工程化实践:构建嵌入式Linux应用开发环境与基础设施
- 2026-06-28 05:49:09
关注+星标公众号,不错过精彩内容
本文将对嵌入式 Linux应用开发环境与基础设施进行系统性介绍。这套工作流笔者已稳定使用数年,经受了多个量产项目的实际检验。
准备工作
Windows下提前安装如下软件:
VMware(在虚拟机中安装ubuntu) 终端工具MobaXterm(用于SSH到ubuntu) Visual Studio(安装Visual Assist插件)
我们日常编码与开发均在Windows环境下完成,仅在需要构建正式版本时,才通过SSH登录ubuntu服务器,通过执行代码库中的构建脚本生成交叉编译后的目标可执行程序。
在此之前我们还需要将代码库所在目录设置为共享文件夹,将其映射到虚拟机 /mnt/hgfs 目录下,然后在Linux命令行下执行:
sudo mount -t fuse.vmhgfs-fuse .host:/ /mnt/hgfs -o allow_other这样就能实现文件双向实时同步。
代码库物理设计
代码库的物理设计决定了团队协作的效率与项目的可维护性。
合理的目录结构应当清晰反映系统架构,同时兼顾构建系统的简洁性。以下是一套经过实践验证的组织方式:
.├── 10-common│ ├── build │ ├── doc│ ├── include│ ├── lib│ └── version├── 20-sdk│ ├── protolib│ ├── dblib│ ├── robotlib│ └── tpslib├── 30-client│ └── teach_pendant├── 40-servers│ ├── servers_robot│ └── servers_rt└── 50-tool ├── build ├── oom_killer ├── pkg_maker ├── protocol_test └── status_code在这里我们的目录以数字为前缀,这种风格的核心优势在于:
直观体现模块关系 数字编码将抽象的架构约束转化为可视化的物理顺序。10-common 前置表明其为全局基础设施,后续模块按数字递增依赖前者,形成清晰的单向依赖链。新成员无需阅读文档,仅通过目录列表即可快速理解系统骨架。
构建编排天然有序 批量处理脚本可按数字glob模式(如 10-*、20-*)串行执行,确保底层库优先编译,上层模块随后链接。这种隐式顺序消除了手动维护构建清单的负担,也避免了循环依赖的引入——若某模块需引用更高序号目录,架构违规一眼可辨。
扩展预留与归类 十位间隔(10、20、30…)为演进保留插槽。新增模块时,可嵌入21、35等空位,无需重命名既有目录即可维持逻辑连续性。同时,数字前缀将功能分类(通用层、客户端、服务端、SDK、工具)与物理排序合二为一,比纯字母命名更具表现力。
工具链友好 文件管理器、终端补全、IDE项目树均按字典序排列,数字前缀确保关键基础设施始终置顶,减少视觉搜索成本。构建日志中的路径也因数字前缀而具备可读的时间线特征,便于快速定位问题模块。
简言之,这是一种将架构意图直接写入文件系统元数据的工程实践,以极低成本换取了团队协作与自动化维护的长期收益。
10-common
此目录为全局基础设施,该目录下的物理结构如下:
.├── build│ └── common.mk├── doc├── include│ ├── boost-1_75│ ├── gtest│ ├── tbox│ └── tftp├── lib│ ├── gtest│ ├── tbox│ │ ├── niic_r000a│ │ └── ubuntu64│ ├── tftp│ │ ├── niic│ │ ├── t113│ │ ├── ubuntu│ │ └── vanxoak│ └── uranus└── version ├── debug └── release几个比较重要的目录如下:
doc:用来存放一些接口文档,设计方案等 include:用来存在公共库的头文件 lib:用来存放公共库文件(同一库下区分不同平台) version:存放构建的版本
20-sdk和40-servers
sdk用来存放封装的动态库的源码,servers用来存放可执行文件的源码。
两者目录结构高度同源,层级组织方式保持一致,以servers_robot为例:
├── include├── prj_linux│ ├── build_ft.sh // 单元测试编译、运行脚本│ ├── cfg // 配置文件│ ├── makefile_necro_release // necro平台makefile脚本│ └── makefile_ubunt64_ft // ft makefile脚本├── prj_win│ ├── servers_robot.sln│ ├── servers_robot.vcxproj│ ├── servers_robot.vcxproj.filters│ └── servers_robot.vcxproj.user ├── source└── test几个比较重要的目录如下:
include:存放内部头文件 prj_linux:Makefile等脚本,被 50-tool/build目录下的构建脚本调用prj_win: visual studio工程,只用来编辑代码 source:程序源文件 test:单元测试代码
30-client
由于项目中涉及到客户端,该目录用来存放客户端源码(基于QT),物理结构如下:
.├── bin├── build_release.sh├── cfg├── CMakeLists.txt├── Makefile├── resources├── src├── teach_pendant.pro├── teach_pendant.pro.user└── temp50-tool
该目录用来存放一些工具和脚本,物理结构如下:
.├── build│ ├── build_pb.sh│ ├── build_pendant.sh│ ├── build_app_ft.sh│ ├── build_app_release.sh│ ├── pkg_pendant│ │ ├── mkpkg.sh│ │ ├── run.sh│ │ └── wd.sh│ └── pkg_app├── cmd_browse│ ├── rlCmdConvert.py│ ├── rlCmd.json│ └── rlCmd.xls├── oom_killer│ └── monitor.sh├── pkg_maker└── status_code ├── logDisplay.json ├── status_code_def.h ├── status_code.py └── status_code.xlsbuild目录下存放的都是脚本文件,用途如下:
版本构建脚本,会调用每个sdk、可执行程序下的构建脚本 软件升级包生成脚本
tool目录下还会放一些开发的小工具,这些工具可以是python脚本,也可以是用shell写的脚本,这里不展开。
代码编辑调试
在Windows平台进行代码编辑与单元测试调试时,通常需要在项目属性中配置以下四个关键编译选项:
| 1. 头文件路径 | ||
| 2. 宏定义 | ||
| 3. 链接库路径 | ||
| 4. 依赖库 |
由于我们是嵌入式开发,会有一部分代码和目标平台相关,而Windows环境必然会缺少对应的库版本支持,可通过从生成中排除特定文件的方式,避免编译错误并保持项目结构的完整性。附示例图:
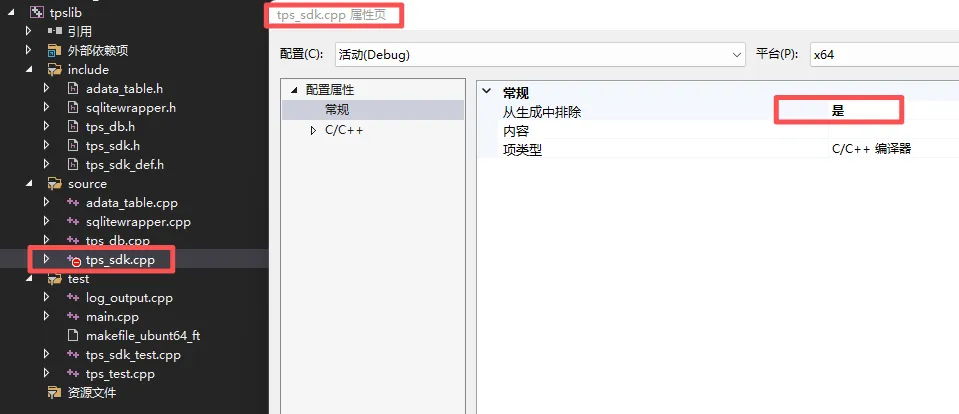
对上面这种情况,我们还可以mock掉平台接口,具体实践可以参考文章经验谈|单元测试常见问题
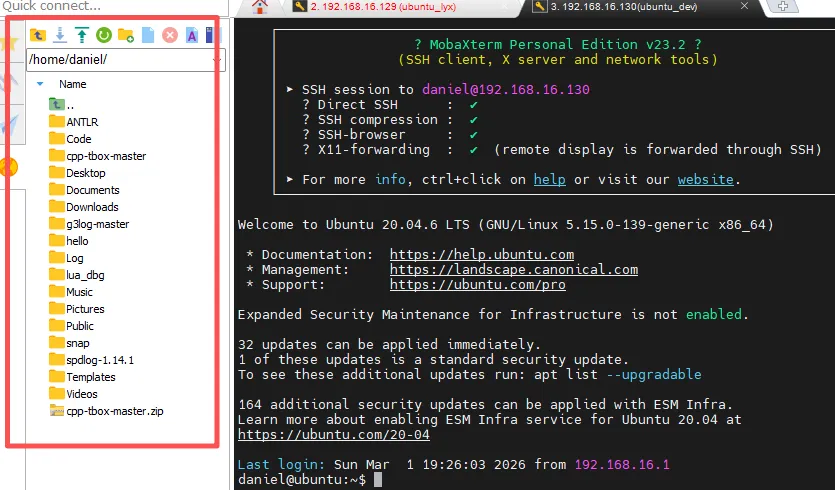
版本上传
一般Linux系统都会自带SSH服务,通过MobaXterm终端工具SSH连接到远程服务器时,左侧会自动弹出 SFTP 文件浏览器,这样就可以把编译好的版本放到目标系统上了。
如果本文对你有启发,恳请各位点击“分享”、“赞”、“在看”!也欢迎转发!
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Linux PCIe P2PDMA 技术介绍
- Linux 7.0-rc2发布引来Linus吐槽:代码量何以如此庞大?
- sed 是 Linux 文本处理的三驾马车之一.
- 这 5 个 Linux 网络监控工具可不得了!用过就丢不掉
- GitHub一巡!传统Linux配置繁琐?Omarchy提供美观现代发行版,让系统使用更高效省心
- Linux 网络核心命令全景指南:从诊断到调优
- Linux后门应急-增加超级用户账号(后门账户排查与权限维持手法全解析)|取证分析
- Linux的日常更新一点也不比Windows少!
- 那些年让Linux内核Panic的空指针引用
- Linux异步AIO深度解析
