基于Python深度学习的车辆车牌识别系统(PyTorch2卷积神经网络CNN+OpenCV4实现)- 集成到web系统-车牌识别实现
- 2026-06-25 19:27:28
基于Python深度学习的车辆车牌识别系统(PyTorch2卷积神经网络CNN+OpenCV4实现)- 集成到web系统-车牌识别实现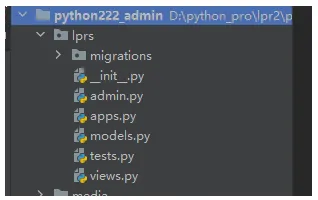


大家好,我是python222_锋哥,最近更新基于Python深度学习的车辆车牌识别系统(PyTorch2卷积神经网络CNN+OpenCV4实现)视频教程系列课程,感谢大家支持。
B站连载更新地址:
https://www.bilibili.com/video/BV1BdUnBLE6N/
本课程采用主流的Python技术栈实现,分两套系统讲解,一套是专门讲PyTorch2卷积神经网络CNN训练模型,识别车牌,当然实现过程中还用到OpenCV实现图像格式转换,裁剪,大小缩放等。另外一套是基于前面Django+Vue通用权限系统基础上(https://www.bilibili.com/video/BV19spseGE9Y/),加了车辆识别业务模型,Mysql8数据库,Django后端,Vue前端,后端集成训练好的模型,实现车牌识别。 点击下方公众号【Python222】小卡片, 回复:888, 👇👇 即可获取锋哥Python视频打包下载 👇👇
👆👆👆点击上方小卡片 回复「888」即可
1,后端模块新建以及实体新建
首先我们使用 manage.py 工具,执行 startapp lprs 命令,新建lprs模块。
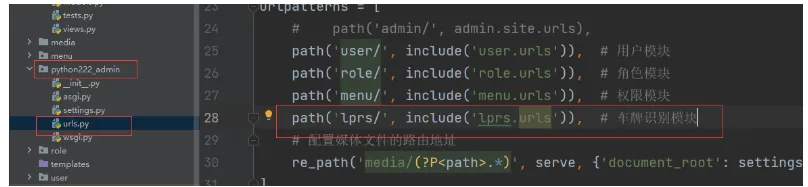
项目ulrs.py里配置下lprs.urls
path('lprs/', include('lprs.urls')), # 车牌识别模块
lprs模块->views.py里我们新建汽车图片上传视图CarImageView和车辆识别视图RecognizeView
fromdjango.shortcutsimportrenderfromdjango.viewsimportView# Create your views here.classCarImageView(View):passclassRecognizeView(View):pass
lprs模块下新建映射文件urls.py
fromdjango.urlsimportpathfromlprs.viewsimportCarImageView, RecognizeViewurlpatterns = [path('uploadCarImage', CarImageView.as_view(), name='uploadCarImage'), # 上传车辆图片path('recognize', RecognizeView.as_view(), name='recognize'), # 识别车辆图片]
lprs模块->models.py下新建Lprs车牌识别实体类
fromdjango.dbimportmodels# Create your models here.# 车牌识别类classLprs(models.Model):id = models.AutoField(primary_key=True)carimage = models.CharField(max_length=255, null=True, verbose_name="车牌图像")result = models.CharField(max_length=20, null=True, verbose_name="车牌识别结果")create_time = models.DateTimeField(null=True, verbose_name="识别时间")classMeta:db_table = "sys_lprs"
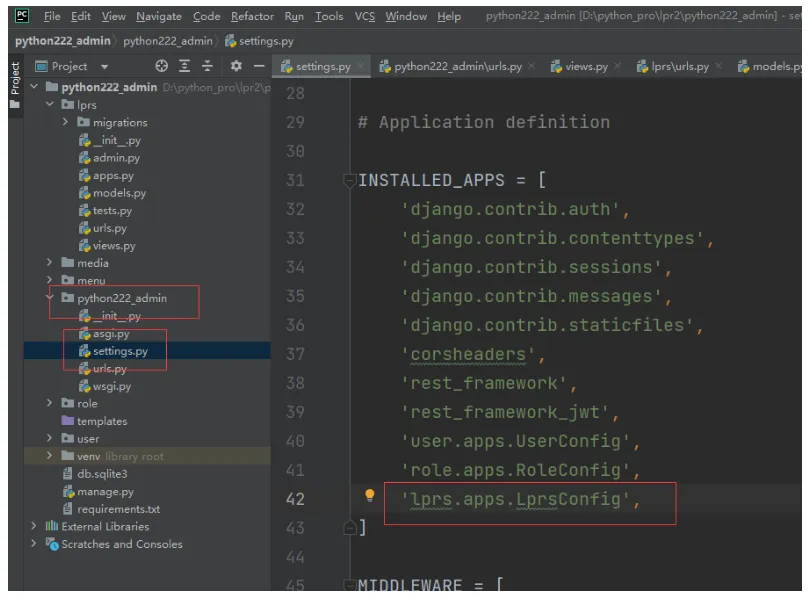
接下来,主项目settings.py里,INSTALLED_APPS 里面加下lprs模块配置
'lprs.apps.LprsConfig',
然后我们通过manage.py里,执行 makemigrations lprs 命令生成迁移文件。
makemigrations lprs
最后我们执行migrate命令执行迁移文件。
2,上传图像后端实现
首先在media下新建carImages目录用来存放上传的图片
图片上传CarImageView具体实现
classCarImageView(View):defpost(self, request):file = request.FILES.get('car')print("file:", file)iffile:file_name = file.namesuffixName = file_name[file_name.rfind("."):]new_file_name = datetime.now().strftime('%Y%m%d%H%M%S') +suffixNamefile_path = str(settings.MEDIA_ROOT) +"\\carImages\\"+new_file_nameprint("file_path:", file_path)try:withopen(file_path, 'wb') asf:forchunkinfile.chunks():f.write(chunk)returnJsonResponse({'code': 200, 'title': new_file_name})except:returnJsonResponse({'code': 500, 'errorInfo': '上传头像失败'})
3,图片上传前端实现
首先我们实现UI界面,一个上传位置和按钮。
实现Car.vue
<template><el-formref="formRef":model="form"label-width="100px"style="text-align: center;padding-bottom:10px"><el-uploadname="car":headers="headers"class="car-uploader":action="getServerUrl()+'lprs/uploadCarImage'":show-file-list="false":on-success="handleSuccess":before-upload="beforeAvatarUpload"><imgv-if="imageUrl" :src="imageUrl"class="car"/><el-iconv-elseclass="car-uploader-icon"><Plus/></el-icon></el-upload><br/><el-buttonsize="large"type="primary">识别车牌</el-button><divstyle="padding: 20px"><strong><fontsize="5">识别结果:</font><fontsize="5"color="red">{{carNo}}</font></strong></div></el-form></template><scriptsetup>import {ref} from"vue";importrequestUtil, {getServerUrl} from"@/utils/request";import {ElMessage} from'element-plus'import {Plus} from'@element-plus/icons-vue'constheaders = ref({Authorization: window.sessionStorage.getItem('token')})constform = ref({id: -1,car: ''})constformRef = ref(null)constimageUrl = ref("")constcarNo=ref("")consthandleSuccess = (res) => {imageUrl.value = getServerUrl() +'media/carImages/'+res.titleform.value.car = res.title;}constbeforeAvatarUpload = (file) => {constisJPG = file.type === 'image/jpeg'constisLt2M = file.size/1024/1024<2if (!isJPG) {ElMessage.error('图片必须是jpg格式')}if (!isLt2M) {ElMessage.error('图片大小不能超过2M!')}returnisJPG&&isLt2M}</script><style>.car-uploader .el-upload {border: 1pxdashed#d9d9d9;border-radius: 6px;cursor: pointer;position: relative;overflow: hidden;width: 500px;height: 500px;}.car-uploader .el-uploadimg{width: 500px;height: 500px;}.car-uploader .el-upload:hover {border-color: #409eff;}.el-icon.car-uploader-icon {font-size: 28px;color: #8c939d;width: 178px;height: 178px;text-align: center;}.car {width: 120px;height: 120px;display: block;}</style>
效果:
4,图片上传测试
点击图像框,选择图片。
页面回显了上传图片。
我们查看下后端media->carImages下
也有图像。
5,识别车牌后端实现
我们在media目录下新建model,把之前训练好的模型文件char.pth放到model目录下。
识别车牌RecognizeView实现:
importjsonfromdatetimeimportdatetimefromdjango.httpimportJsonResponsefromdjango.viewsimportViewfromlprs.modelsimportLprsfrompython222_adminimportsettingsimportosimportcv2importnumpyasnpimporttorchfromtorchvisionimporttransforms# 车牌字符char_table = ['0', '1', '2', '3', '4', '5', '6', '7', '8', '9', 'A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K','L', 'M', 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z', '川', '鄂', '赣', '甘', '贵','桂', '黑', '沪', '冀', '津', '京', '吉', '辽', '鲁', '蒙', '闽', '宁', '青', '琼', '陕', '苏', '晋','皖', '湘', '新', '豫', '渝', '粤', '云', '藏', '浙']# 图像预处理defpre_process(orig_img):gray_img = cv2.cvtColor(orig_img, cv2.COLOR_BGR2GRAY) # BGR色彩空间转换为灰度图像cv2.imwrite('process_img/gray_img.jpg', gray_img) # 保存灰度图blur_img = cv2.blur(gray_img, (3, 3)) # 对灰度图像进行均值模糊,使用3*3的内核来减少图像噪声cv2.imwrite('process_img/blur_img.jpg', blur_img) # 保存模糊图# 对模糊图进行sobel算子处理 对模糊图像进行边缘检测处理# 参数1, 0表示只计算x方向梯度,不计算y方向梯度# ksize=3表示使用3×3的卷积核进行计算# cv2.CV_16S表示输出图像的深度为16位有符号整数sobel_img = cv2.Sobel(blur_img, cv2.CV_16S, 1, 0, ksize=3)sobel_img = cv2.convertScaleAbs(sobel_img) # 转换为8位图像cv2.imwrite('process_img/sobel_img.jpg', sobel_img) # 保存sobel图hsv_img = cv2.cvtColor(orig_img, cv2.COLOR_BGR2HSV) # 获取图像的HSV色彩空间h, s, v = hsv_img[:, :, 0], hsv_img[:, :, 1], hsv_img[:, :, 2]# 黄色色调区间[26,34],蓝色色调区间:[100,124]blue_img = (((h>26) & (h<34)) | ((h>100) & (h<124))) & (s>70) & (v>70)blue_img = blue_img.astype('float32')cv2.imwrite('process_img/hsv.jpg', blue_img)mix_img = np.multiply(sobel_img, blue_img) # 混合图像cv2.imwrite('process_img/mix.jpg', mix_img)mix_img = mix_img.astype(np.uint8) # 转换为uint8ret, binary_img = cv2.threshold(mix_img, 0, 255, cv2.THRESH_BINARY|cv2.THRESH_OTSU) # 二值化cv2.imwrite('process_img/binary.jpg', binary_img)kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (21, 5)) # 定义一个结构元素close_img = cv2.morphologyEx(binary_img, cv2.MORPH_CLOSE, kernel) # 对二值图像进行闭运算,可以填充可能的断裂并去除小的物体cv2.imwrite('process_img/close.jpg', close_img)returnclose_imgdeflist_all_files(root):files = []list = os.listdir(root) # 获取根目录下的所有文件名foriinrange(len(list)):element = os.path.join(root, list[i]) # 获取文件路径ifos.path.isfile(element): # 判断是否是文件files.append(element)elifos.path.isdir(element): # 递归判断子目录files.extend(list_all_files(element))returnfiles# # 验证检测到的矩阵区域是否符合车牌的尺寸比例和面积特征defverify_scale(rotate_rect):error = 0.4# error为车牌允许的宽高比误差aspect = 4# 4.7272 # aspect为期望的车牌宽高比,计算车牌的最小和最大面积。这些值用于过滤掉不符合车牌尺寸的矩形min_area = 10* (10*aspect)max_area = 150* (150*aspect)# 计算车牌区域的宽高比的最小值和最大值,考虑到了误差范围min_aspect = aspect* (1-error)max_aspect = aspect* (1+error)# 宽或高为0,不满足矩形直接返回Falseifrotate_rect[1][0] == 0orrotate_rect[1][1] == 0:returnFalse# 计算旋转矩形r = rotate_rect[1][0] /rotate_rect[1][1]r = max(r, 1/r)area = rotate_rect[1][0] *rotate_rect[1][1] # 计算旋转矩形的面积ifarea>min_areaandarea<max_areaandr>min_aspectandr<max_aspect:returnTruereturnFalse# 将检测到的车牌区域从原始图像中正确的裁剪出来,并进行必要的变换以满足后续处理的需求,如车牌矫正和大小调整defimg_transform(car_rect, image):img_h, img_w = image.shape[:2] # 获取图片的宽高rect_w, rect_h = car_rect[1][0], car_rect[1][1] # 获取车牌的宽和高angle = car_rect[2] # 获取车牌的旋转角度return_flag = Falseifcar_rect[2] == 0.0: # 旋转角度为0return_flag = Trueifcar_rect[2] == 90.0andrect_w<rect_h: # 旋转角度为90 并且 宽高比小于1rect_w, rect_h = rect_h, rect_wreturn_flag = Trueifreturn_flag:"""从原始图像中裁剪出车牌区域。具体来说:使用car_rect[0]作为车牌中心点坐标;根据车牌的宽度rect_w和高度rect_h,计算上下左右边界;从原图image中截取以该中心点为中心、指定宽高的矩形区域作为车牌图像car_img。"""car_img = image[int(car_rect[0][1] -rect_h/2):int(car_rect[0][1] +rect_h/2),int(car_rect[0][0] -rect_w/2):int(car_rect[0][0] +rect_w/2)]returncar_img# 将车牌从图片中切割出来"""1. 使用`cv2.boxPoints`获取旋转矩形的四个顶点坐标。2. 初始化四个变量分别用于记录最左、最下、最高和最右的点。3. 遍历四个顶点,根据坐标更新这四个变量,从而确定矩形的边界点,为后续仿射变换做准备。"""car_rect = (car_rect[0], (rect_w, rect_h), angle) # 创建旋转矩阵box = cv2.boxPoints(car_rect) # 调用函数获取矩形边框的四个点heigth_point = right_point = [0, 0] # 定义变量保存矩形边框的右上顶点left_point = low_point = [car_rect[0][0], car_rect[0][1]] # 定义变量保存矩形边框的左下顶点forpointinbox:ifleft_point[0] >point[0]:left_point = pointiflow_point[1] >point[1]:low_point = pointifheigth_point[1] <point[1]:heigth_point = pointifright_point[0] <point[0]:right_point = point"""这段代码用于根据车牌的旋转角度,对图像进行仿射变换以矫正车牌区域。具体步骤如下:1. 判断角度正负:通过比较左点和右点的纵坐标判断车牌是正角度还是负角度倾斜。2. 构造目标点:根据倾斜方向调整右上角或左下角点的位置,使车牌变为水平。3. 生成变换矩阵:使用`cv2.getAffineTransform`计算三点之间的仿射变换矩阵。4. 执行仿射变换:利用`cv2.warpAffine`将图像展开并裁剪出矫正后的车牌区域。最终返回的是经过旋转矫正后的车牌图像。"""ifleft_point[1] <= right_point[1]: # 正角度new_right_point = [right_point[0], heigth_point[1]]pts1 = np.float32([left_point, heigth_point, right_point])pts2 = np.float32([left_point, heigth_point, new_right_point]) # 字符只是高度需要改变M = cv2.getAffineTransform(pts1, pts2)dst = cv2.warpAffine(image, M, (round(img_w*2), round(img_h*2)))car_img = dst[int(left_point[1]):int(heigth_point[1]), int(left_point[0]):int(new_right_point[0])]elifleft_point[1] >right_point[1]: # 负角度new_left_point = [left_point[0], heigth_point[1]]pts1 = np.float32([left_point, heigth_point, right_point])pts2 = np.float32([new_left_point, heigth_point, right_point]) # 字符只是高度需要改变M = cv2.getAffineTransform(pts1, pts2)dst = cv2.warpAffine(image, M, (round(img_w*2), round(img_h*2)))car_img = dst[int(right_point[1]):int(heigth_point[1]), int(new_left_point[0]):int(right_point[0])]returncar_imgdeflocate_carPlate(orig_img, pred_img):carPlate_list = [] # 车牌列表temp1_orig_img = orig_img.copy() # 拷贝图片 调试用temp2_orig_img = orig_img.copy() # 拷贝图片 调试用# 从二值图像中查找轮廓的函数# cv2.RETR_EXTERNAL参数表示只检索最外层轮廓,# cv2.CHAIN_APPROX_SIMPLE参数表示压缩轮廓的水平、垂直和对角线部分,只保留端点。# 函数返回轮廓列表contours和层级信息heriachy,用于后续的车牌定位处理。contours, hierarchy = cv2.findContours(pred_img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)fori, contourinenumerate(contours):"""这段代码的功能是在调试图像上绘制检测到的轮廓。具体来说:cv2.drawContours()函数用于在temp1_orig_img图像上绘制轮廓contours是要绘制的轮廓点集i表示当前绘制第几个轮廓(0, 255, 255)是绘制的颜色(青色)2是线条粗细度这样可以可视化显示所有检测到的车牌候选区域轮廓,便于调试观察。"""cv2.drawContours(temp1_orig_img, contours, i, (0, 255, 255), 2)"""获取当前轮廓的最小外接矩形,cv2.minAreaRect()函数会计算能够完全包围轮廓的最小面积矩形,并返回一个包含矩形中心点坐标、宽度高度和旋转角度的元组,用于后续的车牌定位和矫正处理。"""rotate_rect = cv2.minAreaRect(contour)# 根据矩形面积大小和长宽比判断是否是车牌ifverify_scale(rotate_rect):# 裁剪车牌并且位置矫正car_plate = img_transform(rotate_rect, temp2_orig_img)cv2.imwrite('process_img/transform_img.jpg', car_plate)# 调整尺寸为后面CNN车牌识别做准备car_plate = cv2.resize(car_plate, (car_plate_w, car_plate_h))cv2.imwrite('process_img/resize_img.jpg', car_plate)carPlate_list.append(car_plate)returncarPlate_list# 左右切割defhorizontal_cut_chars(plate):"""该函数用于对车牌图像进行水平切割,提取字符区域。主要步骤包括:1. 计算每列像素点总和;2. 根据阈值判断字符区域起止位置;3. 限制字符宽度范围以过滤无效区域;4. 返回符合条件的字符区域坐标列表。"""char_addr_list = []area_left, area_right, char_left, char_right = 0, 0, 0, 0img_w = plate.shape[1]# 获取车牌每列边缘像素点个数defgetColSum(img, col):sum = 0foriinrange(img.shape[0]):sum += round(img[i, col] /255)returnsum;sum = 0forcolinrange(img_w):sum += getColSum(plate, col)# 每列边缘像素点必须超过均值的60%才能判断属于字符区域col_limit = 0# round(0.5*sum/img_w)# 每个字符宽度也进行限制charWid_limit = [round(img_w/12), round(img_w/5)]is_char_flag = Falseforiinrange(img_w):colValue = getColSum(plate, i)ifcolValue>col_limit:ifis_char_flag == False:area_right = round((i+char_right) /2)area_width = area_right-area_leftchar_width = char_right-char_leftif (area_width>charWid_limit[0]) and (area_width<charWid_limit[1]):char_addr_list.append((area_left, area_right, char_width))char_left = iarea_left = round((char_left+char_right) /2)is_char_flag = Trueelse:ifis_char_flag == True:char_right = i-1is_char_flag = False# 手动结束最后未完成的字符分割ifarea_right<char_left:area_right, char_right = img_w, img_warea_width = area_right-area_leftchar_width = char_right-char_leftif (area_width>charWid_limit[0]) and (area_width<charWid_limit[1]):char_addr_list.append((area_left, area_right, char_width))returnchar_addr_list# 获取字符defget_chars(car_plate):img_h, img_w = car_plate.shape[:2]h_proj_list = [] # 水平投影长度列表h_temp_len, v_temp_len = 0, 0h_startIndex, h_end_index = 0, 0# 水平投影记索引h_proj_limit = [0.2, 0.8] # 车牌在水平方向得轮廓长度少于20%或多余80%过滤掉char_imgs = []"""这段代码用于对二值化车牌图像进行水平投影分析。它统计每一行的白色像素数量,记录连续有效投影段,并根据比例过滤掉过短或过长的投影区域,最终提取出最可能包含字符的水平区域。"""# 将二值化的车牌水平投影到Y轴,计算投影后的连续长度,连续投影长度可能不止一段h_count = [0foriinrange(img_h)]forrowinrange(img_h):temp_cnt = 0forcolinrange(img_w):ifcar_plate[row, col] == 255:temp_cnt += 1h_count[row] = temp_cntiftemp_cnt/img_w<h_proj_limit[0] ortemp_cnt/img_w>h_proj_limit[1]:ifh_temp_len!= 0:h_end_index = row-1h_proj_list.append((h_startIndex, h_end_index))h_temp_len = 0continueiftemp_cnt>0:ifh_temp_len == 0:h_startIndex = rowh_temp_len = 1else:h_temp_len += 1else:ifh_temp_len>0:h_end_index = row-1h_proj_list.append((h_startIndex, h_end_index))h_temp_len = 0# 手动结束最后得水平投影长度累加ifh_temp_len!= 0:h_end_index = img_h-1h_proj_list.append((h_startIndex, h_end_index))"""这段代码的功能是:1. 遍历水平投影列表,找出最长的有效投影段(即字符区域)。2. 若该投影段高度不足图像总高度的50%,则认为未检测到有效车牌字符,直接返回空结果。3. 否则,截取该区域作为车牌主体部分,并调用[horizontal_cut_chars]函数进一步横向切割出每个字符的边界。4. 根据字符边界从原图中提取每个字符图像,缩放到统一尺寸后加入结果列表返回。"""h_maxIndex, h_maxHeight = 0, 0fori, (start, end) inenumerate(h_proj_list):ifh_maxHeight< (end-start):h_maxHeight = (end-start)h_maxIndex = iifh_maxHeight/img_h<0.5:returnchar_imgschars_top, chars_bottom = h_proj_list[h_maxIndex][0], h_proj_list[h_maxIndex][1]plates = car_plate[chars_top:chars_bottom+1, :]cv2.imwrite('process_img/plate.jpg', plates)char_addr_list = horizontal_cut_chars(plates)fori, addrinenumerate(char_addr_list):char_img = car_plate[chars_top:chars_bottom+1, addr[0]:addr[1]]char_img = cv2.resize(char_img, (char_w, char_h))char_imgs.append(char_img)returnchar_imgsdefextract_char(car_plate):gray_plate = cv2.cvtColor(car_plate, cv2.COLOR_BGR2GRAY) # 转为灰度图ret, binary_plate = cv2.threshold(gray_plate, 0, 255, cv2.THRESH_BINARY|cv2.THRESH_OTSU) # 二值化cv2.imwrite('process_img/binary_plate.jpg', gray_plate)returnget_chars(binary_plate)# 识别车牌字符defcnn_recongnize_char(img_list, model_path):model = torch.load(model_path, weights_only=False) # 加载模型text_list = [] # 识别结果tf = transforms.ToTensor()forimginimg_list:"""这段代码的功能是:将图像数据转换为模型输入格式。具体包括:1. `np.array(img)` - 将PIL图像转换为numpy数组2. `tf()` - 使用ToTensor变换将numpy数组转换为PyTorch张量3. `.unsqueeze(0)` - 在第0维添加批次维度,使单张图像变为批次大小为1的张量,符合模型输入要求"""input = tf(np.array(img)).unsqueeze(0)withtorch.no_grad():output = model(input)_, predicted = torch.topk(output, 1)text_list.append(char_table[predicted])returntext_list# Create your views here.classCarImageView(View):defpost(self, request):file = request.FILES.get('car')print("file:", file)iffile:file_name = file.namesuffixName = file_name[file_name.rfind("."):]new_file_name = datetime.now().strftime('%Y%m%d%H%M%S') +suffixNamefile_path = str(settings.MEDIA_ROOT) +"\\carImages\\"+new_file_nameprint("file_path:", file_path)try:withopen(file_path, 'wb') asf:forchunkinfile.chunks():f.write(chunk)returnJsonResponse({'code': 200, 'title': new_file_name})except:returnJsonResponse({'code': 500, 'errorInfo': '上传头像失败'})char_model_path = str(settings.MEDIA_ROOT) +"\\model\\"+"char.pth"car_plate_w, car_plate_h = 136, 36# 车牌宽高char_w, char_h = 20, 20# 字符宽高classRecognizeView(View):defpost(self, request):data = json.loads(request.body.decode("utf-8"))car = data['car']file_path = str(settings.MEDIA_ROOT) +"\\carImages\\"+carprint("file_path:", file_path)img = cv2.imread(file_path) # 读取图片pred_img = pre_process(img) # 预处理图片car_plate_list = locate_carPlate(img, pred_img) # 车牌定位result = ''iflen(car_plate_list) == 0:result = '识别失败!'else:car_plate = car_plate_list[0] # 获取车牌char_img_list = extract_char(car_plate) # 获取车牌字符foridinrange(len(char_img_list)):img_name = 'char/char-'+str(id) +'.jpg'cv2.imwrite(img_name, char_img_list[id])text = cnn_recongnize_char(char_img_list, char_model_path)print('识别结果:', text)result = ''.join(text)# 识别记录存数据库obj_lprs = Lprs(carimage=car, result=result)obj_lprs.create_time = datetime.now()obj_lprs.save()returnJsonResponse({'code': 200, 'result': result})
6,识别车牌前端实现
Car.vue定义点击事件方法handleConfirm:
consthandleConfirm = async () => {letresult = awaitrequestUtil.post("lprs/recognize", form.value);letdata = result.data;if (data.code == 200) {carNo.value=data.result} else {ElMessage.error(data.errorInfo);}}
按钮上注册点击事件:
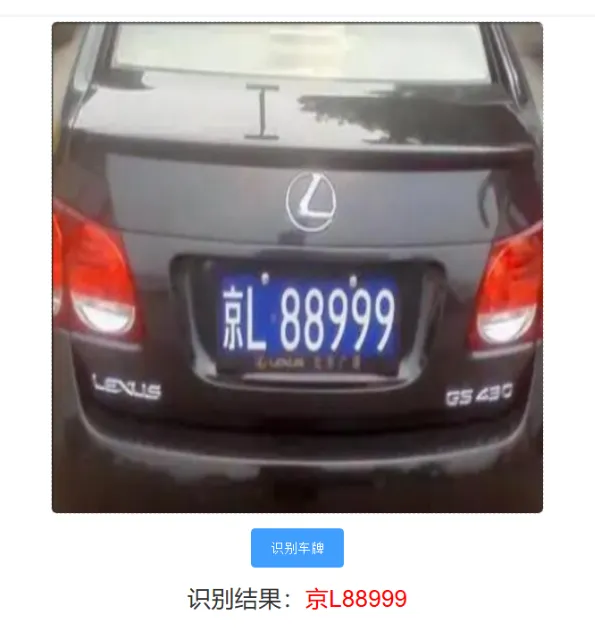
7,识别车牌测试
我们上传车牌图像,然后点击“识别车牌”按钮测试:
点击下方公众号【Python222】小卡片, 回复:888, 👇👇 即可获取锋哥Python视频打包下载 👇👇
👆👆👆点击上方小卡片 回复「888」即可
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

