当代码失误转化为场上的踉跄:清华大学用一场机器人足球赛,回应工程教育的核心痛点
- 2026-06-25 17:40:18

当顶尖高校的实验室里堆满精密图纸和仿真数据,一群学生和他们研发的10台人形机器人,正走上真实绿茵场,迎接碰撞与失衡的终极考验。2025年8月,在首届世界人形机器人运动会中,由清华大学自动化系赵明国研究员指导、成立于2004年的“清华火神队”,在全世界首次5V5机器人足球赛决赛中,以1:0力克德国劲旅,夺得开创性的世界冠军。这是2025年清华大学斩获的一项标志性国际大奖。

比赛过程并非一帆风顺。在完全无人干预的实时对抗中,10台全尺寸机器人的协同是巨大挑战。面对动作迟缓、决策效率低的难题,团队创新地提出了 “视觉-行为端到端”学习算法,让机器人通过视觉信号直接判断是该射门还是带球。队员们甚至为机器人设计了 “脚稍微扭向一边”的特殊步态,极大提升了射门精度。最终,凭借这套更智能、更敏捷的系统,机器人队伍在场上实现了流畅的站位、传球与攻防协同,锁定了胜局。

这场胜利,根植于清华大学作为中国人形机器人关键技术发源地的深厚积淀。队伍使用的机器人,集成了机械系的“超级关节”、计算机系的“灵巧手”与“BCENT认知模型”等跨学科前沿成果。然而,比技术集成更深刻的,是自动化系、机械系、计算机系等多学科学生在极限压力下完成的真实系统淬炼。
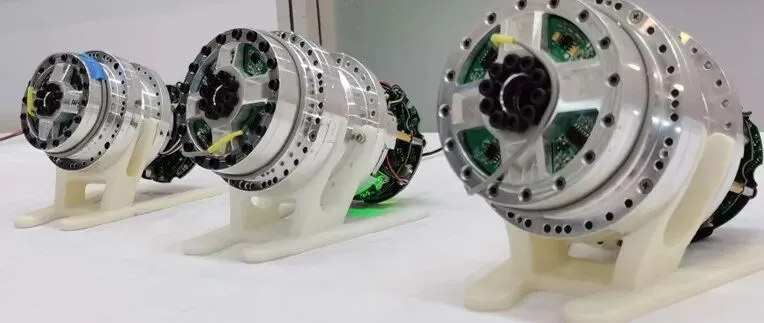
“超级关节”
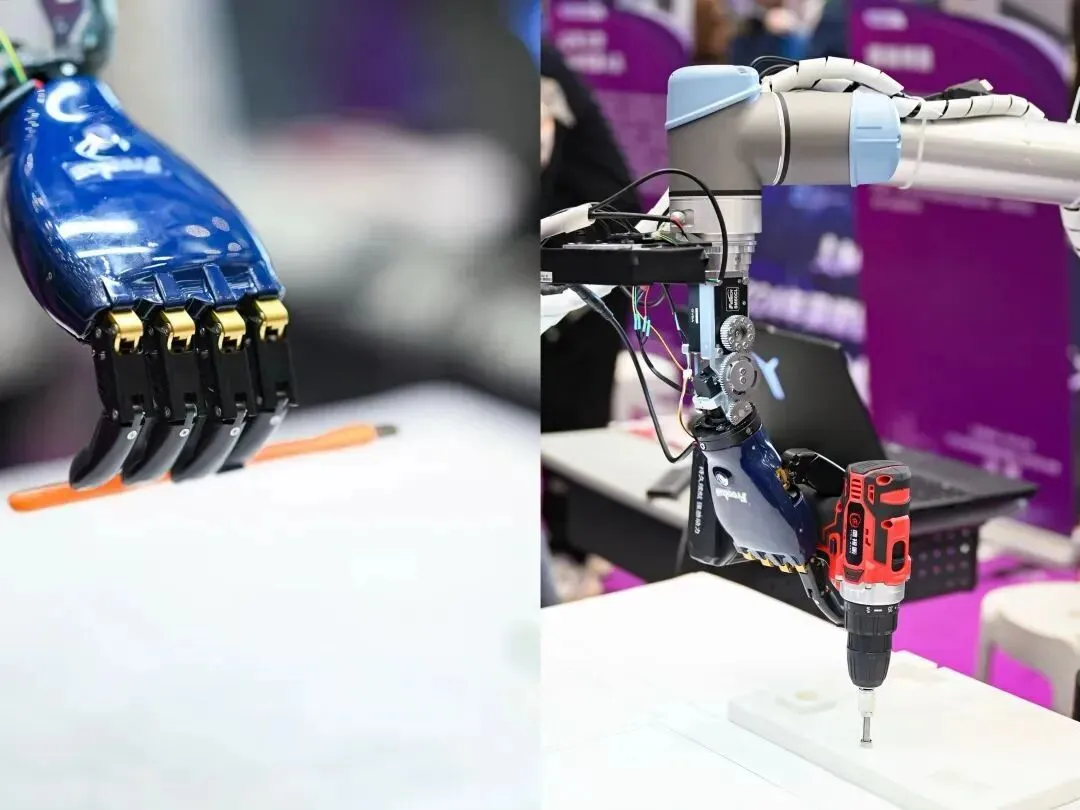
“灵巧手”
这尖锐地指向一个核心教育痛点:我们的工程教育,是否过于沉迷于实验室的“可控仿真”,而疏于让学生在充满不确定性的真实世界中管理故障、权衡取舍、实现协同?清华的答案是:将学生及其造物,推向目标明确、对抗激烈的真实战场。在这里,代码的bug直接转化为场上的失误。这种“实战即学习”的模式,或许正是打破“纸上谈兵”困局,培养能驾驭复杂系统之未来工程师的关键密钥。

在资源有限的情况下,普通高校应如何借鉴这种理念,为学生创造有价值的“实战”机会?欢迎分享你的观点!
来源:清华大学。
本文图文内容已标明来源,其余均源自公开网络资源,若涉及版权问题,请联系我们及时处理。

