在 Linux Camera 子系统中,V4L2 async framework 是构建复杂媒体管线(sensor → CSI → ISP → video node)的关键机制。它的存在并不是为了“优雅”,而是为了解决一个非常现实的问题:
摄像头各组件的 probe 顺序不可控,但它们之间存在明确依赖关系。
本文从设计动机、核心结构、匹配机制、时序流程、多 ISP 扩展到常见陷阱,系统解析 V4L2 async 机制。
一、为什么需要 async?
在典型 SoC Camera 架构中:
Sensor (I2C) ↓CSI Controller (platform) ↓ISP (platform) ↓Video Node (/dev/videoX)
特点:
如果使用传统强依赖方式:
csi_probe() { find_sensor(); if (!sensor) return -EPROBE_DEFER;}
系统会出现:
“Probe defer 风暴”是 Linux 内核驱动开发中的一个专业术语,特指系统启动时,大量设备驱动因依赖资源未就绪而反复触发“延迟探测”,导致启动过程严重延迟甚至卡死的异常状态。
因此引入 async 机制。
二、async 的核心目标
V4L2 async 解决的是:
子设备与 bridge 解耦
允许独立 probe
基于 firmware graph 匹配
延迟 media device 注册
保证 pipeline 完整后再对用户空间可见
换句话说:
async 是一个基于 DT graph 的延迟绑定框架。
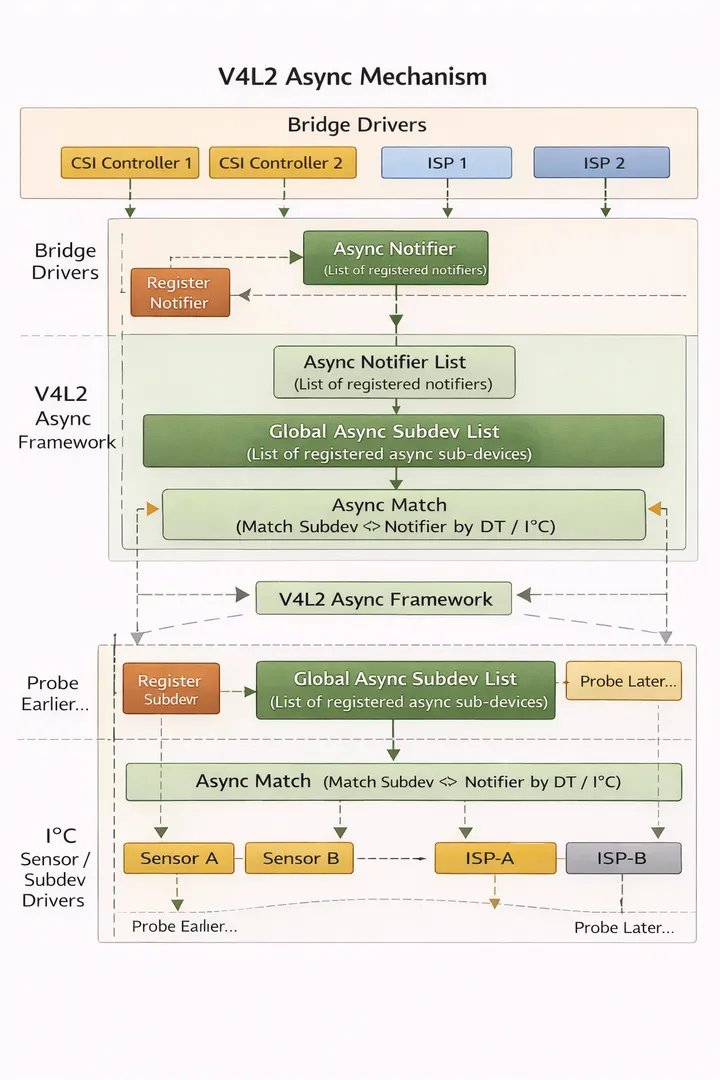
三、核心角色模型
async 架构中有两个角色:
1️. Bridge Driver
通常是:
CSI driver
ISP driver
Camera host driver
职责:
注册 async notifier
声明自己需要哪些 subdev
等待匹配完成
V4L2 async ISP
2️. Sub-device Driver
通常是:
I2C sensor
外部 ISP
HDMI receiver 等
职责:
注册 async subdev
等待 bridge 匹配
V4L2 async ISP subdev
四、核心数据结构
关键结构体:
struct v4l2_async_notifierstruct v4l2_async_connectionstruct v4l2_subdev
内部机制维护:
所有异步注册的摄像头传感器、控制器等子设备。
各个视频设备(如ISP、桥接芯片)对应的通知器。
每个 notifier 包含:
五、匹配依据:Firmware Graph
async 不靠设备名字匹配,而是基于:
Device Tree:基于设备树节点路径或compatible字符串;
fwnode_handle:实现跨平台兼容,一处理DT和ACPI等固件接口;
endpoint / remote-endpoint:基于数据流端点连接关系;
这使得 async 天然支持 graph 结构。
六、完整时序流程
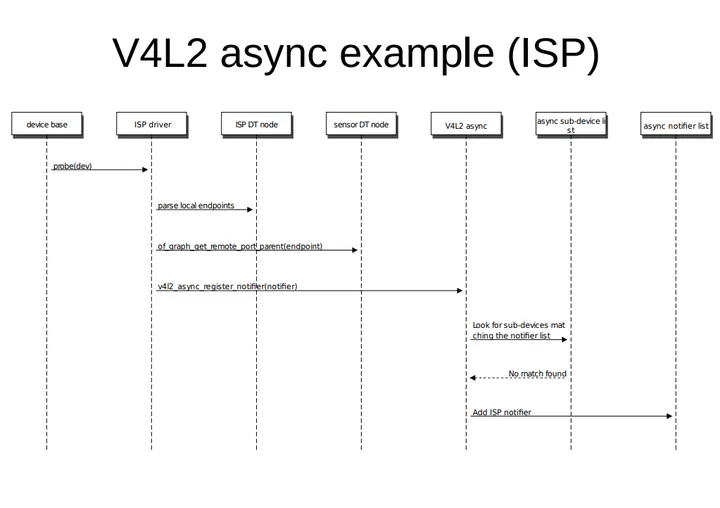
阶段 1:Bridge probe
v4l2_async_notifier_init()v4l2_async_notifier_add_fwnode_remote_subdev()v4l2_async_notifier_register()
此时 bridge 进入等待状态。
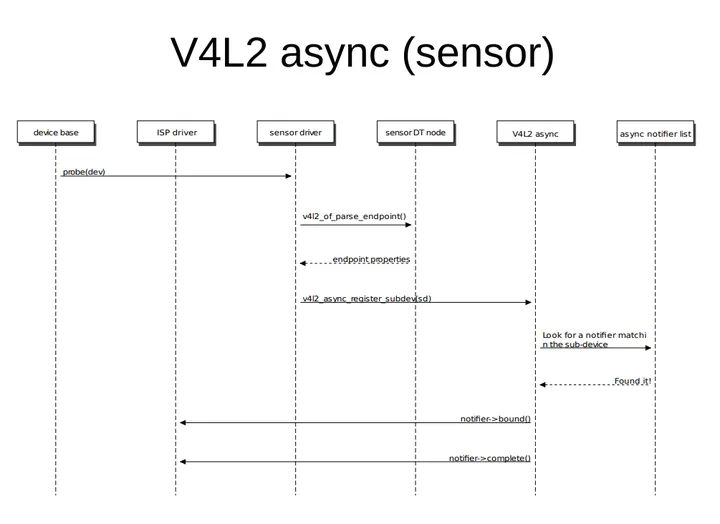
阶段 2:Subdev probe
v4l2_async_register_subdev()
subdev 加入 global async list。
阶段 3:匹配
async 框架自动:
遍历 notifier
根据 fwnode 匹配
调用 notifier->bound()
阶段 4:complete()
当 notifier 的 waiting_list 清空:
通常在这里:
关键点:
/dev/videoX 通常在 complete() 之后才出现。
七、延迟注册的意义
为什么不在 probe 里注册 video node?
因为:
pipeline 未构建完成
entity/link 尚未建立
subdev format 未确定
async 的设计原则:
对用户空间可见的 media device 必须是“完整可用”的。
八、多 ISP / Multi-Sensor 场景
复杂 SoC 可能存在:
Sensor0 → CSI0 → ISP0 Sensor1 → CSI1 → ISP1 Sensor2 → CSI0 → ISP0
此时:
async 允许:
多 notifier 共存
多 pipeline 并行完成
graph 拓扑自然表达
九、常见问题
1️. notifier 永远不 complete
原因:
2️. 双重绑定
一个 subdev 只能属于一个 notifier。
DT graph 必须唯一。
3️. video device 不出现
通常:
十、async 不负责什么?
它不负责:
runtime 路由
buffer 管理
stream 控制
format 协商
power 管理
这些属于:
1.media controller
2. vb2
3. pipeline start/stop
4. pipeline start/stop
5. runtime PM (运行时电源管理)
async 只负责:
设备生命周期同步
十一、机制本质总结
可以用一句话概括:
V4L2 async 是一个基于 firmware graph 的设备级延迟绑定框架,用于在 probe 顺序不确定的情况下构建完整的 media pipeline,并在所有组件就绪后才向用户空间暴露设备节点。
再压缩成三个关键词:
结语
如果把 Camera 子系统比作一条生产线:
async 是确保整条线能够顺利启动的前置条件。
V4L2 async workflow
至此,《车轮上的Linux:揭秘车载Camera驱动开发的核心技术与框架》,都介绍完了。
后续,我们会介绍下《车轮上的Autosar:深度解析车载Camera栈的实现原理与集成》,请持续关注。
车载Camera技术
专业术语解释:
ACPI:Advanced Configuration and Power Interface