在汽车电子、工业控制等依赖CAN/CAN FD总线的领域,系统开发初期往往缺乏真实硬件环境,直接上车或上产线测试风险高、成本高。周立功ZCANPRO作为专业的总线分析与开发工具,支持Python脚本扩展,可快速搭建CAN总线仿真工程,实现报文收发、节点模拟、场景复现等功能,为总线系统验证、算法调试提供低成本、高效率的解决方案。本文将手把手教你从零搭建仿真工程,覆盖核心逻辑与实战技巧。
CAN总线仿真工程的核心是通过软件模拟真实总线节点行为,无需依赖完整硬件环境即可开展前期开发与测试。基于ZCANPRO+Python的方案,更兼具灵活性与自动化能力,典型应用场景包括:1)总线协议验证:在硬件投产前,仿真ECU、传感器节点,验证CAN报文格式、ID分配、周期收发是否符合规范。2)算法离线调试:针对总线数据处理算法(如故障诊断、数据解析),通过仿真生成自定义报文流,快速定位算法漏洞。3)异常场景复现:模拟总线错误帧、报文丢失、节点离线等异常情况,测试系统容错能力与故障处理逻辑。4)自动化测试集成:将仿真脚本与测试框架结合,实现无人值守的总线系统自动化测试,提升测试覆盖率与一致性。
相较于纯软件仿真工具,ZCANPRO可无缝对接周立功CAN硬件,支持“虚拟仿真→半实物仿真→真实硬件测试”的全流程平滑过渡,复用性极强。
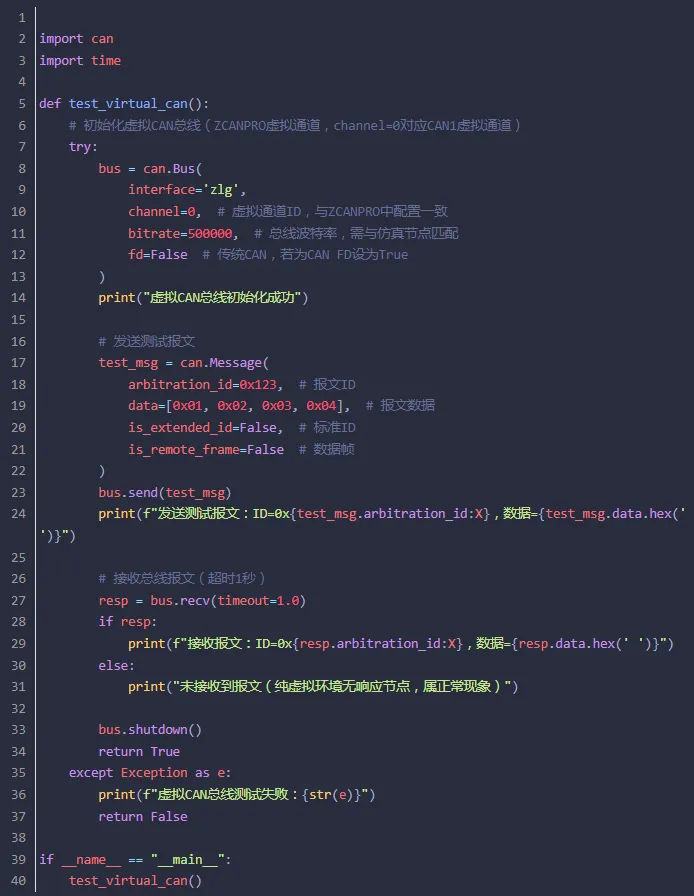
1. 硬件配置(按需选择)仿真工程可分为“纯虚拟仿真”与“半实物仿真”,硬件需求不同:a、纯虚拟仿真:无需额外CAN硬件,依赖ZCANPRO内置虚拟总线,适合前期协议验证与算法调试。b、半实物仿真:需周立功CAN硬件(如USBCAN-2E-U、USBCANFD_300U),一端连接PC,另一端可对接真实节点(如单个ECU),模拟部分节点行为并与真实硬件交互。2. 软件环境搭建a、操作系统:推荐Windows 10/11(ZCANPRO对Windows兼容性最优,虚拟总线功能仅支持Windows)。b、Python版本:Python 3.7~3.9(经实测,该版本区间与ZCANPRO API、python-can库兼容性最佳,高版本可能出现接口调用异常)。c、核心工具与依赖: - ZCANPRO:安装最新版本,自带脚本引擎、虚拟总线与API文档,路径可通过「帮助→脚本开发指南」查看。 - python-can库:用于Python与CAN总线的交互,适配周立功硬件与虚拟总线,安装命令:`pip install python-can==4.2.2`(指定版本避免兼容性问题)。 - 辅助工具:Notepad++(脚本编辑)、Wireshark(可选,总线数据抓包对比)。3. 环境验证搭建完成后,先通过简单脚本验证Python与ZCANPRO的连接及虚拟总线功能:
运行脚本后,打开ZCANPRO,启动对应虚拟通道监听,若能捕获到ID为0x123的报文,说明环境搭建成功。
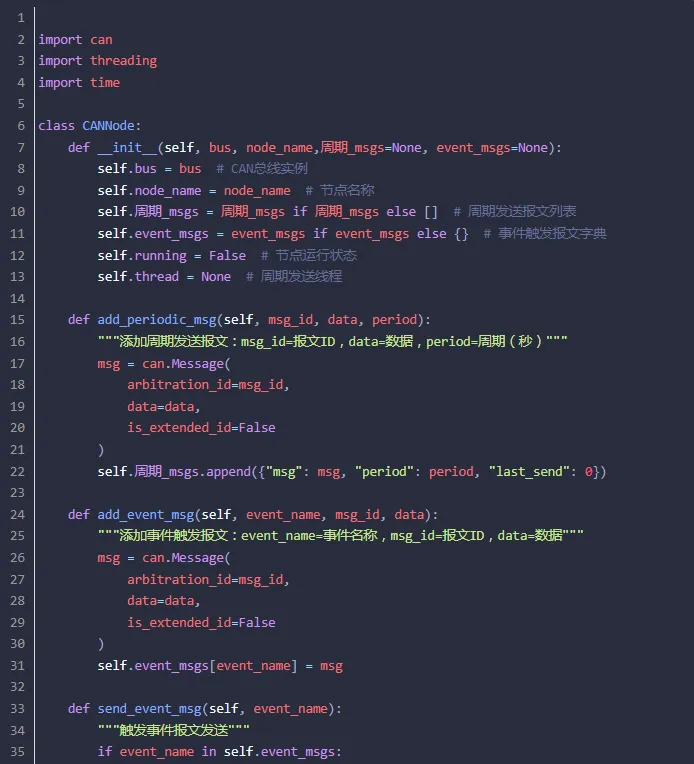
一个完整的CAN总线仿真工程,通常包含“节点模拟”“报文收发调度”“场景控制”三大核心模块。以下基于Python实现通用仿真框架,可根据实际需求扩展。1. 节点模拟模块
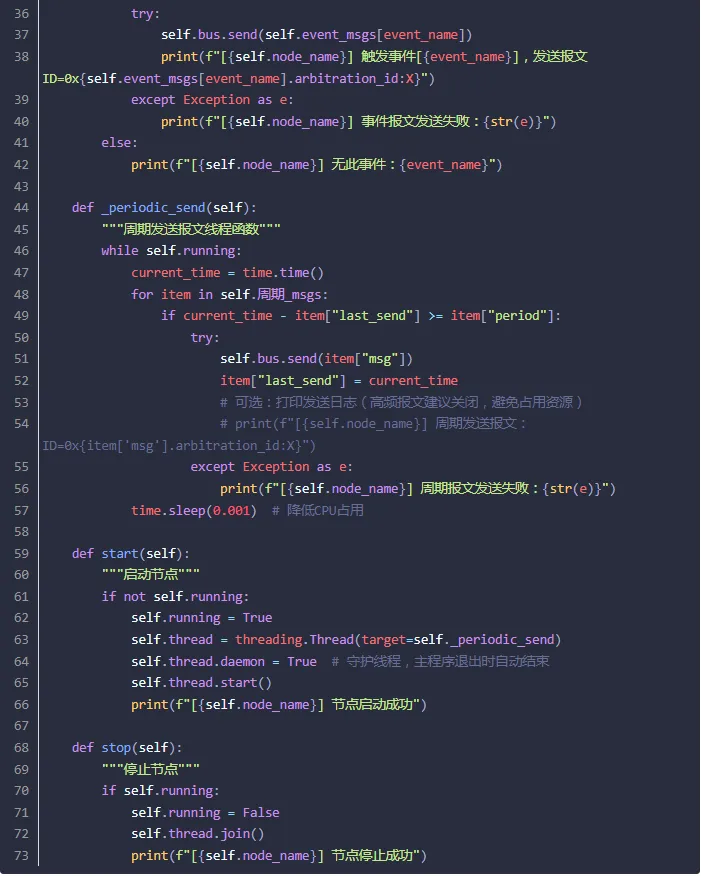
模拟真实ECU、传感器节点,实现周期报文发送、事件触发报文发送等行为。通过类封装节点属性与方法,提升代码复用性。
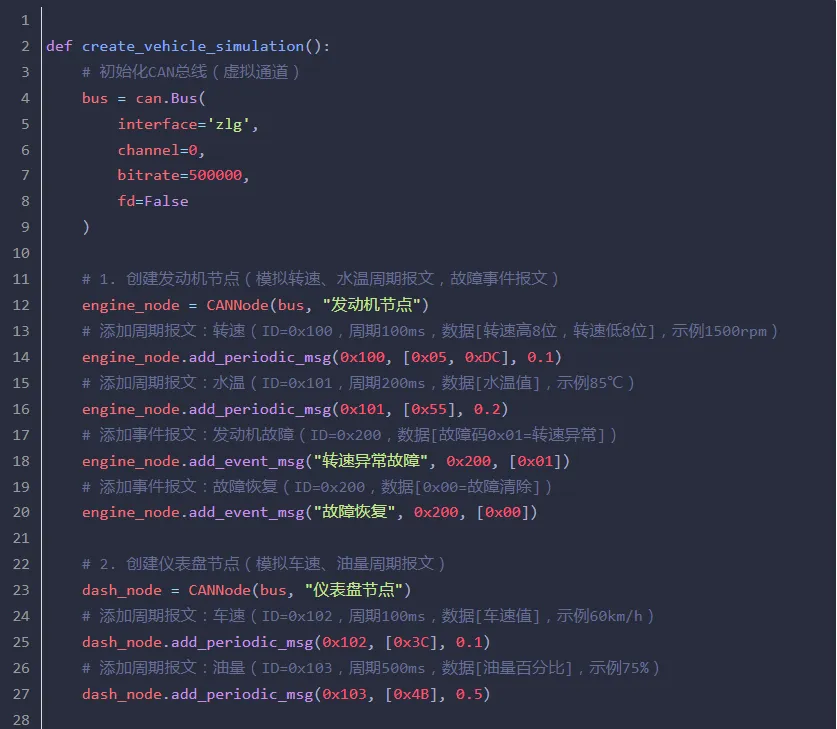
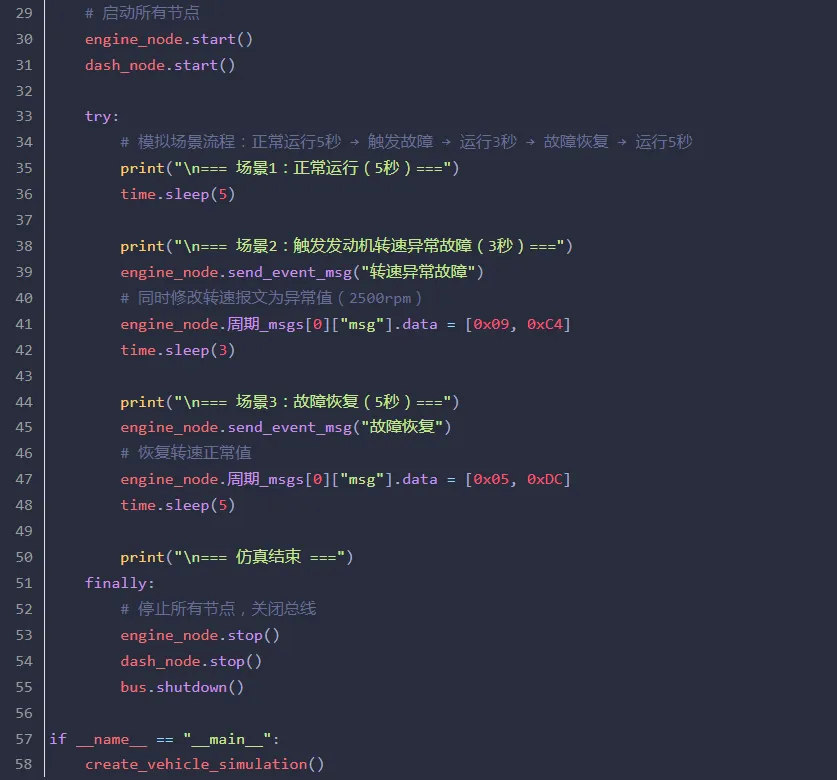
2. 仿真调度与场景控制
通过调度多个节点,实现复杂仿真场景(如正常工作场景、异常故障场景)的切换与控制。以下示例模拟“车载CAN总线”场景,包含发动机节点、仪表盘节点与故障触发逻辑。
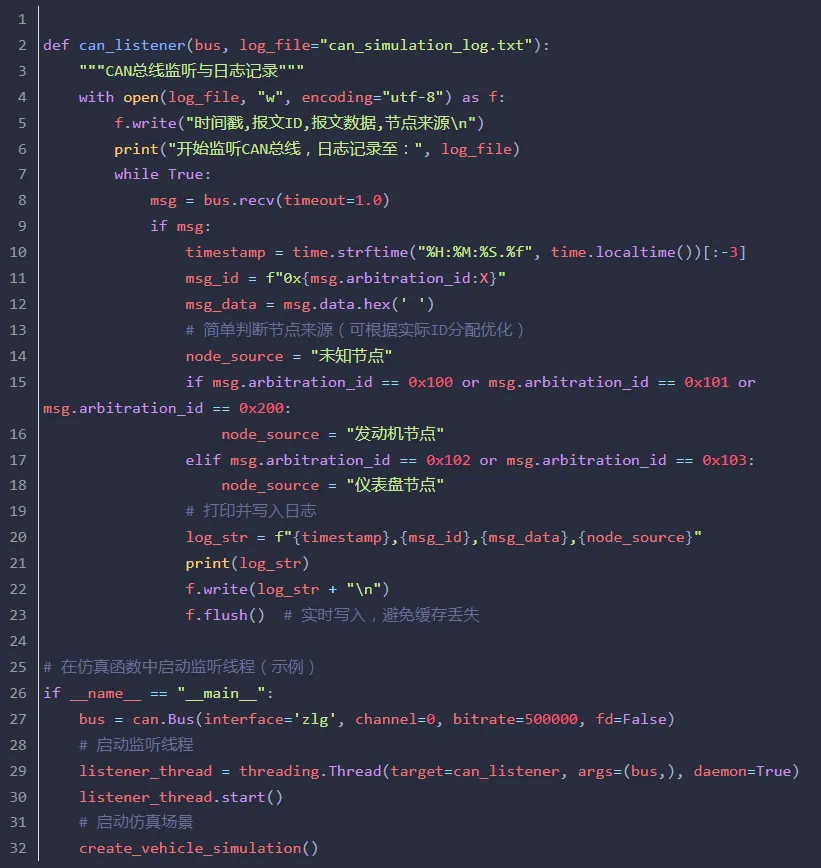
3. 数据监听与日志记录
仿真过程中需监听总线数据,用于验证节点行为与故障排查。可添加独立监听线程,将数据记录至文件或实时打印。
松勤车载测试课程,可以直接扫描下方二维码联系我们咨询哦~




 粉丝专享
粉丝专享






















 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
