Linux Camera驱动调试避坑指南:Sensor黑屏排查完全手册(V4L2+MIPI CSI全流程)
- 2026-07-02 16:48:18
linux Camera无法出图,问题可能出在硬件连接、驱动加载、参数配置、数据传输、图像质量任何一个层面。本文整合多个项目中的实战资源,系统化梳理并配合关键命令和日志分析,让你遇到问题不再迷茫!
一、Camera系统完整数据链路
嵌入式Linux Camera系统的典型架构如下:

各层面对应的排查重点:
| Sensor层 | |||
| I2C控制面 | |||
| MIPI数据面 | |||
| 驱动层 | |||
| Pipeline层 | |||
| 应用层 |
二、常见故障类型总览
Sensor无法出图,问题通常出在以下5个层面:
| 硬件连接层 | ||
| 驱动加载层 | ||
| 参数配置层 | ||
| 数据传输层 | ||
| 图像质量层 |
1.1 分层排查总流程
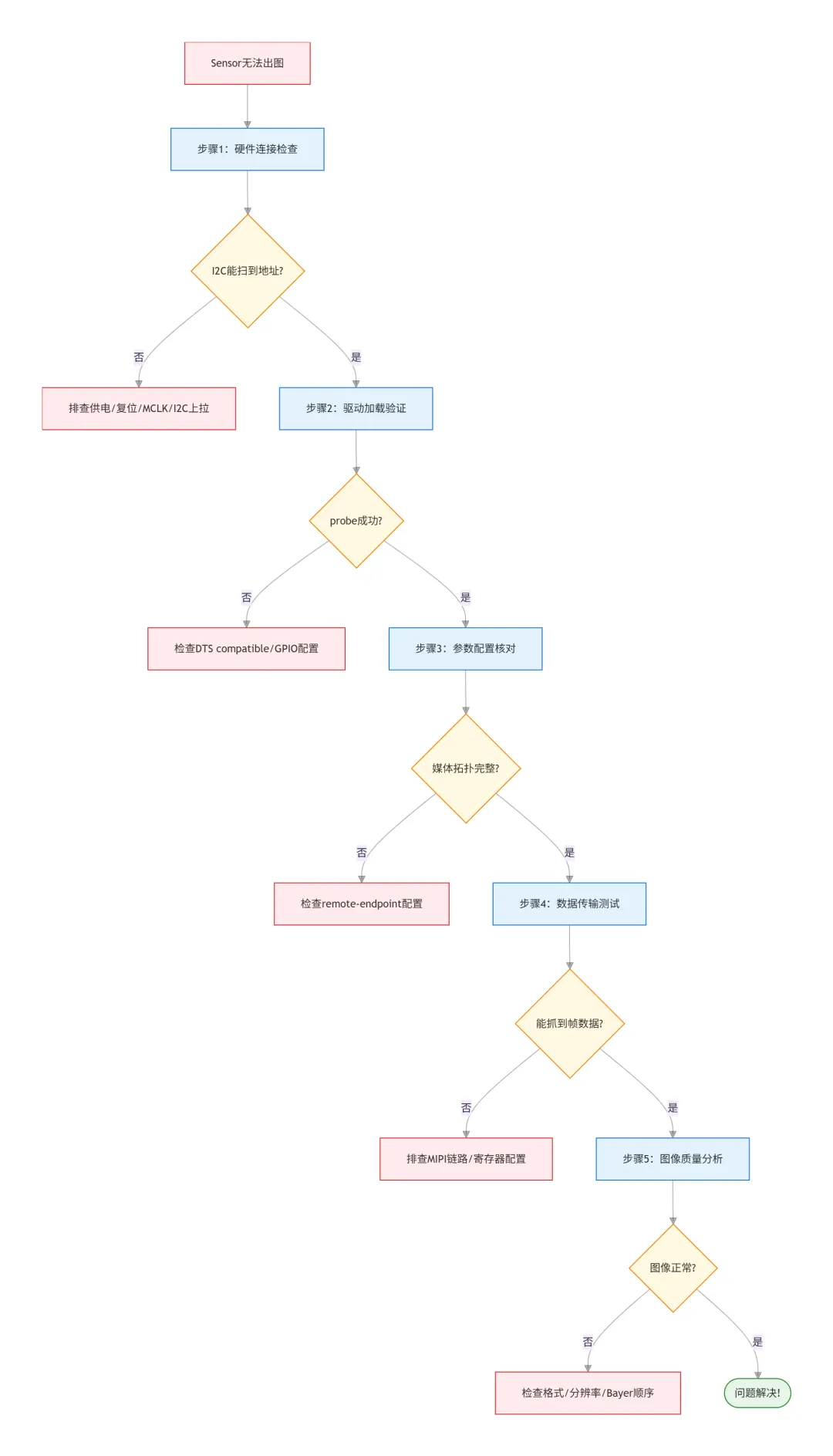
调试心法口诀:先硬件后软件,先简单后复杂,先通信后出图
二、步骤1:硬件连接检查与I2C通信故障排查
一般的平台在开机过程,camera驱动框架都会对sensor进行探测。如果确实存在相应的硬件,将会产生/dev/video节点;如果探测异常,则没有相应的节点。探测过程一般是通过I2C驱动sensor的chipid,在这个过程中遇到最多的就是I2C通信失败。
2.1 硬件检查清单
电源电压正常(AVDD/DVDD/IOVDD) MCLK时钟有输出 RSTN/PWDN引脚电平正确 I2C上拉电阻焊接(4.7KΩ) MIPI排线连接牢固、方向正确
2.2 关键命令操作
# 检查I2C总线i2cdetect -l# 扫描I2C设备(以i2c-1为例)i2cdetect -y 1正常输出示例
0 1 2 3 4 5 6 7 8 9 a b c d e f00: -- -- -- -- -- -- -- -- -- -- -- -- --10: -- -- -- -- -- -- -- -- -- -- UU -- -- -- -- --20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --2.3 I2C通信失败8步排查法
症状:i2cdetect全是"--",找不到Sensor地址
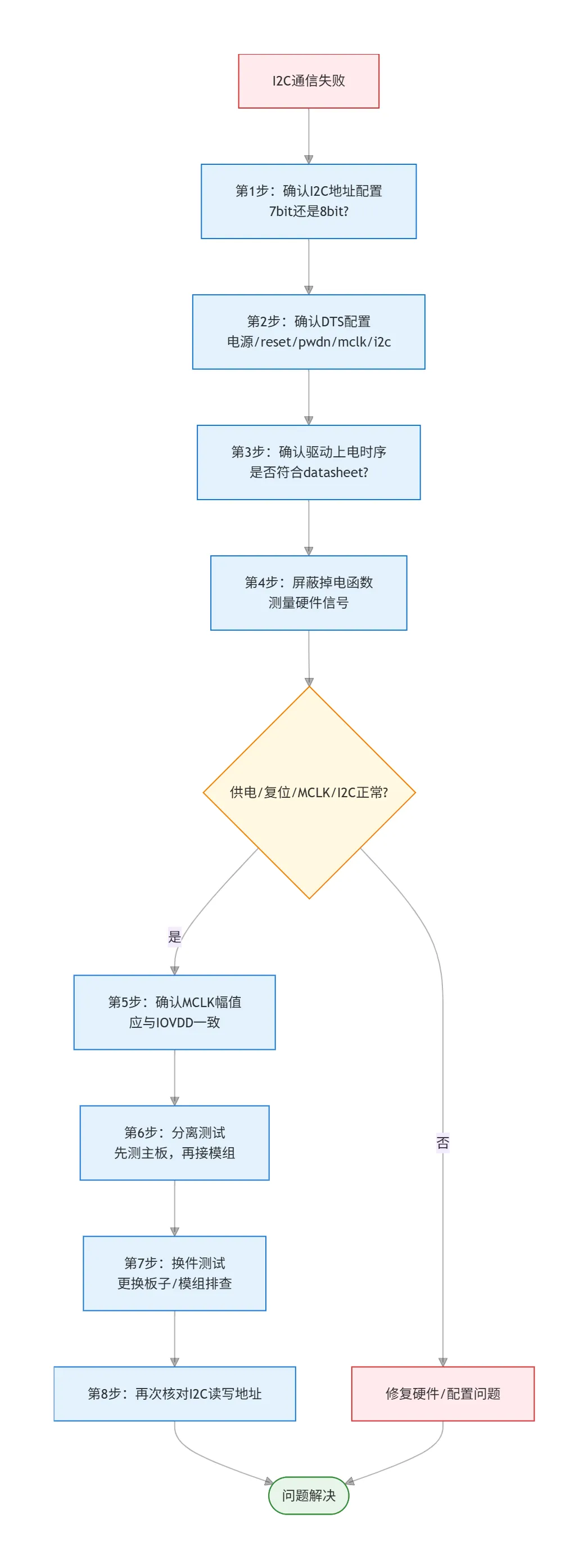
详细步骤说明
| 第1步 | ||
| 第2步 | ||
| 第3步 | ||
| 第4步 | ||
| 第5步 | 特别注意 | |
| 第6步 | ||
| 第7步 | ||
| 第8步 |
调试心法:本来换件测试也可以放到第一步进行的,但是我习惯放到最后,先怀疑自己,再考虑其他~
手动GPIO控制测试
# 如果是GPIO控制问题,手动操作GPIO测试# 以GPIO5为例,设置为输出并拉高echo 5 > /sys/class/gpio/exportecho out > /sys/class/gpio/gpio5/directionecho 1 > /sys/class/gpio/gpio5/value2.4 能扫描到地址但读ID失败
症状:i2cdetect能看到地址,但i2cget读取失败
排查步骤:
检查I2C地址是否左移:部分Sensor地址需要左移一位 确认寄存器地址:查阅规格书,确认芯片ID寄存器地址 检查MCLK质量:用示波器看时钟是否有抖动
验证命令:
# 尝试不同的读取方式i2cget -f -y 1 0x10 0x00 # 8位寄存器i2cget -f -y 1 0x10 0x00 w # 16位寄存器三、步骤2:驱动加载验证
3.1 驱动检查清单
驱动编译成功,生成.ko文件 设备树配置正确 内核日志无报错 设备节点正常生成
3.2 关键命令操作
# 1. 加载驱动insmod ov2640.ko# 2. 查看内核日志dmesg | tail -50# 3. 检查设备节点ls -l /dev/video*ls -l /dev/v4l-subdev*# 4. 查看模块是否加载lsmod | grep ov2640正常日志示例
[ 123.456] ov2640 2-0010: Looking at sensor ID register[ 123.457] ov2640 2-0010: Detected OV2640 sensor[ 123.458] ov2640 2-0010: sensor probed[ 123.459] videodev: Linux video capture interface: v2.003.3 驱动probe失败排查
症状:insmod后内核日志显示probe失败
of_i2c_register_device failed | ||
chip id mismatch | ||
gpio request failed |
排查步骤:
检查compatible属性:设备树中的compatible必须与驱动完全一致 检查I2C通信:确认probe前I2C已经能正常通信 检查GPIO配置:复位、休眠引脚是否正确配置
3.4 无设备节点生成排查
症状:驱动加载成功,但/dev/video*不存在
# 1. 完整查看内核日志dmesg | grep -i -A 5 -B 5 "video\|v4l"# 2. 检查media控制器ls -l /dev/media*# 3. 查看媒体拓扑media-ctl -p -d /dev/media0解决方法:
确认内核已开启 CONFIG_MEDIA_CONTROLLER确认内核已开启 CONFIG_VIDEO_V4L2检查驱动中是否正确调用了 video_register_device
四、步骤3:参数配置核对
4.1 参数检查清单
MIPI data-lanes配置正确 像素格式匹配 分辨率Sensor支持 媒体拓扑链路完整
4.2 关键命令操作
# 1. 查看完整媒体拓扑media-ctl -p -d /dev/media0# 2. 查看Sensor支持的格式v4l2-ctl -d /dev/v4l-subdev0 --list-formats# 3. 查看Sensor支持的分辨率v4l2-ctl -d /dev/v4l-subdev0 --list-framesizes=UYVY# 4. 配置链路和格式media-ctl -v --set-v4l2 '"ov2640 2-0010":0[fmt:UYVY8_2X8/1280x720]'media-ctl -v --links '"ov2640 2-0010":0 -> "mipi-csi2":0[1]'正常拓扑示例
Media controller API version 5.10.0Media device information------------------------driver rkisp1model rkisp1serialbus infohw revision 0x0driver version 5.10.0Device topology- entity 1: m00_b_ov2640 2-0010 (1 pad, 1 link)type V4L2 subdev subtype Sensor flags 0 device node name /dev/v4l-subdev0 pad0: Source [fmt:UYVY8_2X8/1280x720 field:none colorspace:srgb] -> "rkisp1_mipi_mipi_rx0":0 [ENABLED,IMMUTABLE]4.3 媒体拓扑无Sensor节点排查
症状:media-ctl -p看不到Sensor实体
设备树检查要点:
// Sensor端port { sensor_to_csi: endpoint { remote-endpoint = <&csi_to_sensor>; // 必须指向CSI的endpoint data-lanes = <1 2>; };};// CSI端port { csi_to_sensor: endpoint { remote-endpoint = <&sensor_to_csi>; // 必须指回Sensor的endpoint };};排查步骤:
检查设备树remote-endpoint:Sensor和CSI的endpoint必须互指 检查驱动注册:确认驱动调用了 media_entity_pads_init
4.4 格式配置失败排查
症状:media-ctl设置格式时报错
# 1. 先看Sensor支持哪些格式v4l2-ctl -d /dev/v4l-subdev0 --list-formats# 2. 再看支持哪些分辨率v4l2-ctl -d /dev/v4l-subdev0 --list-framesizes=UYVY# 3. 尝试设置一个肯定支持的格式media-ctl -v --set-v4l2 '"ov2640 2-0010":0[fmt:UYVY8_2X8/640x480]'五、步骤4:数据传输测试与MIPI故障排查
当I2C可以正常通信后,意味着SoC可以配置Sensor,使其输出图像数据。这个过程也会经常性地遇到接收不到图像数据的情况。
5.1 数据传输检查清单
链路配置完成 抓帧命令执行成功 抓帧文件大小正常 图像数据有效
5.2 关键命令操作
# 1. 设置视频格式v4l2-ctl -d /dev/video0 --set-fmt-video=width=1280,height=720,pixelformat=UYVY# 2. 查看当前格式v4l2-ctl -d /dev/video0 --get-fmt-video# 3. 尝试流式传输(不保存文件)v4l2-ctl --stream-mmap --stream-count=100# 4. 抓帧保存v4l2-ctl --stream-mmap --stream-count=1 --stream-to=test.yuv# 5. 检查文件大小ls -lh test.yuv正常输出示例
<<<<<<<<<<<<<<<<<<<<<<<< 30.00 fps<<<<<<<<<<<<<<<<<<<<<<<< 30.00 fps<<<<<<<<<<<<<<<<<<<<<<<< 30.00 fps5.3 MIPI没有接收到数据7步排查法
症状:v4l2-ctl执行成功,但test.yuv大小为0,或流式传输没有"<<<"输出
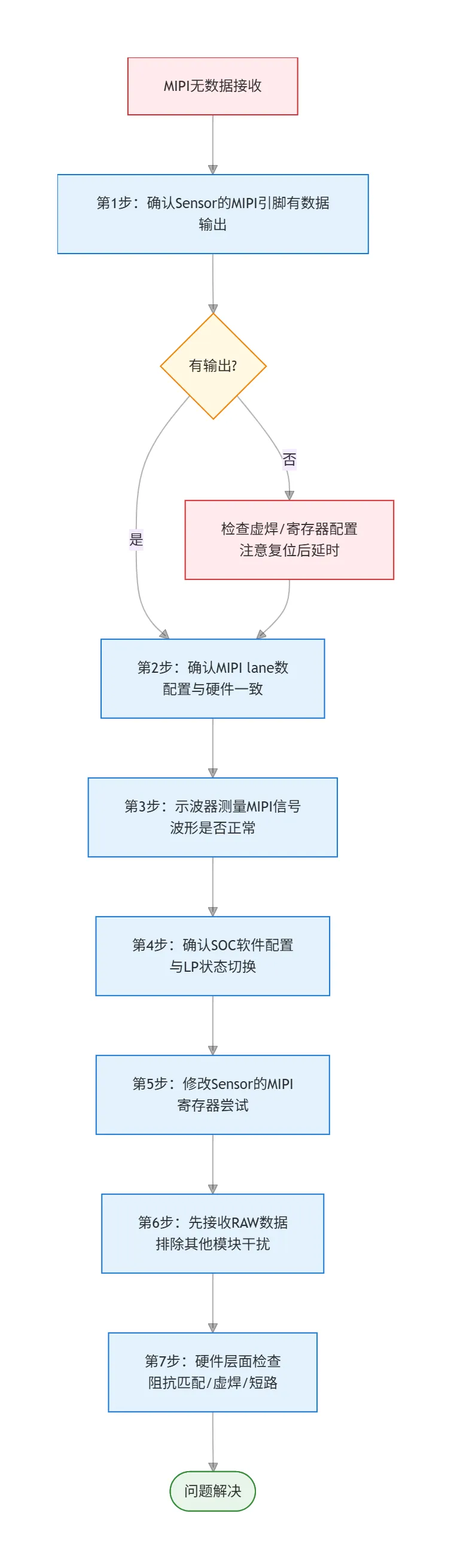
详细步骤说明
| 第1步 | ||
| 第2步 | ||
| 第3步 | ||
| 第4步 | ||
| 第5步 | ||
| 第6步 | ||
| 第7步 |
实战踩坑经验:和模组厂确认提供的寄存器配置是否正确、是否可以正常出图!确认自己测量没有问题之后,要敢猜疑!
关键知识点:LP状态切换
图像数据在SoC MIPI接收过程中需要检测到各个lane的LP11→LP01→LP00→SoT(Start of Transmission)状态切换后才会切换到高速模式准备接收。
常见配置错误:
SoC先使能Sensor输出,再配置SoC MIPI SoC MIPI控制器一直在等待MIPI信号切换,而Sensor早已开始输出
解决方案:将Sensor MIPI clk lane配置为非连续时钟模式,每帧图像数据,MIPI clk lane都会有一个完整的LP状态切换。
5.4 有数据但图像花屏/彩条/分屏/错位排查
症状:抓帧文件大小正常,但图像是花的、有彩条、分屏、显示不完整等
排查思路:
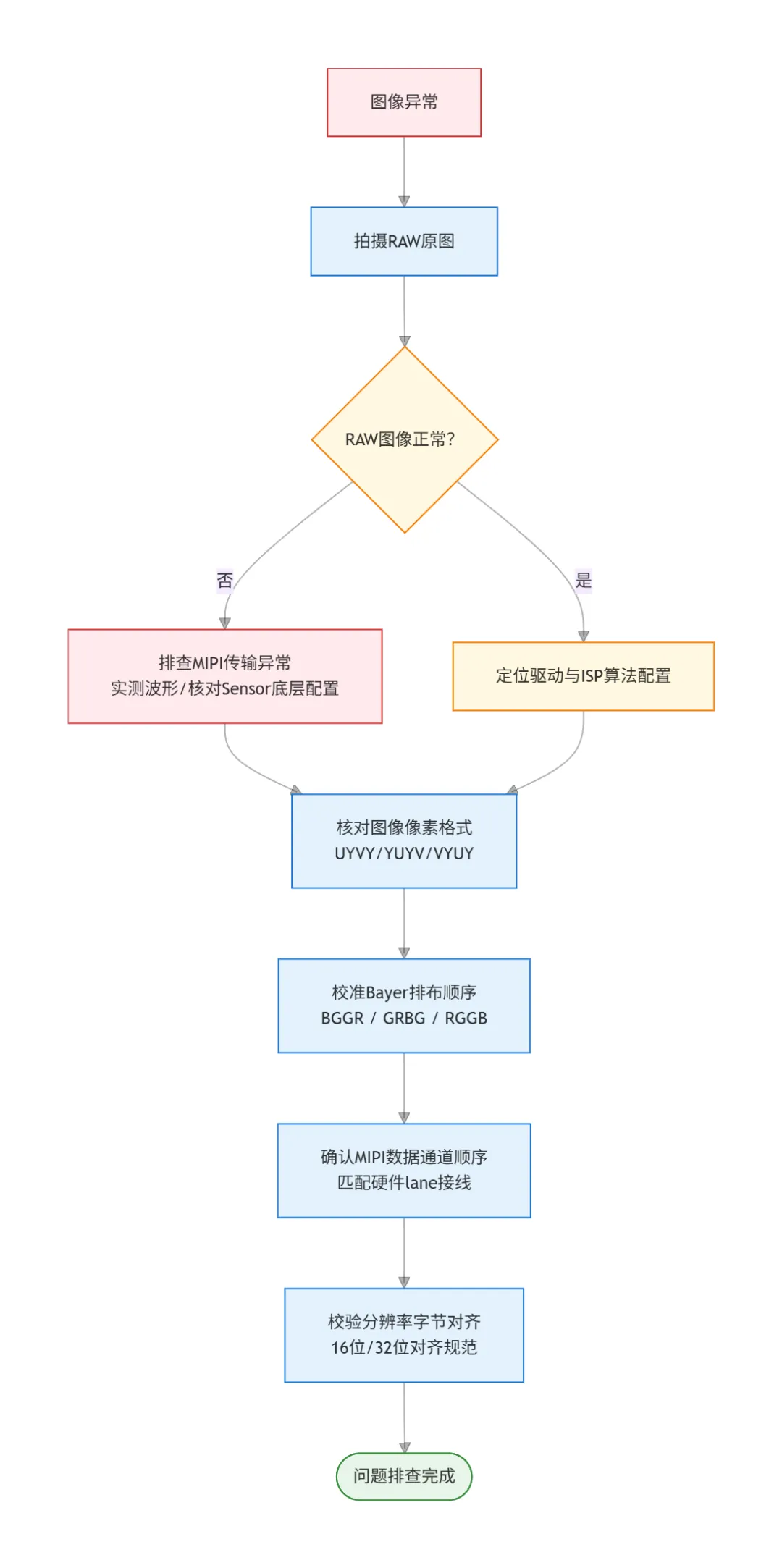
具体排查步骤:
检查像素格式:确认UYVY/YUYV/VYUY顺序正确 检查Bayer顺序:如果是RAW数据,确认BGGR/GRBG等顺序 检查MIPI lane顺序: data-lanes = <1 2>vs<2 1>检查分辨率对齐:部分平台要求宽度16对齐/32对齐
验证方法:
# 尝试不同的像素格式v4l2-ctl --set-fmt-video=pixelformat=YUYVv4l2-ctl --set-fmt-video=pixelformat=VYUY# 尝试不同的分辨率v4l2-ctl --set-fmt-video=width=1920,height=1080v4l2-ctl --set-fmt-video=width=640,height=480六、步骤5:日志深入分析
6.1 关键日志收集命令
# 1. 完整内核日志dmesg > kernel_log.txt# 2. 只看Camera相关dmesg | grep -i "camera\|ov2640\|v4l\|media" > camera_log.txt# 3. 实时监控日志dmesg -w &# 4. 查看系统日志cat /var/log/syslog | grep -i camera6.2 常见错误日志及解决方案
i2c i2c-1: sendbytes: NAK | ||
vb2_v4l2_buffer_done: error | ||
mipi csi2: phy error | ||
isp: frame start timeout |
6.3 高级调试技巧
# 1. 开启驱动调试日志(修改驱动代码)# 在驱动中添加:#define DEBUG#include <linux/printk.h>dev_dbg(&client->dev, "debug message\n");# 2. 查看寄存器值(通过I2C)i2cdump -f -y 1 0x10# 3. 使用ftrace追踪函数调用echo function > /sys/kernel/debug/tracing/current_tracerecho ov2640_* > /sys/kernel/debug/tracing/set_ftrace_filtercat /sys/kernel/debug/tracing/trace七、核心速查表
7.1 I2C通信8步排查法速查
7.2 MIPI接收7步排查法速查
7.3 十大避坑要点
| MIPI排线不要热插拔 | ||
| 上电顺序不能错 | ||
| I2C上拉不能少 | ||
| 设备树compatible要精确 | ||
| GPIO极性要注意 | ||
| data-lanes要数清楚 | ||
| MCLK频率要准确 | ||
| MCLK幅值要检查 | ||
| 像素格式要匹配 | ||
| 日志一定要看 |
八、总结
linux Sensor调试虽然看似复杂,但只要掌握了系统化的排查方法,90%的问题都能快速解决!
核心要点回顾:
分层排查:硬件→驱动→配置→传输→质量 工具善用:i2cdetect、dmesg、media-ctl、v4l2-ctl 日志为王:遇到问题先看日志,答案往往就在里面 耐心细致:每一步都确认正常再往下走,不要跳步 先怀疑自己:先检查自己的配置,再考虑硬件或模组问题

