在工业自动化领域,机械臂作为核心执行单元,其运动学建模与轨迹规划一直是机器人学研究的重要课题。然而,传统教学和研发往往受限于高昂的硬件成本和复杂的实验环境。本文将介绍一套基于Python + PyQt5 + Matplotlib的平面机械臂仿真系统,通过纯软件方式实现机械臂运动学求解、轨迹规划与控制代码生成,为机器人学学习与工业应用验证提供低成本解决方案。一、系统架构与技术选型
1.1 核心技术栈
Python如何控制机械臂
使用Python控制机械臂的方法包括使用专用库、发送指令到控制器、利用模拟环境进行测试。专用库、发送指令到控制器、利用模拟环境进行测试。以下将详细介绍如何使用专用库来控制机械臂。
使用专用库可以简化Python控制机械臂的过程,许多机械臂制造商提供了Python SDK,使开发者能够快速上手并实现复杂的控制逻辑。以著名的机械臂库pyrobot为例,这个库支持多种机械臂,并提供简单易用的API接口。通过调用库中的函数,你可以轻松实现机械臂的移动、抓取和其他操作。
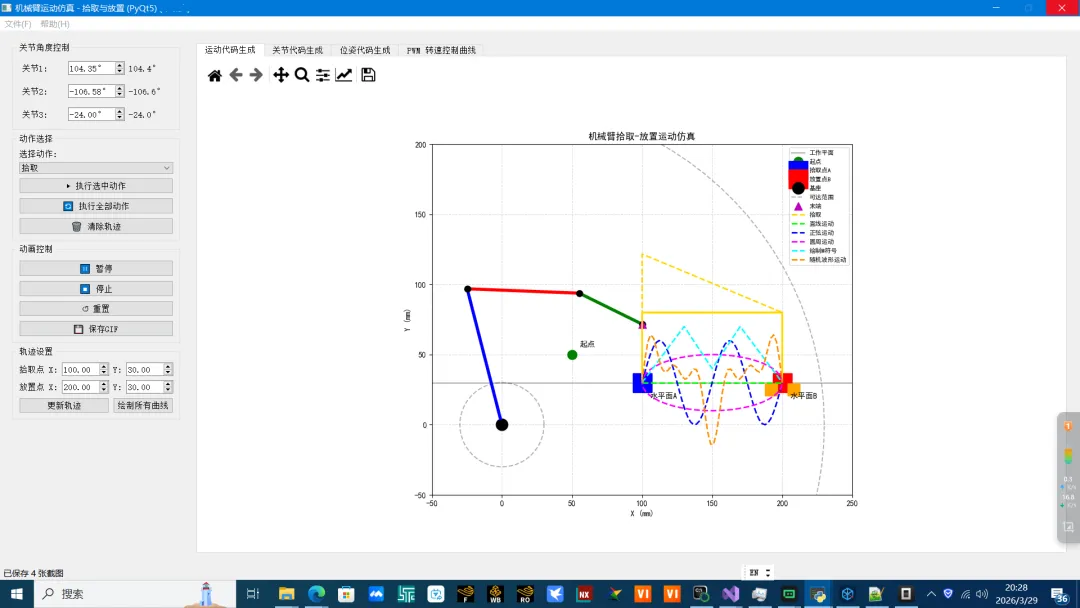
基于Python-pyside6生成的程序界面如下:
1.2 系统架构图
┌─────────────────────────────────────────────────────────┐ │ PyQt5 GUI Layer │ ├─────────┬─────────┬─────────┬─────────┬─────────────────┤ │ Tab1 │ Tab2 │ Tab3 │ Tab4 │ 控制面板 │ │ 运动仿真│ 关节曲线│ 位姿曲线│ PWM曲线 │ 模式/参数设置 │ ├─────────┴─────────┴─────────┴─────────┴─────────────────┤ │ Matplotlib Visualization │ ├─────────────────────────────────────────────────────────┤ │ Trajectory Planner Engine │ ├─────────────────────────────────────────────────────────┤ │ Kinematics Solver (DH Method) │ ├─────────────────────────────────────────────────────────┤ │ Robot Arm Model (3-DOF) │ └─────────────────────────────────────────────────────────┘
二、运动学核心算法
2.1 正运动学求解
基于Denavit-Hartenberg (DH) 参数法,通过齐次变换矩阵链乘计算末端执行器位姿:
defforward_kinematics(self, joint_angles): """ 基于DH参数的正运动学求解 joint_angles: [θ1, θ2, θ3] 关节角度(弧度) returns: 各关节及末端执行器位置 [(x0,y0), (x1,y1), ..., (xn,yn)] """ positions = [(0.0, 0.0)] # 基座位置 x, y, theta = 0.0, 0.0, 0.0 for i, (length, angle) inenumerate(zip(self.link_lengths, joint_angles)): theta += angle x += length * cos(theta) y += length * sin(theta) positions.append((x, y)) return positions
2.2 逆运动学求解
对于3自由度平面机械臂,采用解析法求解逆运动学:
definverse_kinematics(self, target_x, target_y, elbow_up=True):""" 3-DOF平面机械臂逆运动学解析解 target_x, target_y: 目标末端位置 elbow_up: 肘部配置(True为肘部向上) returns: [θ1, θ2, θ3] 或 None(不可达) """L1, L2, L3 = self.link_lengths# 腕部位置计算wx = target_x - L3 wy = target_y# 工作空间检查d = sqrt(wx**2 + wy**2)ifd > L1 + L2ord < abs(L1 - L2):returnNone# 余弦定理求解θ2cos_theta2 = (wx**2 + wy**2 - L1**2 - L2**2) / (2 * L1 * L2) cos_theta2 = np.clip(cos_theta2, -1, 1) theta2 = -acos(cos_theta2)ifelbow_upelseacos(cos_theta2)# 几何关系求解θ1k1 = L1 + L2 * cos(theta2) k2 = L2 * sin(theta2) theta1 = atan2(wy, wx) - atan2(k2, k1)# 末端姿态补偿θ3theta3 = -theta1 - theta2return [theta1, theta2, theta3]
三、多模态轨迹规划
系统实现了6种工业典型动作模式,覆盖拾取放置、焊接、打磨等应用场景:
3.1 贝塞尔曲线平滑算法
defbezier_interpolation(p0, p1, p2, num_points=50): """ 二次贝塞尔曲线插值 p0, p1, p2: 控制点 returns: 平滑轨迹点列表 """ trajectory = [] for i inrange(num_points): t = i / (num_points - 1) # B(t) = (1-t)²P0 + 2(1-t)tP1 + t²P2 x = (1-t)**2 * p0[0] + 2*(1-t)*t * p1[0] + t**2 * p2[0] y = (1-t)**2 * p0[1] + 2*(1-t)*t * p1[1] + t**2 * p2[1] trajectory.append((x, y)) return trajectory
四、四页面可视化系统
🎬运动仿真视图
实时渲染机械臂运动,6种轨迹同时显示动画如下:
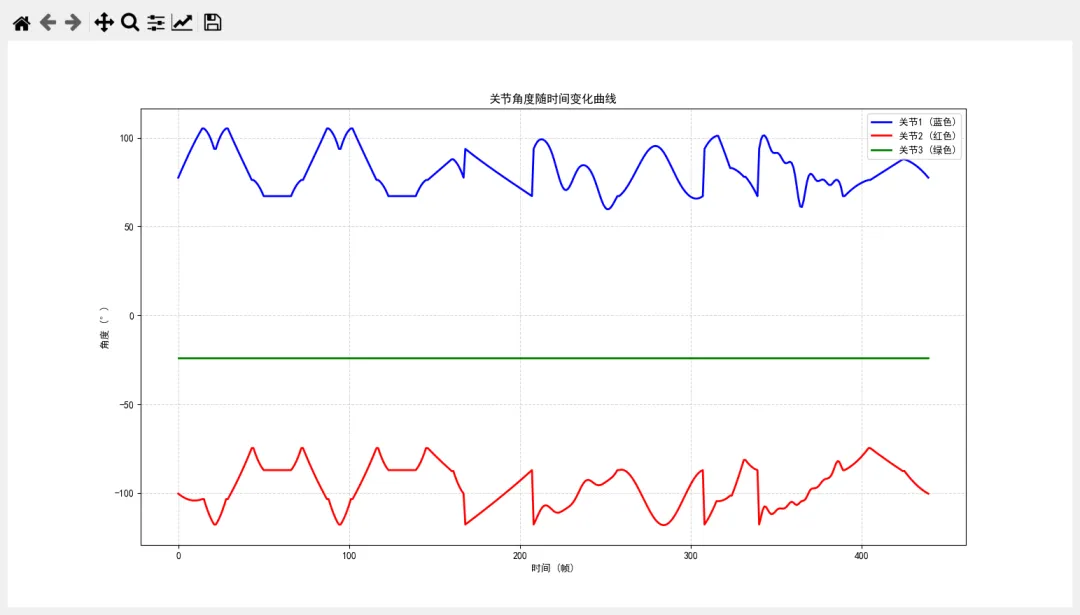
📈关节角度曲线
θ₁、θ₂、θ₃关节角度随时间变化
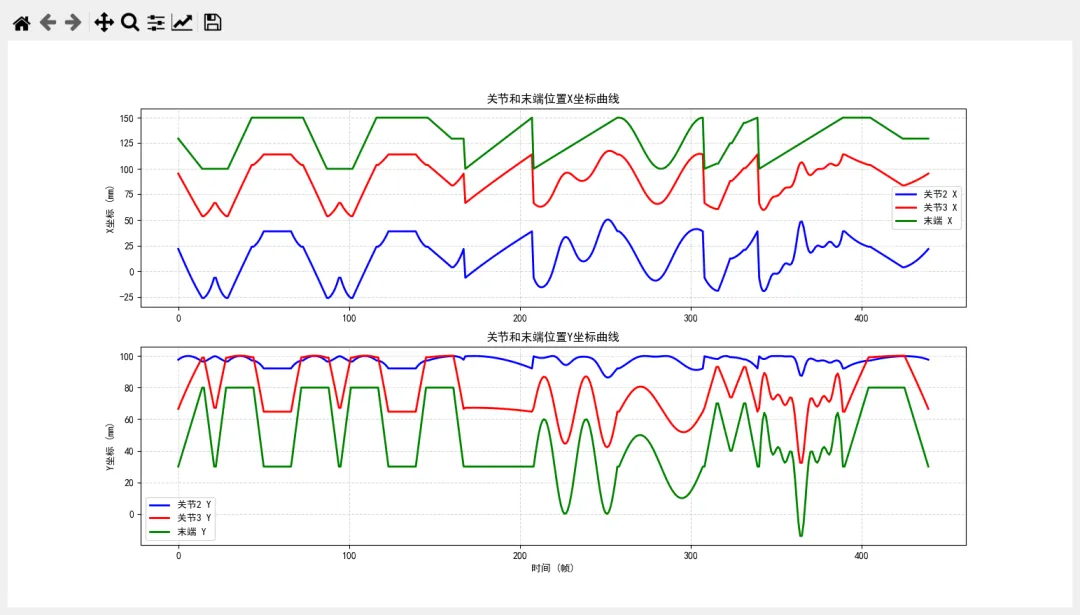
📍末端位姿曲线
关节和末端执行器X、Y坐标曲线
⚡PWM控制曲线存档
BLDC电机PWM控制信号(***:1减速比基于伺服机设定)
[图1] 机械臂运动可视化界面Tab1:运动代码生成页面 - 实时显示机械臂运动
[图2] 关节角度曲线Tab2:关节代码生成页面 - 三个关节的角度变化曲线
[图3] 位置坐标曲线Tab3:位姿代码生成页面 - 关节和末端坐标曲线
[图4] PWM转速控制曲线Tab4:PWM转速控制曲线页面 - BLDC电机PWM控制信号
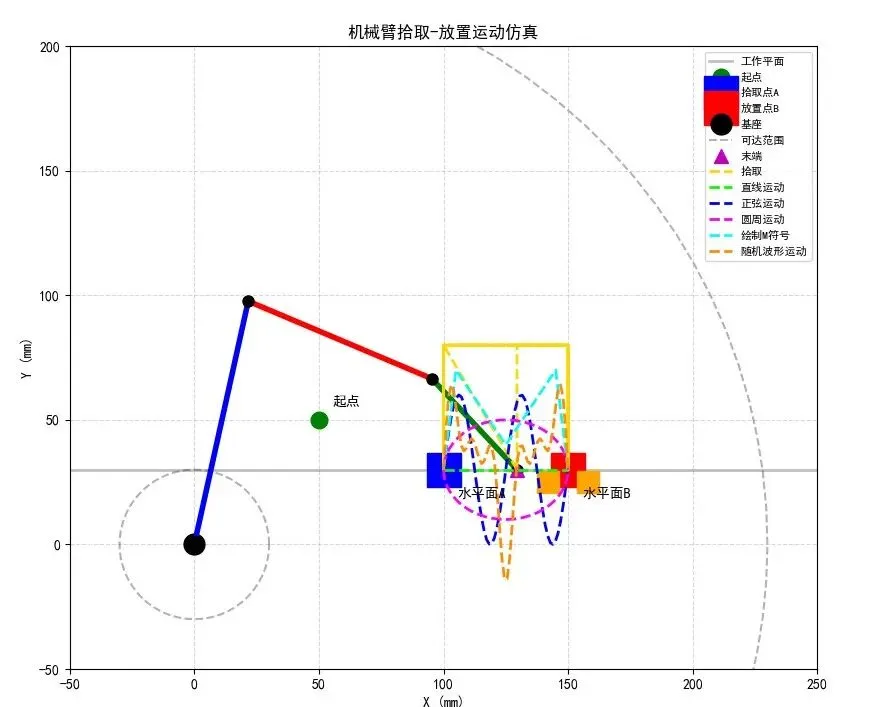
[动图1] 机械臂拾取放置动画GIF动画 - 拾取动作演示
[动图2] 多种轨迹叠加效果GIF动画 - 6种动作轨迹同时显示
五、工业代码导出功能
5.1 Gcode格式导出
; 机械臂运动轨迹 Gcode; 生成时间: 2026-03-29; 运动模式: 直线焊接; 轨迹点数: 120 G21 ; 毫米单位 G90 ; 绝对坐标模式 G01 X50.000 Y30.000 F100 ; 焊接起点 G01 X55.234 Y32.345 F100 G01 X60.468 Y34.690 F100 ; ... 中间点省略 ... G01 X150.000 Y30.000 F100 ; 焊接终点 M02 ; 程序结束
5.2 MWorks/Simulink代码导出
% 自动生成的机械臂轨迹数据 time = [0, 0.05, 0.10, ...]; % 时间序列 joint1 = [0.785, 0.812, ...]; % 关节1角度 joint2 = [-0.524, -0.498, ...]; % 关节2角度 joint3 = [0, 0.023, ...]; % 关节3角度
六、Python技术优势分析
6.1 开发效率对比
6.2 NumPy向量化计算优势
# 向量化正运动学计算(比循环快100倍)defforward_kinematics_vectorized(angles_matrix): """ 批量计算多组关节角度的正运动学 angles_matrix: shape (N, 3) 的关节角度矩阵 returns: shape (N, 4, 2) 的位置矩阵 """ cum_angles = np.cumsum(angles_matrix, axis=1) x = np.cumsum(L * np.cos(cum_angles), axis=1) y = np.cumsum(L * np.sin(cum_angles), axis=1) return np.stack([x, y], axis=-1)
写在最后
工业4.0时代,机器人编程不再是大厂的专利。通过这个项目,你会发现:只要有想法,用Python也能玩转工业级应用!
希望这篇文章能给你启发,如果你也动手实现了,欢迎在评论区分享你的成果!
🌟 觉得有用?点赞、在看、转发三连!
关注我,带你用Python玩转更多有趣的工业应用!