在工控编程里,我们天天和点位、模块、程序打交道。可你有没有想过:为什么西门子 PCS7 能做到一套模板控百台设备?为什么 Linux 能兼容万千硬件,却不用重写驱动?答案只有一个:设备无关性。
把物理硬件与逻辑程序彻底解耦,把重复劳动变成模板配置,把 “写点位” 升级为 “定义对象”。
这篇文章,我将借鉴 PCS7 与 Linux 设备树的思想,在欧姆龙 PLC上,完整描述一套真正面向对象、极致解耦、可复用、可扩展的项目思维。
一、思考
声明:本文以欧姆龙PLC编程平台为基础,探讨一种极致的编程思想——实现设备无关性、极致的面向对象编程、极致解耦物理IO点与程序抽象逻辑。这些思考将推动我对程序、IO表、图纸做出一系列根本性的改动。
在文章开始前,先问一个经典问题:把大象放进冰箱需要几步?
答案是三步:打开冰箱,把大象放进去,关上冰箱。在这个问题中,“打开”“放进去”“关闭”是过程,“大象”“冰箱”是对象。
现在问题变了:把长颈鹿放进去需要几步?
还是三步:打开冰箱,把长颈鹿放进去,关上冰箱。
很清晰——这个过程本身没有发生任何改变。但现在大象和长颈鹿都站在冰箱门口,需要几个冰箱?两个:一个胖冰箱放大象,一个高冰箱放长颈鹿。
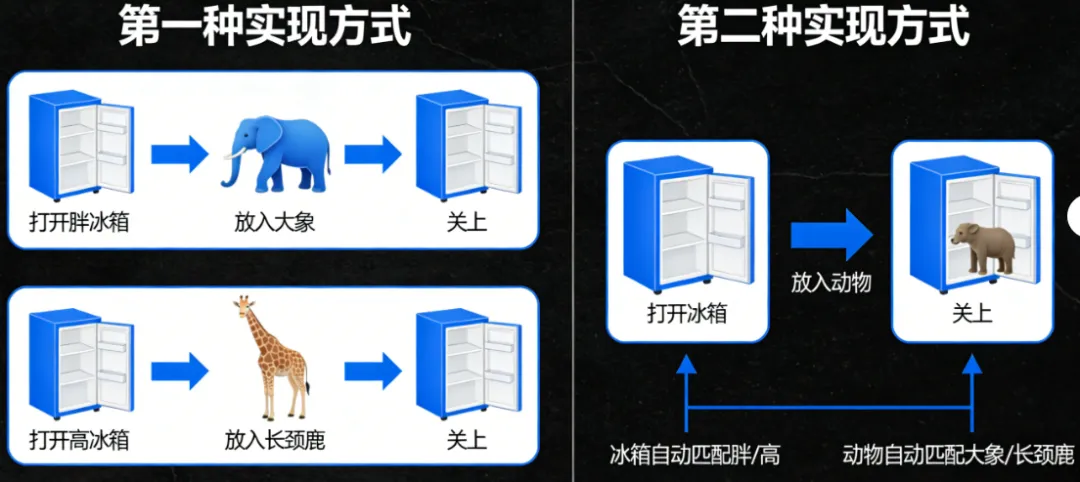
于是我们有了两种实现方式:
方式一(过程式)打开胖冰箱 → 放大象 → 关上胖冰箱打开高冰箱 → 放长颈鹿 → 关上高冰箱
方式二(面向对象式)打开冰箱 → 放动物 → 关上冰箱
其中,“高冰箱”“胖冰箱”自动代入“冰箱”,“大象”“长颈鹿”自动代入“动物”。
显然,方式二更加高级优雅。它把“打开-放入-关闭”这个过程封装起来,把“冰箱”和“动物”作为对象描述——这正是面向对象编程的核心思想。
而我在PLC程序架构上的探索,本质上就是在做这件事。自动代入对象,封装过程!
二、两个顶级参照:PCS7 与 Linux 设备模型
面向对象不是 PLC 原创,它本就是计算机世界的底层逻辑。我举两个非PLC但离我们很近的例子:一个是万泉河老师分享的PCS7概念,一个是Linux设备模型。
PCS7是西门子的DCS系统,专门用于过程自动化(如化工、制药、电力等行业)。它最核心的设计思想就是面向对象和模板化。
在传统PLC编程中,如果项目里有100个相同的电机,你可能需要复制粘贴100遍类似的程序,或者手动维护100套IO地址。但在PCS7里,工程师只需要做好一套电机控制模板(CFC),然后在工程视图中把这100个电机当成100个“对象”拖进去,通过列表批量填写它们的参数(比如哪个电机接哪个泵、报警值设多少)。
PCS7引入了“过程对象(PO)”的概念——一个电机是一个PO,一个阀门也是一个PO。工程师站软件就是按PO数量来授权的。这意味着你在编程时,脑子里想的不再是“I0.0、Q0.1”这些散点,而是“电机1、阀门2、PID回路3”这些对象。程序框架和HMI画面都可以通过模板自动生成,工作量从“写代码”变成了“配置对象”。
这就是PCS7对“设备无关性”的诠释——无论是什么型号的电机,在程序眼里它就是一个“电机对象”。
Linux作为支持成千上万种硬件的操作系统,必须解决“统一管理”的问题。它的解决方案是:通过设备树(Device Tree)来描述硬件。
设备树:只描述硬件我有什么设备、挂在哪条总线、用哪个中断、地址多少。
驱动:只实现逻辑open、read、write 一套标准接口。
设备树是一种数据结构,它告诉内核:我有一个叫“电机”的设备,它挂在哪条总线上,用哪个中断,寄存器地址是多少。而设备驱动(如motor_driver.c)只负责实现控制逻辑,比如提供open()、read()、write()这些标准接口。
这样一来,硬件描述和驱动逻辑就分离了。换了一个不同型号的电机,只需要改设备树文件里的描述,驱动代码不用动。上层应用程序看到的永远是/dev/motor0这样的文件接口,根本不知道背后是A公司的电机还是B公司的电机。
这就是Linux的“设备无关性”——通过统一接口屏蔽底层差异,让上层逻辑专注于业务本身。
这两个例子给我的启发是:无论是过程控制还是操作系统,它们都在追求同一件事——把物理世界的多样性,抽象成逻辑世界的统一性。硬件在变、型号在换,但只要描述清楚,上层只管调用接口。这不正是我在PLC上想做的事吗?
三、在欧姆龙平台上的实现与改动
核心思维是:组态 → 业务对象(轴、气缸、CCD等)
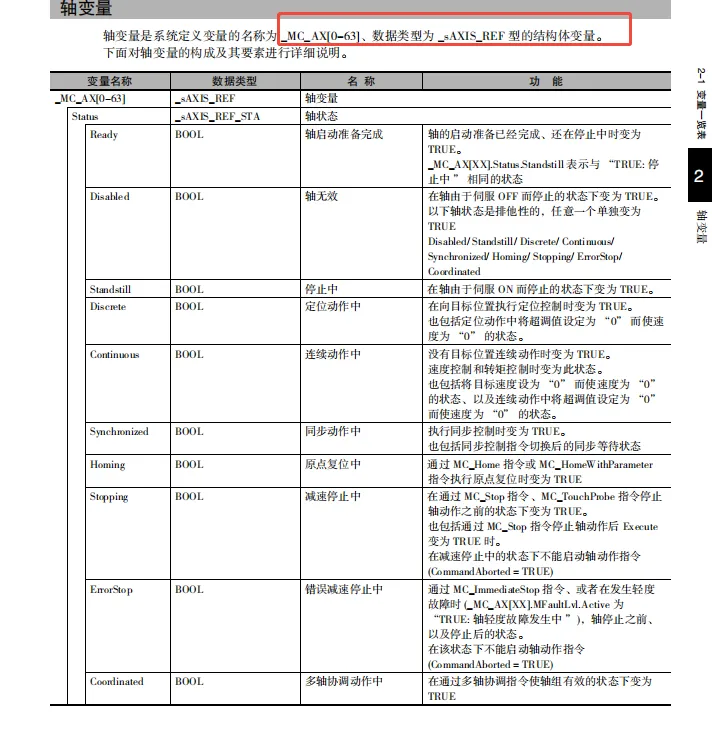
用过欧姆龙的都知道,用EtherCAT总线轴控制的时候很简单——因为欧姆龙底层对轴已经描述好了。在欧姆龙手册《运动控制篇》中,我们可以看到轴的PDO配置已经映射到了描述轴的结构体中。
由此我得出一个结论,既然工位控制过程 气缸控制过程 相机控制过程 都没有对应的一个系统结构体,而我们在做过程FB的时候已经描述好了这些对象,为什么不能将配置一起打包进FB呢?答案是可以的,基于此思想,下面展开描述
欧姆龙手册运动控制篇手册如图:
(欧姆龙手册运动控制篇)接下来本文以工位1气缸1为例,描述整套程序框架的改动:1、IO表规划
在IO表中,我们不再使用X、Y、I、Q这类代指点位的名称。模块的插槽和点位才是主体,使用以下规则(规则可自定义,本文仅示例):
M01U02A3——
M01:第1个EtherCAT通讯模块(耦合器或主站)
U02:第2个插槽
A3:第3个输入点
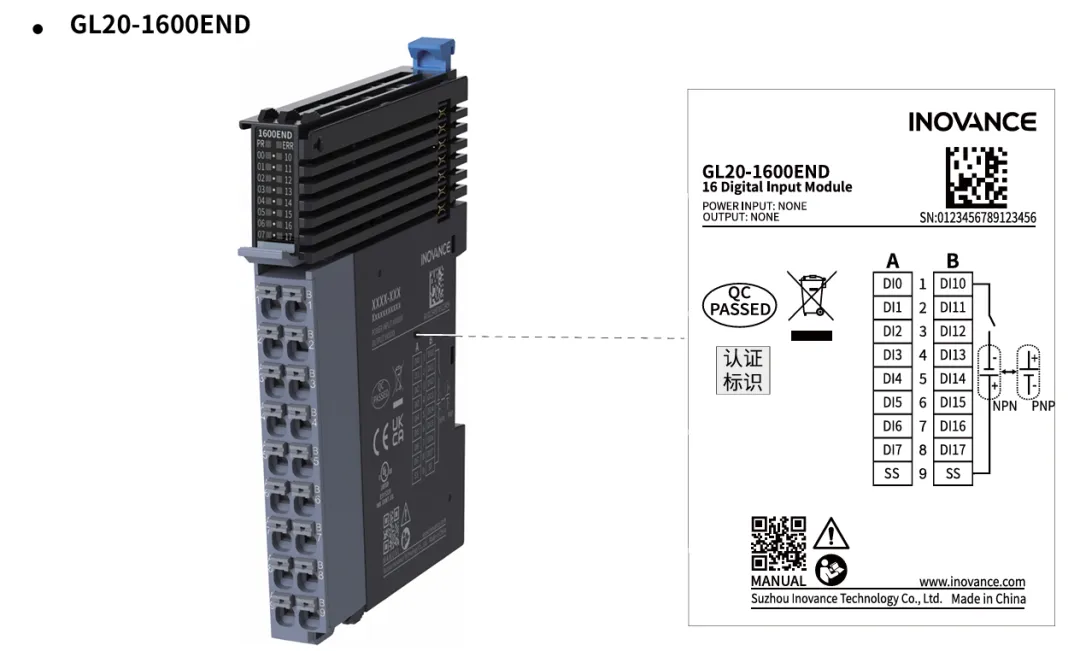
为什么用A3?因为我使用的是汇川GL20-16模块,这款模块上自带的标识就是A1-A9、B1-B9。我们完全面向物理层面——模块叫什么,我们叫什么。这个代号仅具备索引物理位置的作用,不再承载其他含义。汇川模块如图:
(汇川GL20-16模块实物图,标注A1-A9、B1-B9)但是这个点位的名称不叫M01U02A3。点位名称叫做:
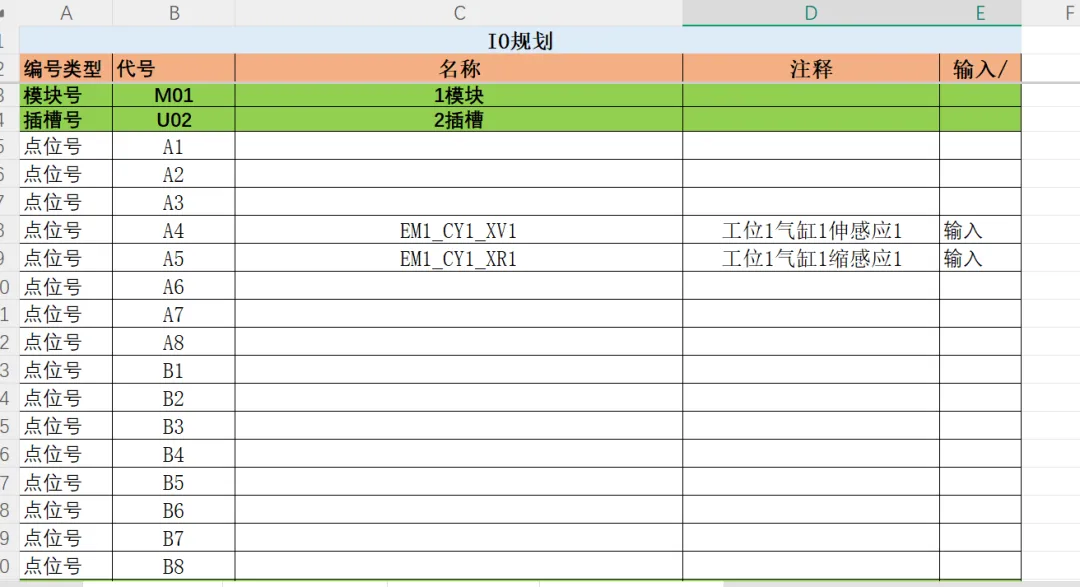
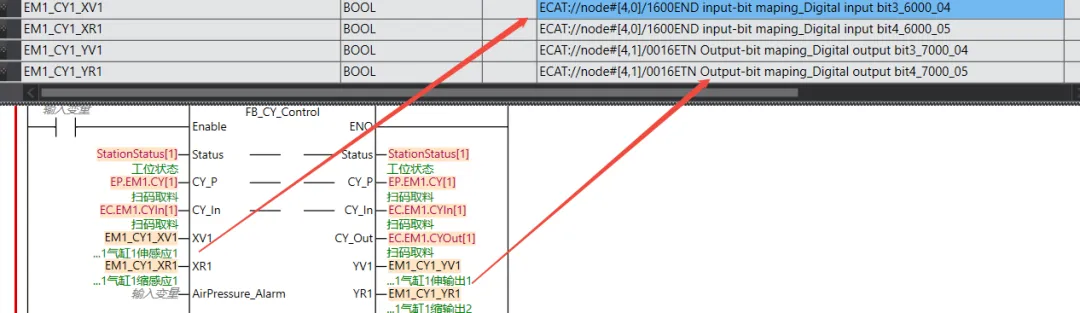
EM1_CY1_XV1:工位1气缸1伸感应1
EM1_CY1_XR1:工位1气缸1缩感应1
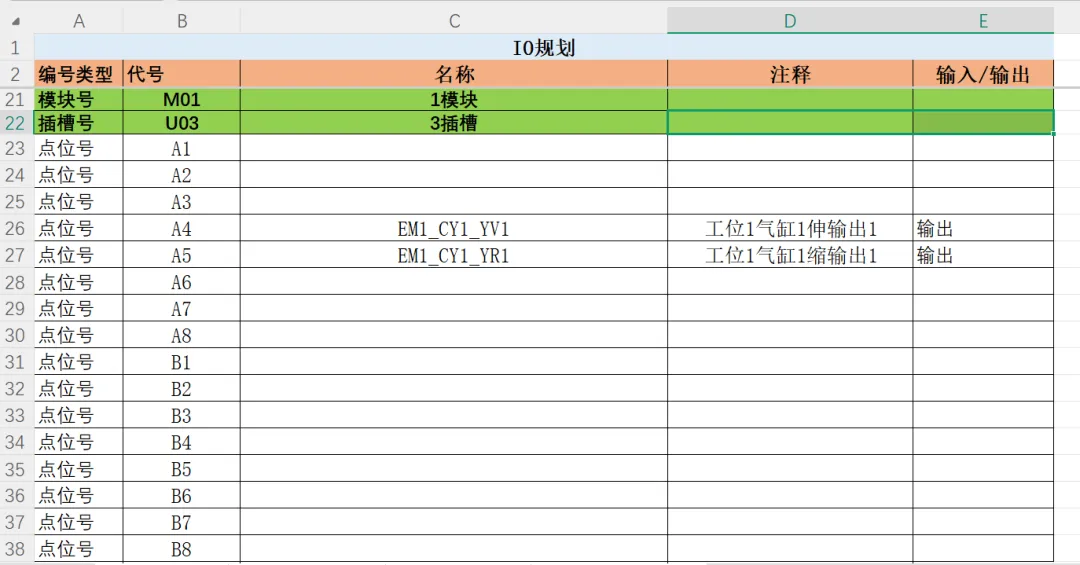
IO表如图:
(IO表输入截图)输出同理:
M01U03A3→EM1_CY1_YV1(工位1气缸1伸输出1)
M01U03A4→EM1_CY1_YR1(工位1气缸1缩输出1)
IO表如图:
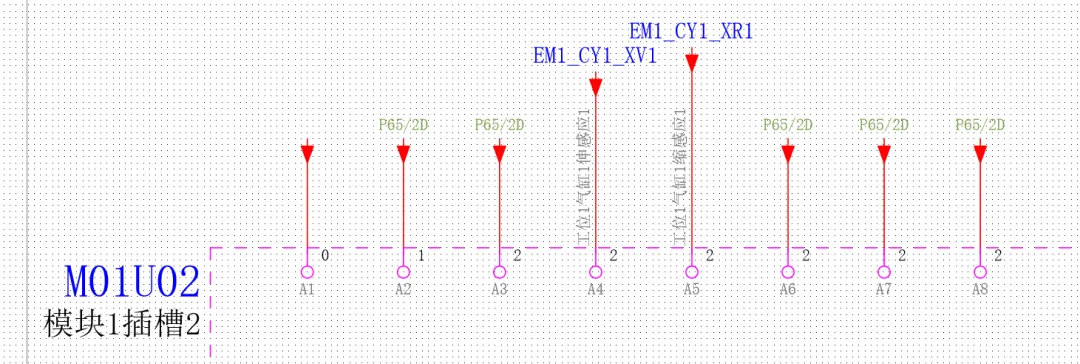
(IO表输出截图)2、图纸改动
图纸中,IO点的黑盒引脚不再使用冗长的X多少,彻底固定为A0-B15。这样就不用自己做黑盒了,可以直接使用该品牌官网提供的EPLAN。
IO模块标识:M01U02(耦合器M01,插槽U02)
IO表中的注释:添加到引脚功能文本
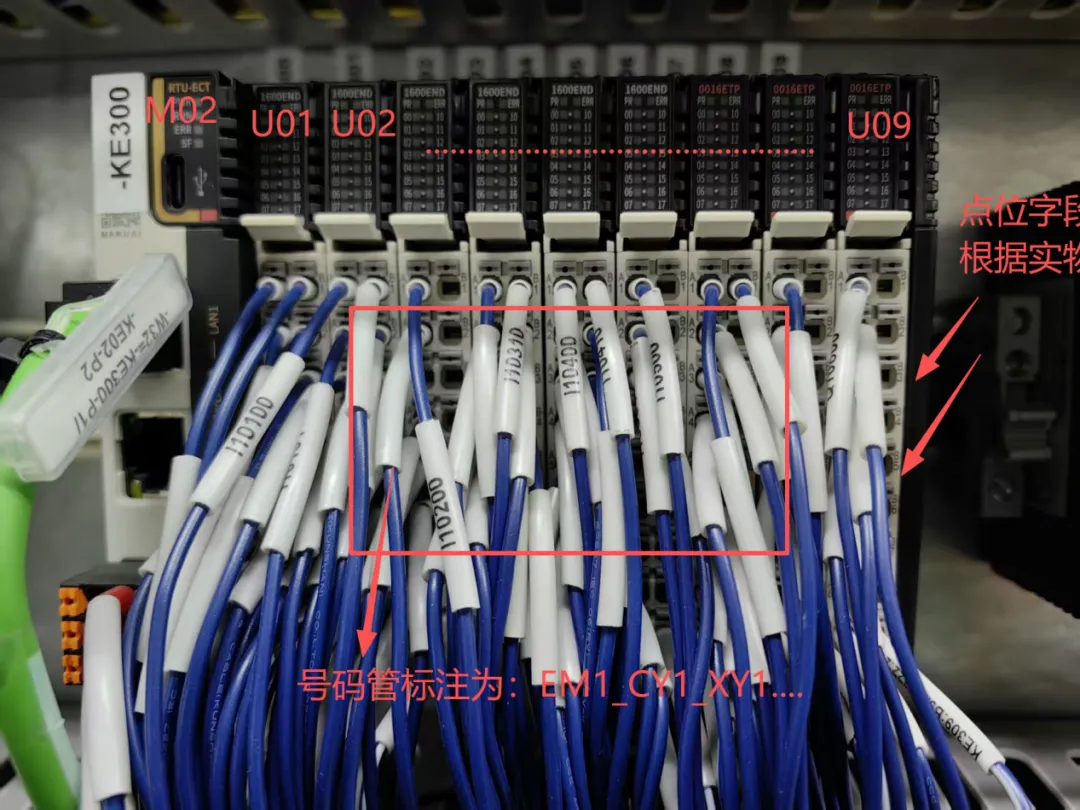
实物标识:耦合器贴M01,插槽贴U02,点位按实物标识
图纸示意如图:
(Eplan截图)实物示意如图:
(实物图)3、程序实现
上面的IO表和图纸,已经做到了完全的物理层。程序中只需要对物理层进行一次耦合——仅此一次,此后所有映射程序都不用改动。
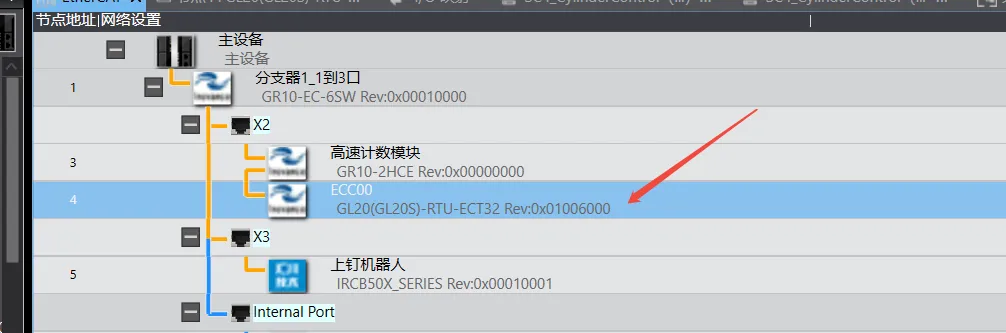
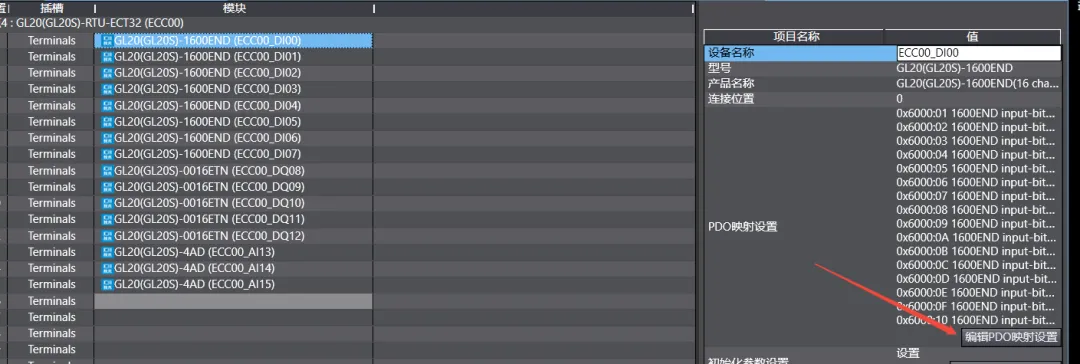
① 插入耦合器/主站组态
(组态截图)② 编辑模块PDO配置
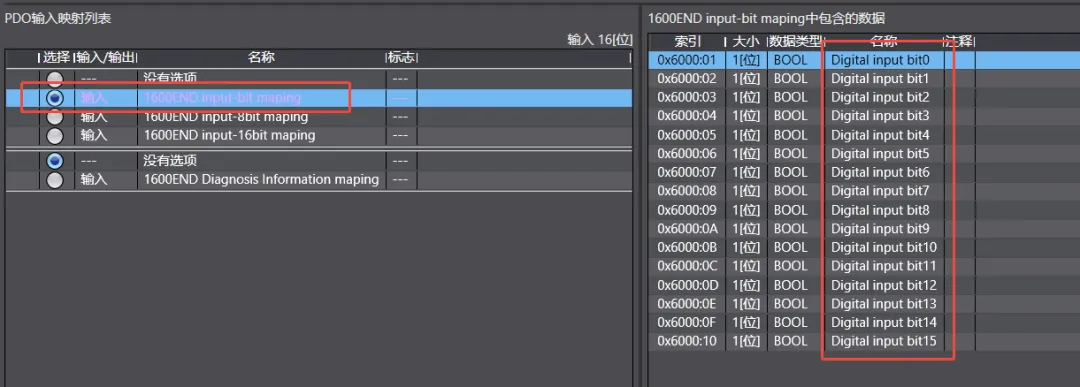
(模块配置截图)③这里需要选择纯BOOL配置,因为我们要对每个点直接映射到后续的FB块。如果选择字节类型,会产生二次中转。
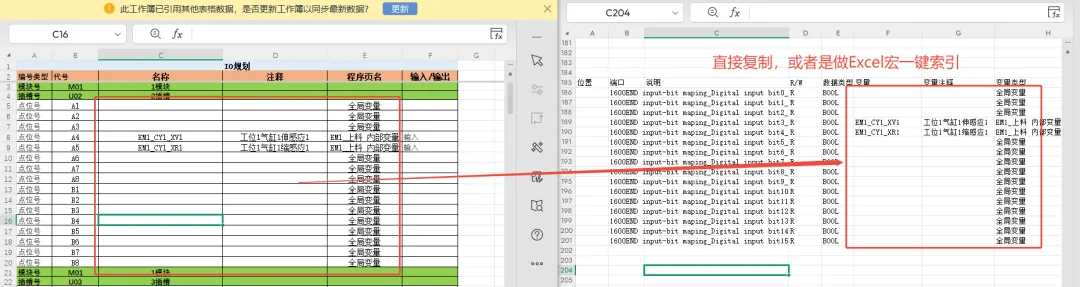
(PDO截图)④借助IO表进行快捷操作。其实可以通过Excel宏一键转换成欧姆龙格式。目前Excel宏还没来得及做(本人对Excel宏也不精通,大部分靠AI生成)。类似这种表格模板替换,可以这样训练AI:
“先告诉AI有A表B表,A表表头是……,B表表头是……。B表需要将A表中‘点位编号’行、‘名称’列的数据,放置到B表的‘变量’列、‘插槽’行下。”
这是整理好、可直接复制到欧姆龙IO映射中的示例如图:
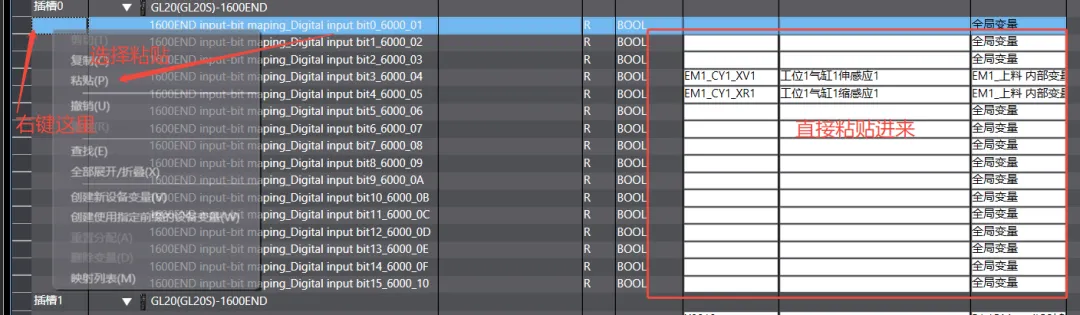
(整理后的IO表)⑤粘贴进欧姆龙PLC,如图:
(粘贴过程截图)⑥调用气缸FB,这里我用梯形图展示引脚关联,清晰直观:
(梯形图调用)可以看到,直接利用平台功能填写引脚,就完成了与物理点位的耦合。
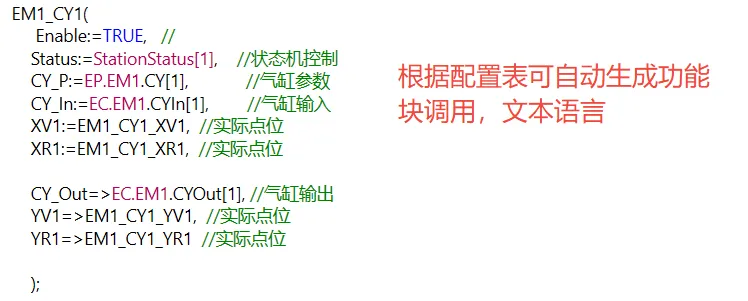
建议:还是使用ST文本语言调用。这样我们可以在Excel中做文章——通过设备配置表索引工位号、气缸号,自动生成FB调用代码,粘贴进PLC即可。ST如图:
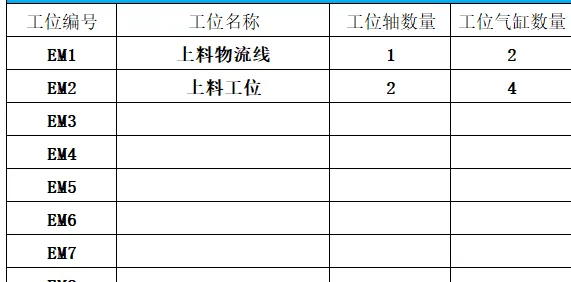
(文本语言调用)只需要有这样一张设备配置表,索引其工位号,气缸号,便可以自动生成这些实例,粘贴到PLC,PLC注册变量即可:
(配置表截图)⑦程序内部解耦,有人可能会问:为什么还有CY_IN、CY_OUT?
这是对实际物理点位的极致解耦。好处是:
后续查找问题时,可以直接索引EC.EM1.CYIn[1].Sensor这类结构体变量,无需找物理点位名称
HMI做界面块时,可以直接使用结构体封装,一个模板搞定所有气缸,关于气缸的控制过程具体实现,再此不占用过多篇幅,如何控制,监控,报警,各家公司都有这自己的一套过程,如果您的公司目前气缸控制还没有封装,后面建议封装成过程块,过程点位作为形参,由功能块实例写入
对与硬件耦合,功能块内部其实就是一层映射,将物理点位映射到CY_IN、CY_OUT,如图:
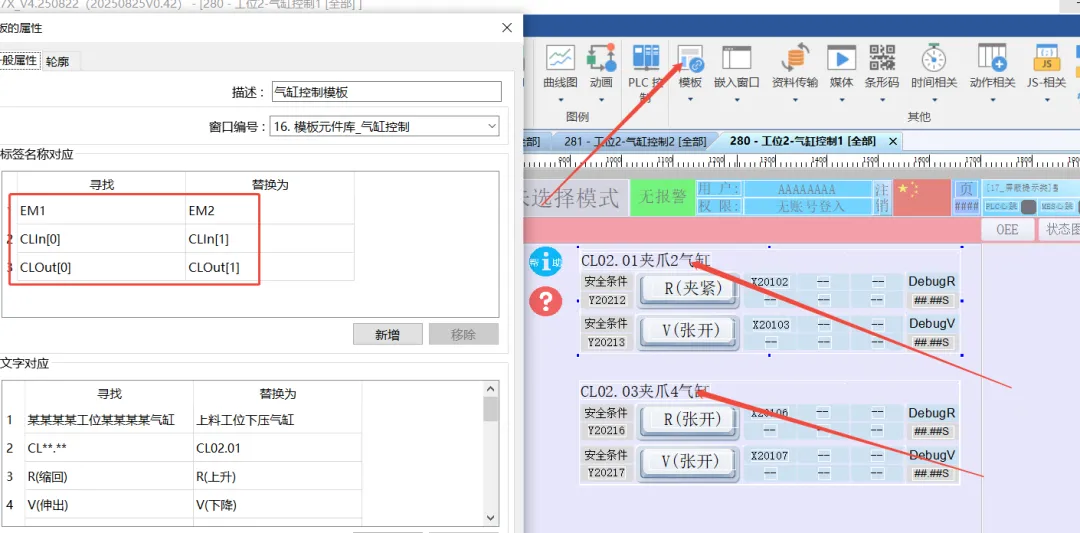
(程序内部截图)⑧HMI界面,HMI中继续使用EM1.CYIn、EM1.CYOut、EM1.CY这些结构体做模板界面。调用模板时,只需更改工位号、气缸号,就能快速生成多个气缸界面:
(HMI截图)欧姆龙的触摸屏支持IAG块,可实现相同功能。其他品牌触摸屏也有相似功能。关键在于——描述气缸的结构体必须规范统一。
三、总结
回顾整个改造过程,我们实现了这样一条路径:
开始→物理点(M01U02A3)
→业务名称(EM1_CY1_XV1)
→由此后面开始已经封装完成
→结构体成员(EC.EM1.CYIn[1].Sensor_V)
→ HMI模板(EM1.CYIn)
每一步都遵循同一个原则:只描述一次,只耦合一次。
物理点的位置信息,只在IO表和图纸中描述
业务名称,只在IO映射时与物理点关联一次
结构体封装,为上层逻辑提供统一接口
HMI模板,基于结构体一键生成
这就像我们开头的冰箱比喻——“打开冰箱放动物”这个逻辑只写一次,至于冰箱是胖是高、动物是大象还是长颈鹿,全交给配置去描述。
文章仅以气缸为对象,对于设备急停,设备风扇,设备门禁,工位过程,等等都是一样的思路。
感谢万泉河老师的留言启发,也感谢那些在评论区激烈讨论的同行们。所谓“过程控制”与“非标自动化”的分界线,其实只是我们给自己设的限。跳出技术手段,从更高维度看问题,你会发现:
所谓控制,归根结底都是对象的控制。所谓过程,归根结底都可以封装。
最后,说些题外话
今天是我和女朋友在一起521天的纪念日。感谢她一直以来的陪伴和支持,做项目的时候,总是被图纸、程序、出差调试填满,疏于对她的陪伴。回过头想,女朋友一直在背后支撑着我——程序卡壳的时候,出差累到不想动的时候,她的鼓励和温柔,总能让我重新找回状态。
生活中不只有工作,还有爱你的,和你爱的人更加需要珍惜,一起规划未来,一起努力进步,好好对待彼此。
所以这篇文章,也送给所有在背后支持工程师的人。
祝大家生活愉快,工作顺心。