ENCY Hyper这是公司用于编程和模拟工业机器人及辅助设备的下一代系统。ENCY Hyper 将离线编程的灵活性与实时方法的响应性相结合,打造了专为平板电脑和工业电脑设计的简化工作流程。
ENCY Hyper 是什么——一览
- 下一代编程与仿真这是一个工业机器人与辅助设备的混合系统,结合离线精准与实时响应,实现触摸优化的工作流程。
- 主要能力实时机器人和传感器反馈;AI驱动的辅助工具;内置碰撞避免功能;机器人单元的完整数字孪生;通过单一接口实现多品牌机器人校准和编程。
- 可以单独使用,也可以和ENCY Robot一起使用ENCY Hyper 可以独立用于拣选、托盘化、包装或组装,也可以与 ENCY Robot 无缝配合,用于铣削、焊接、喷涂或研磨等高级应用。
- 统一、互动的环境系统与机器人实时通信,实现机器人动作的即时执行、测试和调整。控制逻辑和运动可以通过交互式和响应式微调,使集成商和工程师从设计到部署都能完全掌控。
今天坏了什么——以及为什么它会拖慢你的速度
在线(教学吊坠)编程——直观但有限制。它调整快速,且直接在控制器上运行,但无法扩展到复杂路径,依赖操作员的技巧和视觉判断,缺乏全单元模拟,且所有测试都必须在真实单元进行——增加了风险和停机时间。离线(CAM + 模拟)——功能强大,但交接时较脆弱。你可以生成精确路径并在数字孪生中验证,但现实中的细微偏差(安装偏移、夹具磨损、夹具倾斜)会造成模拟与现实之间的差距。即使是简单的在线切换,也会迫使工程师回到办公室,重新生成程序,复制到U盘或网络共享,送给机器人,加载并测试——然后每一个小修正都重复这个循环。为了解决这些问题,ENCY Hyper 将完整的数字孪生和 CAM 级别的准确性与实时机器人通信统一到一个混合、触控优化的环境中——这样你既保留了线下和在线方法的优势,又没有它们的缺点。
ENCY Hyper 如何消除这种权衡
为了解决这些问题,ENCY Hyper 将完整的数字孪生和 CAM 级别的准确性与实时机器人通信统一到一个混合、触控优化的环境中——这样你既保留了线下和在线方法的优势,又没有它们的缺点。
在线(教学吊坠)地址限制
- 按比例调整,不要逐点教学定义该挑选什么、放在哪里;Hyper 实时生成并执行动作,用于日常任务如拣选、托盘整理、包装或组装。
- 行动前先看清楚在获得完整机器人单元模拟的同时,保持在线编辑的响应速度,这样你就不会在生产硬件上“盲测”。
- 调试更安全、更快向控制器发送指令,实时机器人和传感器反馈,立即暂停,然后安全恢复。
修复离线(CAM + 仿真)切换问题
- 消除了办公↔区的循环Hyper 无需导出、复制和来回传递文件,而是直接将程序流传给机器人,以便立即执行并实时调整。
- 缩小了双生与现实之间的差距使用点确认校准:显示几个真实的选点/位置;Hyper 更新数字孪生并自动重新计算其余部分。
- 内置碰撞避免功能当你在单元格上调整时,Hyper会持续检查并生成障碍感知路径,确保编辑安全。
- 多品牌,统一界面通过统一界面校准和编程不同厂商的机器人;添加驱动以扩大覆盖范围,无需重新调整流程。
- 适度的努力,适合快速完成工作。只需小幅修改时,跳过繁重的CAM重建;直接进行即时、实时反馈。
ENCY Hyper的优势——从简单到复杂
ENCY Hyper的混合工作流程涵盖从简单的单元到先进的刀具路径,结合数字孪生的信心与实时单元执行。以下示例仅为说明,而非详尽。
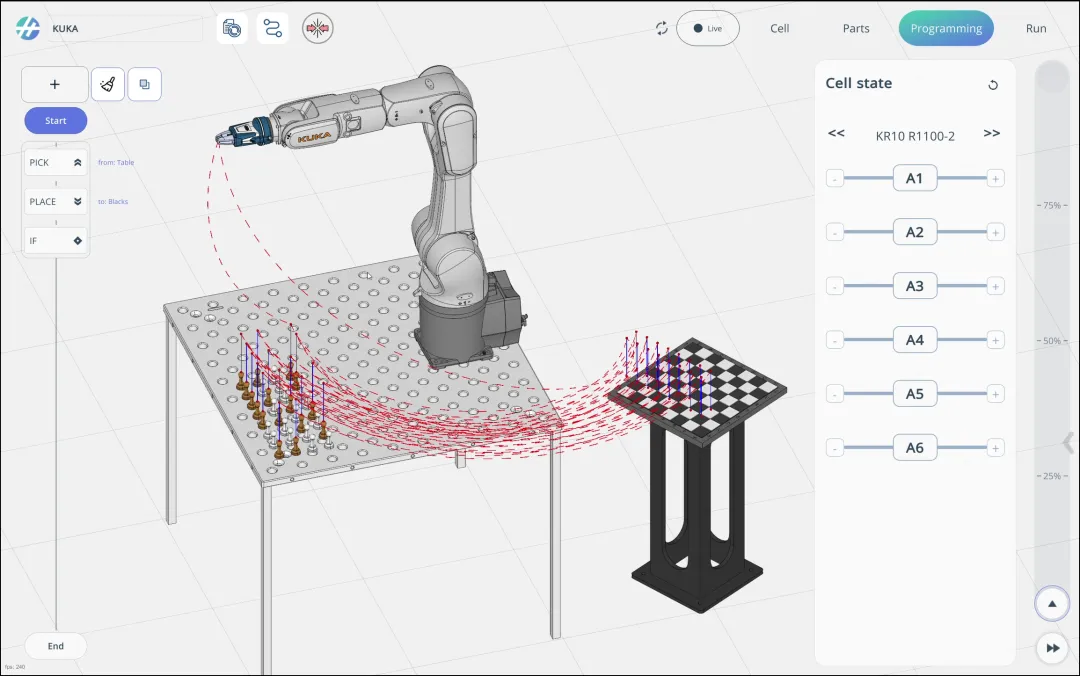
简单运算
- 棕地托盘化使用漂移夹具(第六轴的6轴机器人,托盘化/去托盘化)——将程序流传到控制器,调整单元层模式,并快速重新校准几个真实的拣选/放置点的偏移;碰撞检查有助于保持岗哨和警卫附近的安全距离。
- 套装与轻度螺丝驱动(协作六轴协同机器人,组装/螺丝驱动)——在平板上轻推目标,实时直播更新动作;输入输出反馈确认每一步,无需逐点重教。
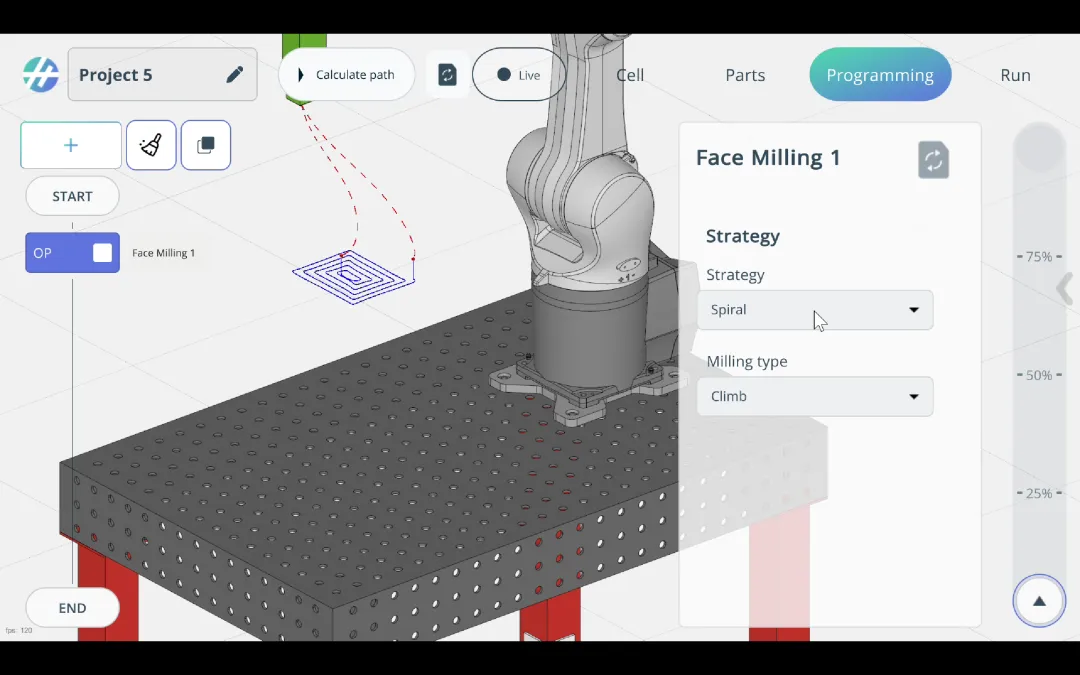
高级作(使用ENCY机器人)
你能在ENCY Robot里编程的所有内容,都可以用ENCY Hyper运行。优势在于你在哪里做更改:在机器人现场,无需往返办公室。操作员和工程师可以在Hyper中交互式调整零件位置、进出、批次大小、托盘/箱子目的地、步长和通行次数。如果你需要处理不同的零件,可以在 ENCY Robot 中更新 CAM 项目;对于同一零件的日常生产变更,你用Hyper。
- 机器人铣削(6轴机器人,可选线性第七轴;主轴)——程序在ENCY Robot中生成,并在Hyper中地面调校(进近/退出编辑、送料、局部调整)。
- 研磨/抛光/去毛刺(六轴机器人;磨料/精加工工具)——在ENCY机器人中生成刀具路径;在Hyper中,可以交互式地调整过路次数、步长以及机器人旁边的进出动作。
- 涂装/喷漆(6轴机器人+旋转台)——使用ENCY机器人进行路径定义;在Hyper中,细化过程参数,如通过次数和单元的启动/停止时序。
- 电弧焊(6轴机器人+2轴定位器;GMAW/TIG中——在ENCY机器人中定义和模拟;在单元,Hyper允许你调整焊接参数,如织造步距、穿缝长度和策略,而无需重建CAM项目。
通过消除快速但风险较高的在线调整与精准但脆弱的离线工作流程之间的错误选择,ENCY Hyper加快了调试速度,提升了短周期和换线的灵活性,并减少了停机时间。它对制造和机器人工程师尤其有价值(从设计到部署一个环境,且最后一公里修正简单)、车间操作员和技术人员(安全、引导式单元编辑且无点教学)、系统集成商(FAT/SAT周期更短,站点回访更少)、OEM/机械制造者(多品牌统一工作流程和更简单的现场更新)。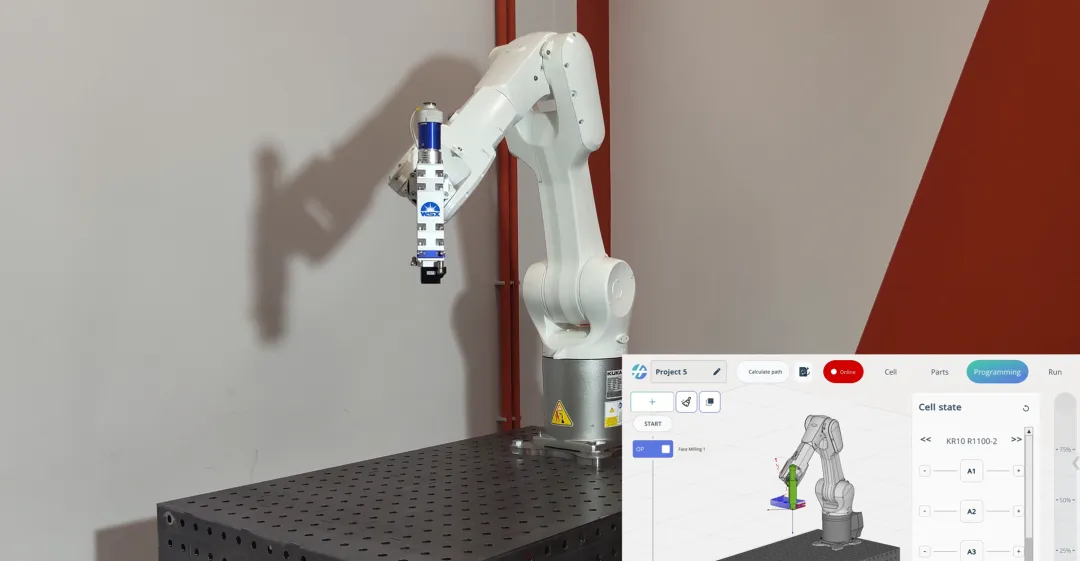



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
