零基础入门智能家居机器人:从系统搭建到Python编程,一篇搞定!想亲手打造一台能听、能看、能干活的智能家居机器人?别急着买成品!今天咱们从最基础的第一步开始,手把手教你搭建嵌入式开发环境,玩转Linux系统和Python编程——这可是智能家居机器人的“大脑”核心,打好基础才能解锁后续所有酷炫功能~
一、为什么选Raspbian Linux?机器人的“操作系统”怎么选?
智能家居机器人要同时处理传感器数据、控制电机运动、运行视觉识别,对系统的稳定性和轻量化要求极高。而Raspbian Linux(基于Debian优化的嵌入式系统)就是最完美的选择:
轻量高效:占用资源少,能流畅运行在ARM核心的嵌入式控制板上,不卡顿;
兼容性强:完美支持摄像头、传感器、电机驱动等硬件,免驱适配大部分USB设备;
开发友好:自带Python环境和丰富的开源库,新手也能快速上手。
简单说,Raspbian就是为机器人量身定制的“操作系统”,既稳定又灵活,是入门智能硬件开发的首选。
二、手把手搭建开发环境:3步搞定系统安装
1. 准备工具(必备清单)
嵌入式控制板(如树莓派)、SD卡(建议≥16GB)、读卡器;
电脑(Windows/Mac/Linux均可)、电源适配器、显示器+键鼠;
软件:Win32DiskImager(烧录系统)、Raspbian镜像文件(官网免费下载)。
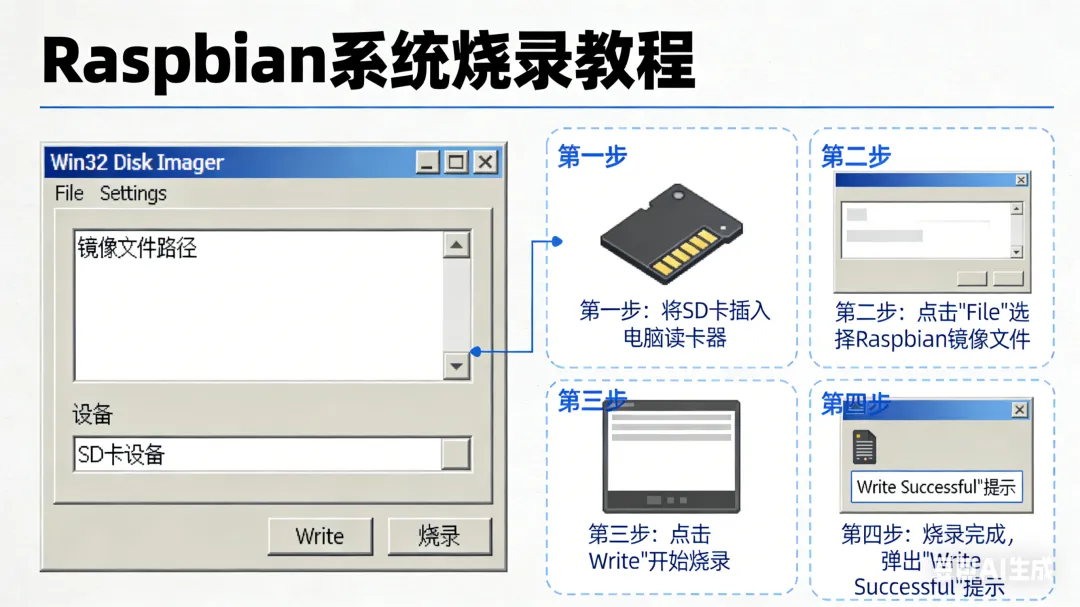
2. 烧录系统:给SD卡“装系统”
下载Raspbian镜像后,用Win32DiskImager打开,选择镜像文件和SD卡盘符(重点!别选错盘符,会清空数据);
点击“Write”开始烧录,等待5-10分钟(取决于SD卡速度);
烧录完成后,将SD卡插入嵌入式控制板,连接显示器、键鼠和电源,开机即可启动系统。
3. 系统初始化配置:关键设置不能少
首次启动会自动进入Raspi-config配置界面,用键盘操作完成以下核心设置:
扩展SD卡空间:选择“Expand Rootfs”,让系统占用整个SD卡容量(默认只占2GB);
设置时区和语言:选择“Change Locale”和“Change Timezone”,适配中文环境和本地时间;
更改默认密码:默认用户名“pi”、密码“raspberry”,建议改成复杂密码,提升安全性;
启动桌面环境:选择“Boot Behaviour”,设置为默认启动图形桌面(新手友好)。
配置完成后重启系统,就能看到熟悉的图形桌面啦~
三、Linux基础操作:机器人开发必备命令
Raspbian基于Linux,掌握这些核心命令,就能轻松管理文件、安装软件、控制硬件:
1. 文件管理高频命令
ls:查看当前目录下的文件/文件夹(ls -l显示详细信息,ls -a显示隐藏文件);
cd:切换目录(cd /home/pi进入主目录,cd ..返回上一级目录);
mkdir/rm:创建/删除目录(rm -r删除非空目录,谨慎使用!);
touch/mv:创建文件/重命名文件(touch test.py创建Python文件)。
2. 软件安装与管理
sudo apt-get update:更新软件源列表;
sudo apt-get install 软件名:安装软件(如sudo apt-get install python3-pip安装Python包管理工具);
sudo apt-get remove 软件名:卸载软件(purge参数可彻底删除配置文件)。
3. 实用技巧
四、Python入门:写出第一个机器人控制程序
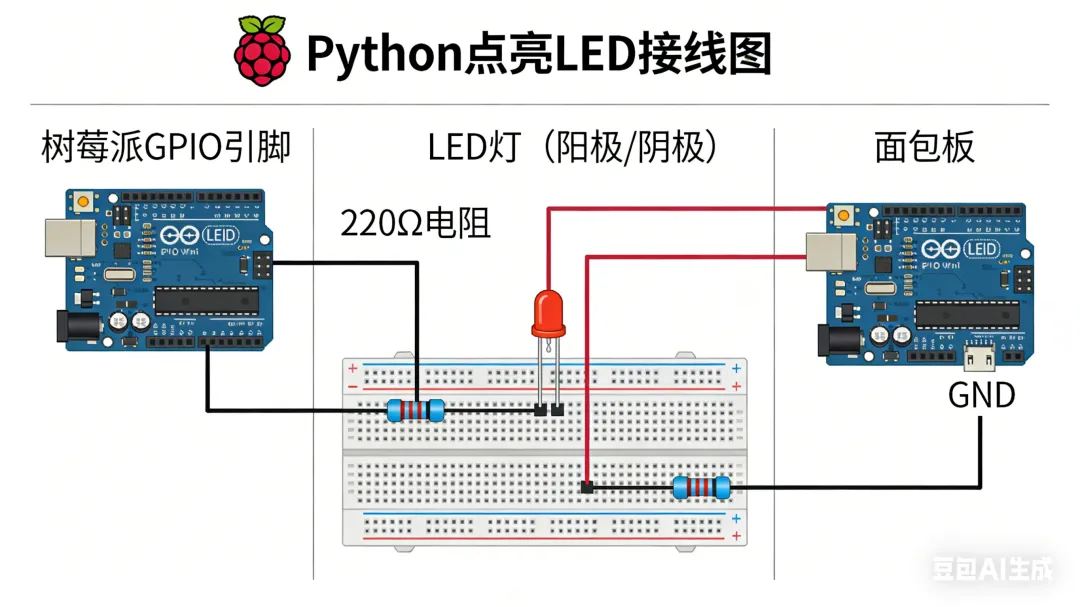
Python是智能家居机器人开发的核心语言,简单易学且功能强大。现在我们来写一个“点亮LED”的基础程序,迈出机器人编程第一步~
1. 准备工作
2. 编写程序
打开IDLE3(Python开发环境):在桌面菜单选择“Programming→IDLE3”;
新建文件:点击“File→New File”,输入以下代码:
import RPi.GPIO as GPIOimport time# 设置GPIO模式为BCM编码GPIO.setmode(GPIO.BCM)# 将GPIO25设置为输出模式GPIO.setup(25, GPIO.OUT)# 让LED闪烁5次for i in range(5): GPIO.output(25, GPIO.HIGH) # 点亮LED time.sleep(1) # 暂停1秒 GPIO.output(25, GPIO.LOW) # 熄灭LED time.sleep(1) # 暂停1秒# 清理GPIO资源GPIO.cleanup()
保存文件为“[blink.py](blink.py)”,点击“Run→Run Module”运行程序;
看到LED循环闪烁,就说明程序运行成功啦!
3. 代码解析
RPi.GPIO:控制GPIO引脚的核心库,用于硬件操作;
time.sleep(1):控制LED亮灭的间隔时间(单位:秒);
循环结构:for i in range(5)表示执行5次闪烁动作,可修改数字调整闪烁次数。
五、本章核心成果与后续展望
通过本章学习,你已经完成了智能家居机器人开发的基础准备:
接下来,我们将基于这个基础,逐步解锁更多强大功能:下一章将学习GPIO口的高级应用、串口通信,还能制作定时台灯、简易发音板等实用小项目;后续更会深入视觉识别、语音控制、自动避障等核心功能,最终打造出一台功能完善的智能家居机器人~
如果在操作过程中遇到问题(比如系统烧录失败、LED不亮),可以在评论区留言,我们一起排查解决!关注我,后续持续更新智能家居机器人开发全流程,从入门到精通~
《智能家居机器人设计与控制》深度解析
本篇文章内容来源于:智能家居机器人设计与控制[谭立新著]2015年版