车载以太网是车载底层通信基础设施,OpenClaw 是上层 AI 智能体执行框架,二者是“通信通道” 与 “应用逻辑”的分层关系:OpenClaw 依赖车载以太网实现车内外数据交互与控制指令下发,车载以太网为 OpenClaw 提供高带宽、实时、安全的网络传输保障。
一、核心概念速览
1. 车载以太网(Linux 网络核心)
- 定位:汽车电子电气架构的高速骨干通信网络,替代传统 CAN/LIN,满足智能座舱、自动驾驶、OTA 的高带宽、低时延需求。
- 关键协议栈(Linux 网络层):
- 物理层:100BASE-T1/1000BASE-T1(IEEE 802.3)
- 数据链路:TSN(时间敏感网络,802.1AS/Qav)、MACsec
- 网络 / 传输:IPv4/IPv6、TCP/UDP
- 应用层:SOME/IP(服务化通信)、DoIP(诊断)、AVTP(音视频)
- Linux 角色:作为车载域控制器(座舱 / 智驾 / 中央计算)的 OS,负责协议栈实现、网卡驱动、网络配置、QoS 与安全。
2. OpenClaw(AI 智能体框架)
- 定位:开源、本地优先的AI 任务执行引擎,核心是 “意图解析→任务拆解→工具调用→结果反馈” 闭环,可直接操作系统与硬件。
- 车载场景价值:作为座舱 / 智驾的智能交互中枢,处理多模态指令(语音 / 触控 / 手势),跨域协同(座舱→智驾→车控),实现场景化自动执行。
二、二者的核心关系(Linux 网络视角)
1. 依赖关系:OpenClaw “跑在” 车载以太网上
- 数据通道:OpenClaw 的指令、状态、模型推理结果,必须通过车载以太网(SOME/IP/DoIP/IP) 传输到各 ECU / 域控制器。
- Linux 网络层支撑:
- 网卡驱动:BroadR-Reach、100BASE-T1 PHY 驱动(Linux 内核 / 用户态)。
- 协议栈:Linux 内核实现 TCP/IP、TSN、SOME/IP(用户态中间件),为 OpenClaw 提供socket 通信、服务发现、时间同步能力。
- 网络配置:DHCP / 静态 IP、VLAN、路由、防火墙(iptables/nftables),保障 OpenClaw 网络可达与安全。
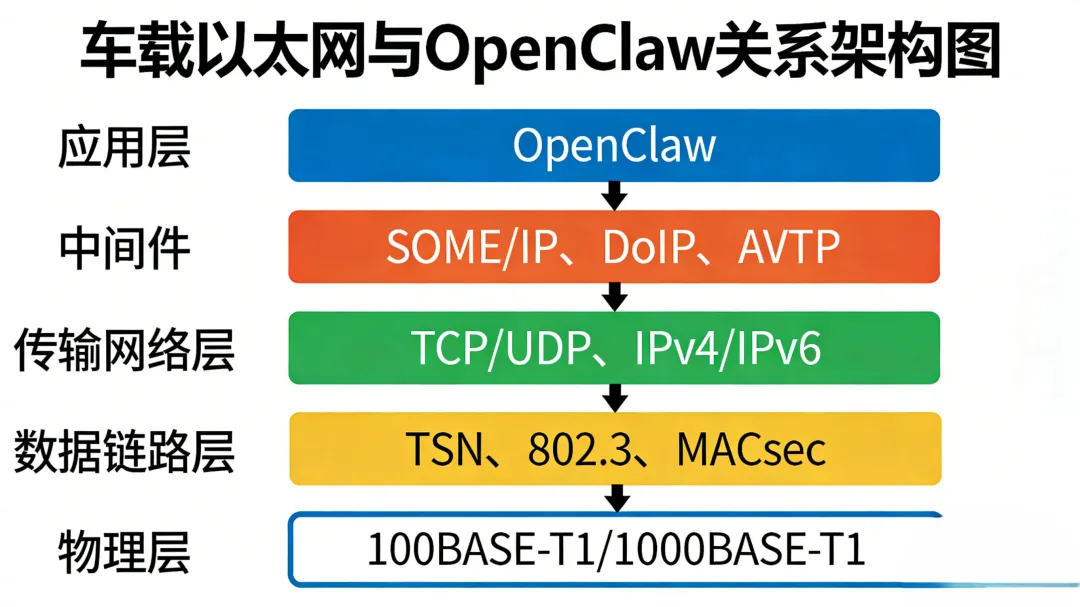
2. 架构分层:清晰的上下位关系
┌─────────────────────────────────┐│ 应用层:OpenClaw(AI智能体、任务编排)│├─────────────────────────────────┤│ 中间件:SOME/IP、DoIP、AVTP │├─────────────────────────────────┤│ 传输/网络层:TCP/UDP、IPv4/IPv6 │ ← Linux内核网络栈├─────────────────────────────────┤│ 数据链路:TSN、802.3、MACsec │├─────────────────────────────────┤│ 物理层:100BASE-T1/1000BASE-T1 │└─────────────────────────────────┘
- 车载以太网:提供底层通信能力(传输、时序、安全),是 OpenClaw 的 “高速公路”。
- OpenClaw:构建上层应用逻辑(智能交互、任务执行),是跑在 “高速公路” 上的 “智能车辆”。
3. 协同场景(Linux + 车载以太网 + OpenClaw)
- 智能座舱控制:OpenClaw 解析 “打开空调 + 导航回家”→通过 SOME/IP 发指令→车载以太网传输→座舱域 / 车身域 ECU 执行。
- 自动驾驶协同:OpenClaw 处理 “自动泊车”→通过 TSN 实时下发控制指令→车载以太网低时延传输→智驾域 / 底盘域执行。
- OTA 与诊断:OpenClaw 触发 OTA→DoIP 通过车载以太网高速刷写 ECU 固件→Linux 网络层保障传输可靠性。
三、Linux 在其中的关键作用(网络知识点)
- 协议栈实现:Linux 内核完整实现车载以太网协议族(TCP/IP、TSN、MACsec),用户态部署 SOME/IP、DoIP 中间件。
- 驱动与硬件抽象:管理车载以太网 PHY/MAC 驱动,提供统一网络接口(eth0、can0 映射),屏蔽硬件差异。
- QoS 与实时性:通过tc(流量控制)、cgroup、内核抢占,保障 TSN 流(如自动驾驶)的低时延、高优先级。
- 网络安全:iptables/nftables 防火墙、IPsec、SOME/IP-Security,防护 OpenClaw 通信与车内外边界。
- 服务发现与路由:基于 Linux 网络配置,实现 SOME/IP 服务发现、多域路由,支撑 OpenClaw 跨节点通信。
四、总结
- 本质关系:车载以太网是通信基础设施,OpenClaw 是上层应用框架,Linux 是二者的操作系统与网络栈载体。
- 技术要点:
- OpenClaw 依赖 Linux 实现的车载以太网协议栈完成数据交互;车载以太网通过 Linux 的网络能力保障 OpenClaw 的实时、可靠、安全运行。