总线;
- 两种通信方案均封装为独立的函数 / 类,对外提供统一的调用接口,和UI层完全解耦;
- 所有耗时操作(接收数据)都在这里执行。
第三层:线程调度层( QThread)
- 负责:创建独立的子线程,将「CAN 通信层」的耗时操作丢到子线程中运行;
- 通过 PySide6 的「信号与槽」机制,实现子线程→主线程的数据传递(如接收的 CAN 数据、状态信息)、主线程→子线程的指令传递(如启停 CAN、发送数据指令);
- 核心作用:隔离 UI 和 CAN 通信,保证界面流畅。
3. 完整开发流程 + 可运行完整源码
开发说明
1. 所有代码为完整可运行版本,复制到 Python 文件中直接运行即可,无需删减;
2. 代码包含全部核心功能:参数配置、CAN 启停、数据收发、实时显示、异常处理、界面防卡死;
3. 代码中所有需要根据你的 CAN 盒修改的地方,都用 `【需修改】` 标注,共 2~3 处,零基础也能快速适配;
4. 本次采用 调用DLL库文件的模式,可以适配所有的CAN设备;
5. 硬件前提:CAN 盒已安装官方驱动、硬件接线正确(CAN_H-CAN_H,CAN_L-CAN_L,双向通信需接 120Ω 终端电阻)。
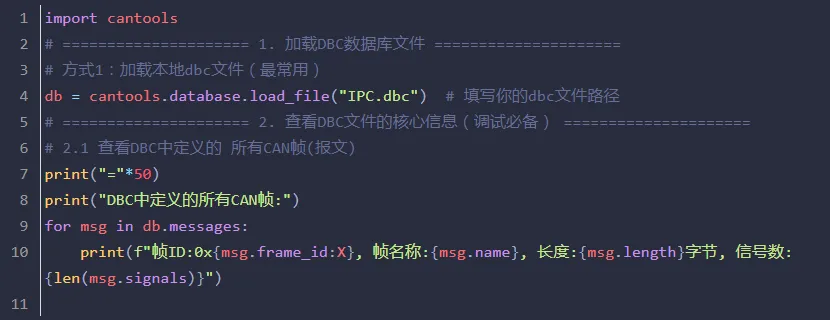
DBC 文件 是CAN 总线的标准数据库文件(CAN Database Format),是 CAN 开发的「数据字典」,本质是一个文本格式的配置文件,定义了 CAN 总线上所有报文 (Frame) 和信号 (Signal) 的解析规则。
Python+`cantools`库解析 CAN 的 DBC 数据库文件 的完整方案,包含DBC 文件基础解析、原始 CAN 帧转物理信号值、物理值编码为 CAN 帧
准备你的`.dbc`数据库文件(比如`IPC.dbc`),放在 Python 脚本同目录下
核心步骤:`加载DBC文件 → 解析数据`
4. 上位机打包exe发布
开发完成后,需要将`.py`源码打包成Windows 可执行文件(exe),无需安装 Python 环境,双击即可运行,步骤如下:
打包命令(终端执行)
命令参数说明
- `-F`:打包成单个独立 exe 文件,方便分发;
- `-w`:隐藏控制台窗口,纯 GUI 运行,美观;
- `-i favicon.ico`:给 exe 文件设置图标(可选,需要提前准备.ico 格式图标);
打包后文件位置
打包完成后,在项目目录下生成`dist`文件夹,里面的`.exe`文件就是最终的上位机程序,直接复制到任意电脑运行即可。
1、车载测试/汽车零部件测试工程师:想进阶自动化测试,提升核心竞争力,突破薪资瓶颈;
2、嵌入式/硬件测试工程师:想转行车载测试赛道,补齐核心技能短板,快速入局黄金行业;
3、应届生/转行人员:想入行车载测试行业,掌握企业刚需技能,增加求职竞争力,轻松拿offer;
4、有Python基础但不会落地车载场景的开发者:想实现技能变现,拓展职业赛道;
5、所有想学习车载自动化测试、独立开发车载上位机的小伙伴。
新能源汽车行业的高速发展,让车载测试成为“香饽饽”岗位,但行业内卷也在筛选真正有能力的人——懂技术、能实操、会开发、做自动化的工程师,才是行业的核心需求。
机会留给有准备的人,现在开始学习,未来的你一定会感谢今天主动进阶的自己!
扫码添加助教微信,发送“训练营”即可锁定名额,参与今晚直播,不见不散哦!








 粉丝专享
粉丝专享