软生物组织在大变形条件下通常表现出显著的非线性与各向异性力学特性,并且在实际服役过程中往往承受单轴、双轴及剪切等多种复杂载荷。然而,现有仿生材料与结构设计大多仅能在单一加载模式下进行力学匹配,难以在多载荷工况下保持一致的力学响应。
针对这一问题,本文提出了一类仿生软各向异性超材料(Bionic Soft Anisotropic Metamaterials, BSAMs)。该结构通过将准各向同性基体结构与定向增强纤维结构相结合,在应变能层面实现了与软生物组织相一致的力学响应,从而摆脱了对特定加载模式的依赖。结合有限元模拟、实验测试以及神经网络辅助的反向设计方法,BSAMs 成功复现了从肾脏(kPa 量级)到皮肤(MPa 量级)等多种软组织在不同加载工况下的非线性和各向异性力学行为。
此外,BSAMs 还支持区域化与梯度化结构设计,可用于模拟器官尺度上的力学性能分布以及软—硬组织界面处的连续力学过渡。该研究为仿生材料、软体机器人、假肢及生物—器件融合等领域提供了一种具有高度通用性的结构设计平台。
(1)仿生软各向异性超材料的设计思想
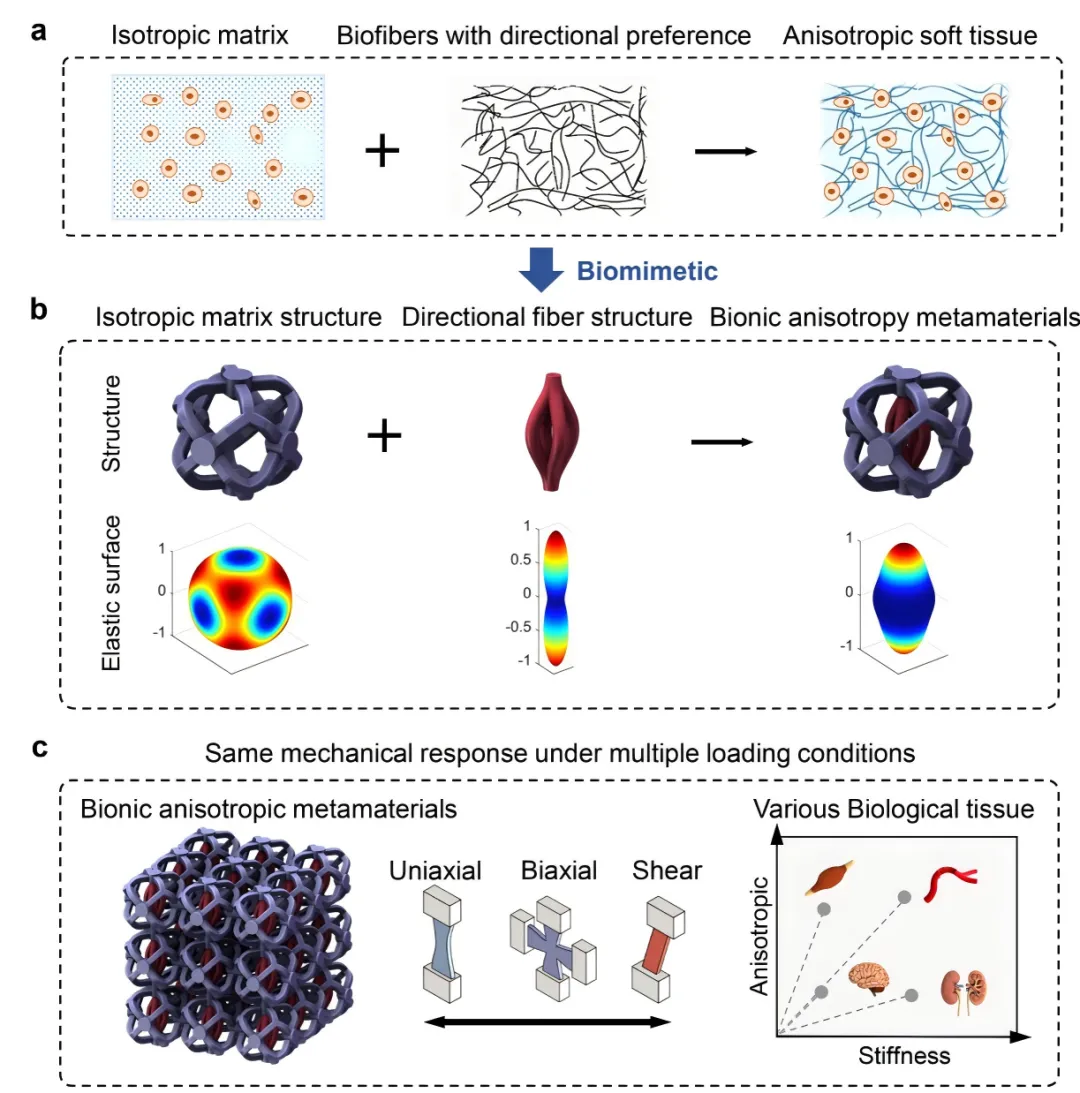
天然软组织的各向异性力学行为主要来源于两部分:一是提供基础柔顺性的各向同性基质网络,二是沿特定方向分布的纤维增强结构。在连续体本构模型中,这种机制通常通过各向同性应变能项与各向异性应变能项的叠加来描述。受此启发,本文提出的 BSAMs 在结构层面直接对应上述力学分解思想,准各向同性基体结构用于模拟软组织的“基质响应”;定向增强结构用于引入类似胶原纤维的方向性刚度。
该仿生设计理念如图1所示,使得 BSAMs 不仅在单轴拉伸下与生物组织相似,更能在双轴拉伸与剪切加载等复杂工况下保持一致的力学响应。(见图1)
图1仿生软各向异性超材料(BSAMs)的设计概念示意图。(a) 生物软组织中各向异性微结构示意,其复杂的纤维取向导致非线性、方向相关的力学响应;(b) BSAMs 的仿生设计思想,将准各向同性基体结构与定向纤维状增强结构相结合;(c) BSAMs 结构可在单轴拉伸、双轴拉伸及剪切等多种加载工况下同时复现生物组织的力学响应。
(2) BSAMs 单胞结构与参数化建模
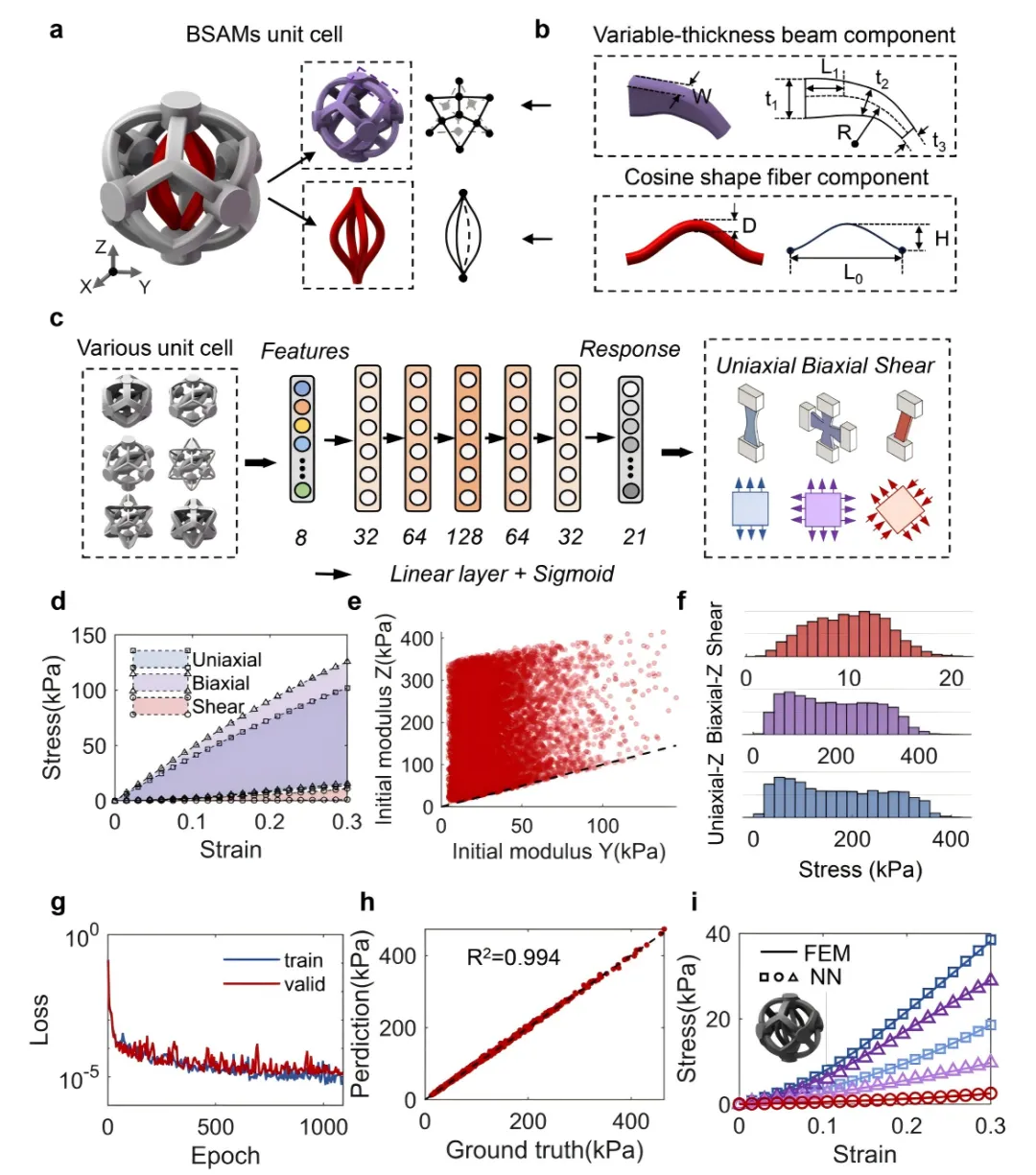
BSAMs 的基本构件为三维周期性单胞,其几何由八个关键参数控制,其中六个参数用于定义准各向同性基体结构;两个参数用于控制定向增强纤维的形态与刚度。基体部分采用改进的 FCC 拓扑作为连接骨架,并引入变厚度曲梁结构,以增强大变形下的非线性响应能力;定向纤维部分则通过余弦曲线扫掠生成,从而模拟软组织中纤维逐渐被拉直、逐步参与承载的过程。(见图3)
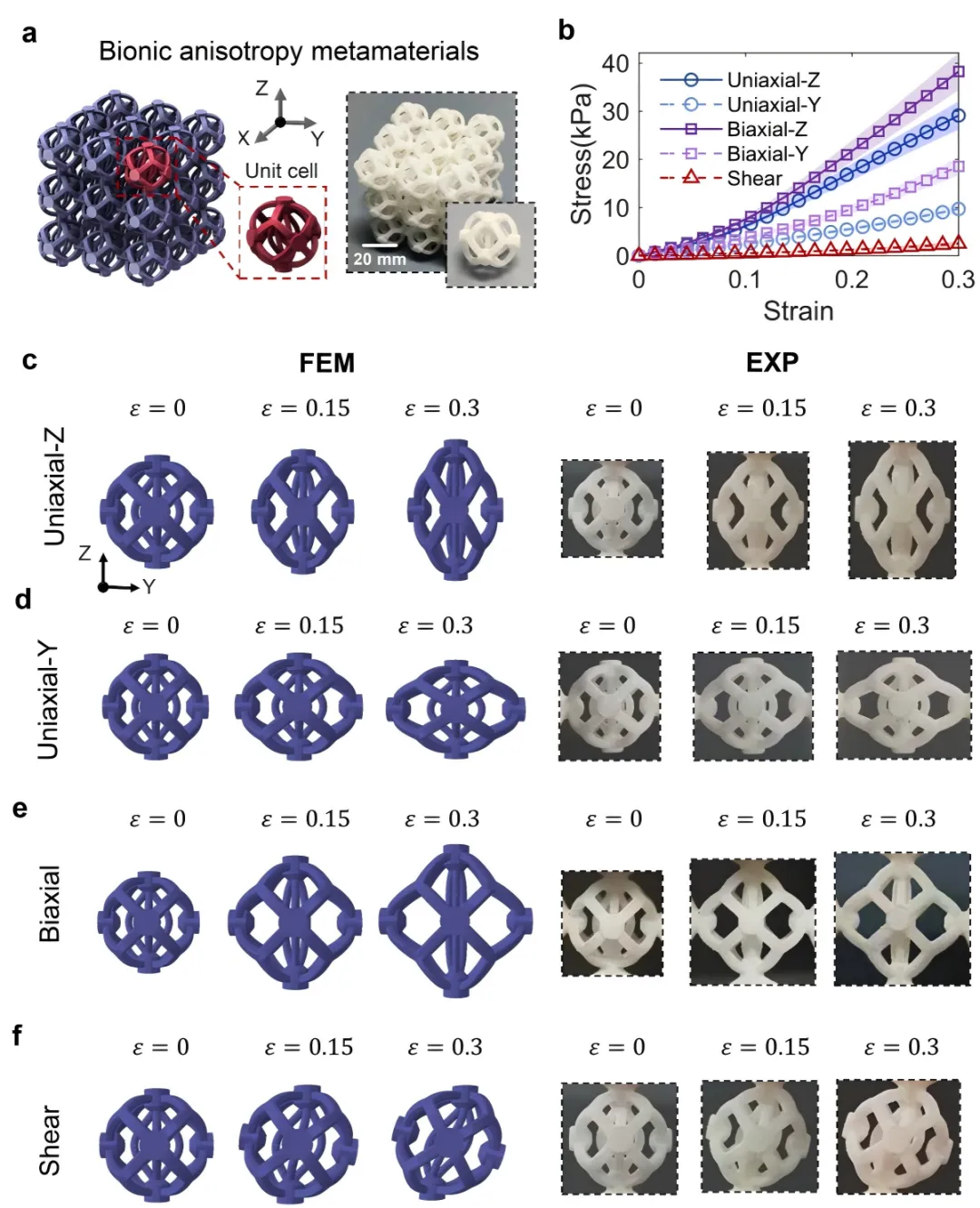
图2 BSAM 单胞在多加载工况下的各向异性非线性力学响应。(a) BSAM 单胞的三维模型及基于选择性激光烧结(SLS)3D 打印制备的实物样品;(b) BSAM 单胞在不同加载条件下的实验应力–应变曲线,阴影区域表示实验误差范围;(c–f) 在周期性边界条件下,单胞有限元仿真结果(左)与实物样品实验变形形态(右)的对比,分别对应:(c) Z 方向单轴拉伸,(d) Y 方向单轴拉伸,(e) YZ 平面内双轴拉伸,(f) YZ 平面内纯剪切加载。
图3 多加载工况下 BSAM 单胞非线性各向异性力学响应的前向预测神经网络模型及其性能。(a) BSAM 结构示意,由准各向同性基体结构和定向纤维增强结构组成;(b) BSAM 单胞的几何参数化分解,包括变厚度曲梁结构和余弦形纤维结构,共八个可调参数;(c) 前向神经网络模型结构示意,输入为 8 维几何参数向量,输出为 21 维大变形应力–应变曲线;(d) BSAM 单胞在 Z 向单轴、Z 向双轴及剪切加载条件下的应力–应变曲线上下界,阴影区域表示可实现的力学响应范围;(e) 数据集中 Y 方向与 Z 方向初始弹性模量的联合分布;(f) 不同加载条件下初始弹性模量的统计分布;(g) 神经网络训练与验证过程中损失函数随迭代次数的变化;(h) 神经网络预测结果与有限元结果在 Z 向单轴拉伸下的对比;(i) 代表性 BSAM 单胞在五种加载工况下,神经网络预测与有限元计算结果的对比。
这种参数化设计不仅具有较高的几何自由度,还能够保证不同单胞之间的良好连接性,为后续的区域化与梯度化设计奠定基础。
(3)多加载工况下的各向异性力学响应验证
为了验证 BSAMs 在多种加载条件下的力学一致性,作者选取代表性单胞,在以下工况下进行了有限元分析与实验测包括纤维方向单轴拉伸、横向单轴拉伸、双轴拉伸、纯剪切加载。结果表明,沿纤维方向加载时,结构刚度显著提高;双轴加载下的力学响应明显强于单轴情况;剪切工况下应力水平远低于拉伸工况,与软组织特性一致。
仿真结果与实验观测在变形模式与应力—应变曲线上均高度一致,验证了 BSAMs 在多加载条件下对软组织力学行为的准确复现能力。(见图2)
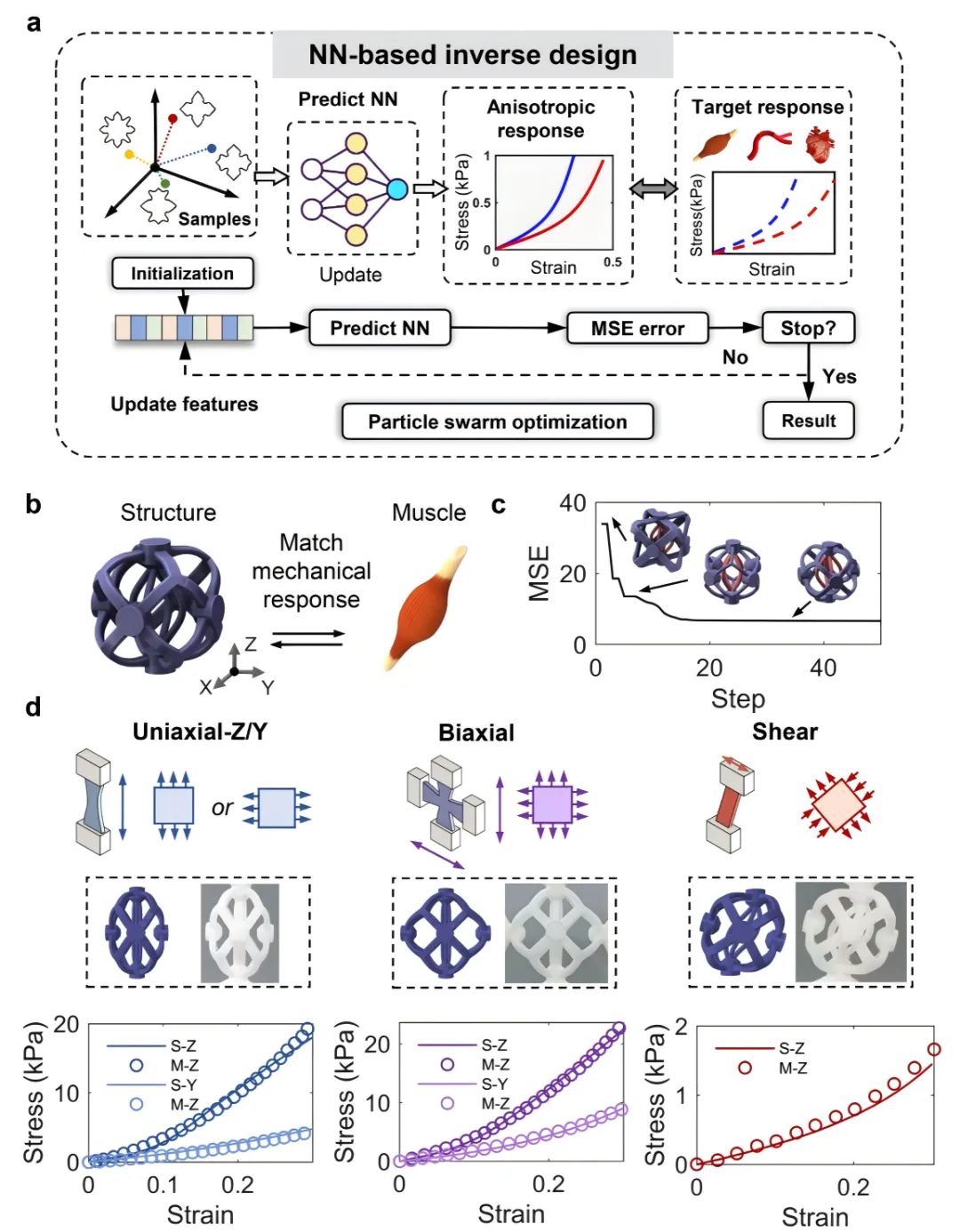
图4 面向多加载工况的 BSAM 单胞反向设计方法及验证。(a) 基于神经网络代理模型与粒子群优化(PSO)相结合的多目标反向设计框架;(b) 以骨骼肌组织为目标的反向设计结果,包括优化得到的 BSAM 单胞结构、3D 打印样品及其力学响应对比;(c) 优化过程中目标函数(均方误差,MSE)随迭代次数的收敛曲线;(d) 在单轴拉伸、双轴拉伸和剪切加载条件下,优化后的 BSAM 结构与文献报道骨骼肌实验数据的应力–应变曲线对比。
(4) 基于神经网络的多工况反向设计方法
由于 BSAMs 的几何参数与力学响应之间关系高度非线性,直接依赖有限元进行反向设计将面临巨大的计算成本。为此,作者构建了一个前向预测神经网络模型,用于快速预测单胞在多种加载工况下的非线性应力—应变曲线。
该模型以 8 维几何参数为输入,输出不同加载条件下的离散应力—应变数据,并分别针对单轴、双轴与剪切工况进行训练。训练结果表明,神经网络预测与有限元结果高度一致,决定系数可达 0.99 以上。(见图3)
在此基础上,结合粒子群优化算法,实现了在多加载工况约束下的反向设计,可直接针对目标软组织力学曲线生成对应的 BSAMs 单胞结构。(见图4)
(5) 多种生物组织力学行为的复现
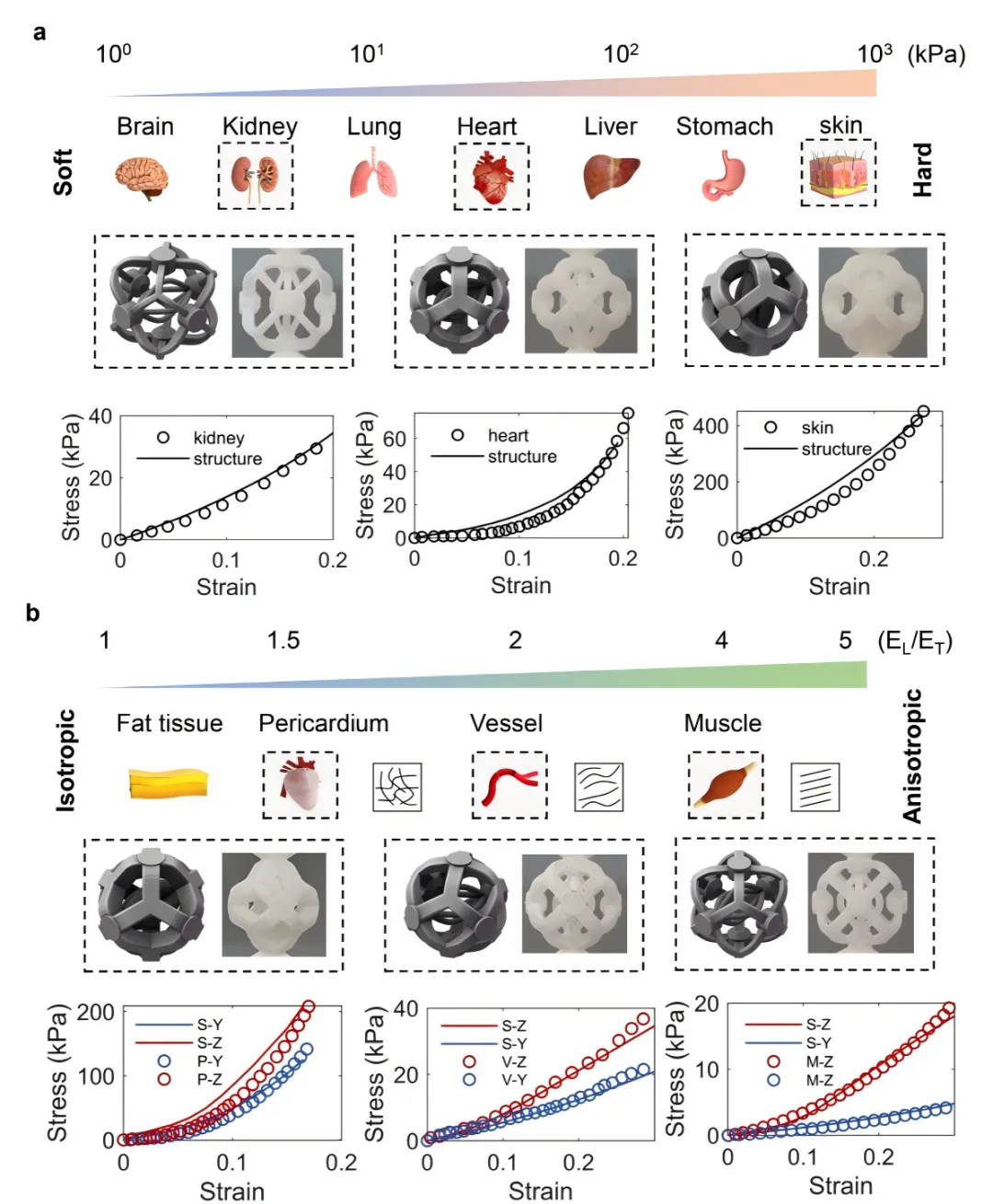
为验证方法的通用性,作者选取了多种力学特性差异显著的生物组织作为目标,包括低模量的肾脏低、心肌、高模量的皮肤、心包、与不同程度各向异性血管与骨骼肌。结果显示,BSAMs 能够在跨越近两个数量级的刚度范围内,准确复现这些组织在大变形下的非线性和各向异性力学响应。(见图5)
图5 不同刚度与各向异性程度软生物组织的大变形力学行为复现结果。(a) 不同弹性模量生物组织(肾脏、心肌和皮肤)在大变形条件下的力学响应复现,其中散点表示文献实验数据,实线表示反向设计得到的 BSAM 单胞响应;(b) 不同各向异性程度生物组织(心包、血管和骨骼肌)在不同加载方向下的力学响应复现,其中红色表示刚度较大的主方向,蓝色表示横向方向,对应的实线为 BSAM 单胞在 Z 方向和 Y 方向的响应。
(6)区域化填充与器官尺度力学分布重构
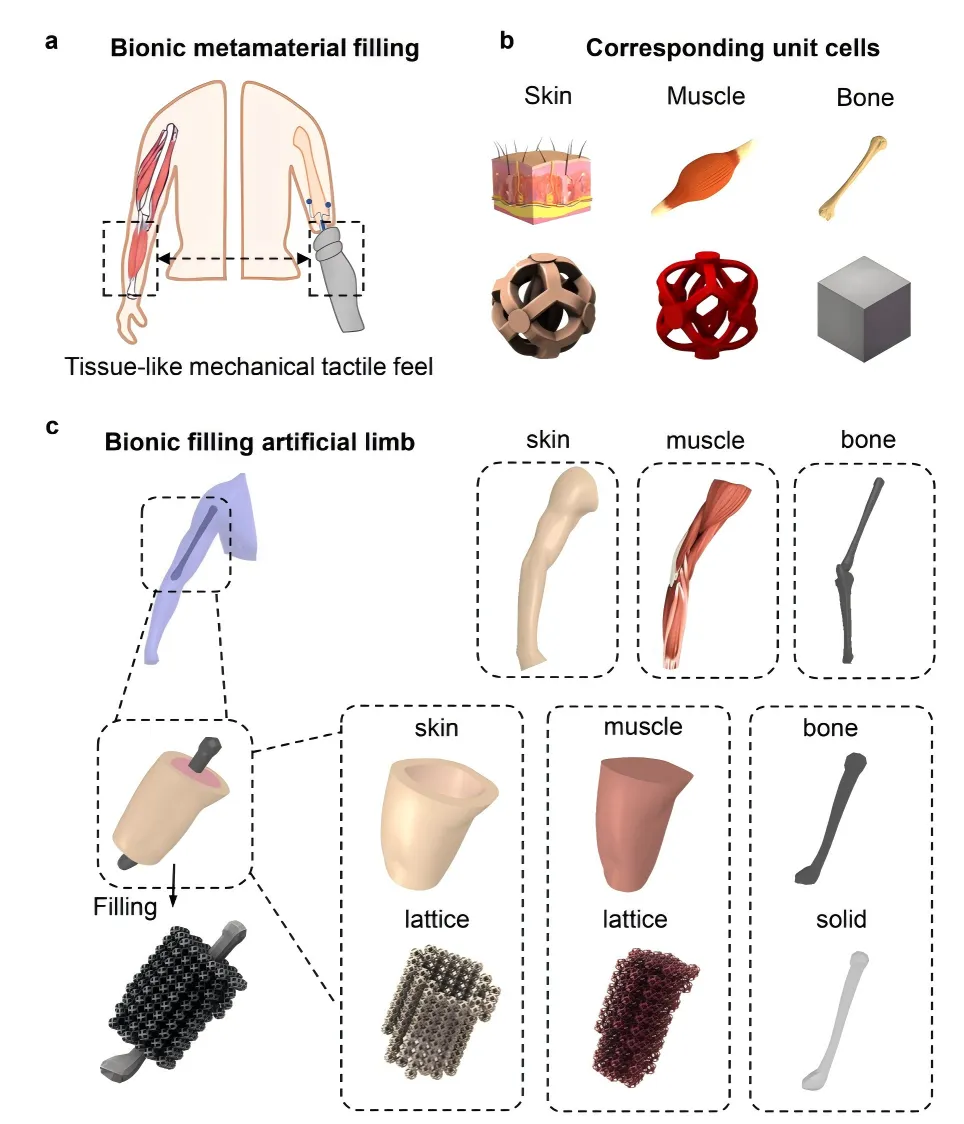
基于单胞之间良好的可拼接性,作者进一步提出了区域化填充策略,用于模拟器官内部不同组织的力学分布特征。以人体上肢为例,通过在“皮肤—肌肉—骨骼”不同区域分别填充力学性能匹配的 BSAMs 单胞,构建了一种具有类人体力学触感的仿生假肢结构。(见图6)
图6 基于区域化填充策略的仿生力学结构设计。(a) 人体上肢力学性能分布的概念示意,用于实现具有类人体触感的假肢或机器人结构;(b) 分别针对皮肤、骨骼肌和骨组织反向设计的 BSAM 单胞结构;(c) 通过区域化填充不同 BSAM 单胞构建的仿生假肢结构,实现几何形态与力学性能分布的同时仿生。
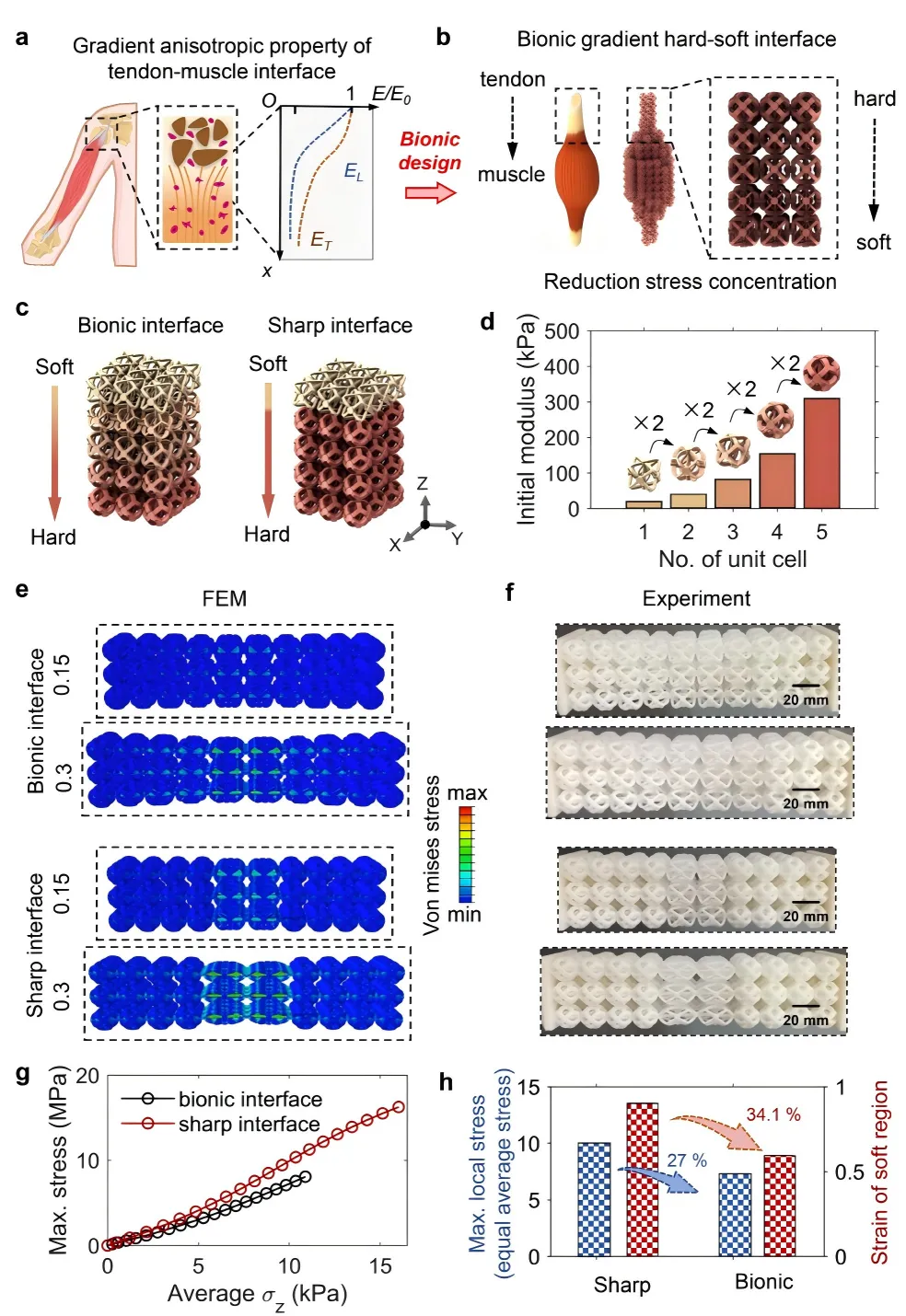
(7)仿生软—硬梯度界面与应力缓释机制
在软组织与硬组织的连接区域,天然生物体系通常通过连续的力学梯度来避免应力集中。作者利用 BSAMs 的参数连续可调特性,构建了一种多层梯度化软—硬界面结构。
对比结果表明,与传统“突变式”界面相比,该仿生梯度界面可显著降低局部最大应力与软区变形程度,在实验中最大应力降低约 27%,有效应变降低约 34%。(见图7)
图7 基于 BSAMs 的仿生软–硬梯度界面设计及其力学性能。(a) 天然骨–腱界面中各向异性力学性能沿界面方向的分布示意;(b) 受肌腱–肌肉结构启发的仿生梯度软–硬界面设计思想;(c) 梯度界面结构与突变式软–硬界面对比试样的几何模型;(d) 梯度界面中各层 BSAM 单胞的初始弹性模量分布;(e, f) 在工程应变为 0.15 和 0.3 时,有限元模拟与实验观测到的结构变形对比;(g) 两种界面结构在相同平均应力条件下的最大局部等效应力对比;(h) 在最大拉伸变形下,两种界面结构的最大局部应力及软相平均有效应变的对比结果。
本文提出了一种面向软生物组织仿真的仿生软各向异性超材料设计框架。通过将结构设计与软组织应变能分解思想相结合,并引入神经网络辅助的多工况反向设计方法,BSAMs 成功实现了在单轴、双轴及剪切加载下对多种软组织力学行为的高保真复现。
此外,BSAMs 在区域化设计与梯度化界面构建方面展现出显著优势,为解决软—硬材料连接、假肢舒适性提升以及软体机器人结构设计等问题提供了新的思路。整体而言,该研究为复杂生物力学行为的工程化复现提供了一种系统、可扩展且具有实际应用潜力的解决方案
原文链接:
DOI:10.1002/adfm.202520564
华南理工大学工程力学系结构冲击防护研究小组
编辑:张弘弛
审核:荆雲杰
排版:陈丽颖
联系人:龙舒畅 副教授
邮箱:longsc@scut.edu.cn