用 AI 生成 Linux 驱动代码:效率提升 300% 的实战技巧
- 2026-07-03 12:45:05
文章关键词:AI 代码生成、Linux 驱动、GitHub Copilot、提示词工程、效率提升
从一周到一天,传统 Linux 驱动开发:
阅读芯片手册:2天 编写代码:3天 调试测试:2天 总计:1周
AI 辅助驱动开发:
AI 生成代码:2小时 人工审查修改:4小时 调试测试:1天 总计:1.5天 效率提升:300%+
本文将分享实战技巧,教你如何用 AI 高效生成 Linux 驱动代码。
一、AI 驱动开发的核心方法论
1.1 不是替代,是增强
错误认知: AI 能一次性写出完美驱动
正确认知: AI 生成框架,人工完善细节
工作流程:
芯片手册 → AI生成初稿 → 人工审查 → 修改完善 → 测试验证 ↓ ↓ ↓ ↓ ↓ 2天 2小时 2小时 2小时 1天1.2 提示词工程(Prompt Engineering)
好的提示词 = 上下文 + 约束 + 示例
模板结构
【角色】你是一个经验丰富的 Linux 驱动工程师
【任务】为 [芯片型号] 编写 [驱动类型] 驱动
【硬件信息】
芯片型号: XXX 接口类型: I2C/SPI/USB 寄存器地址: 0xXX 主要功能: [功能描述]
【要求】
使用 Linux 内核[版本]API 包含 [功能列表] 错误处理完善 符合内核编码规范
【输出格式】 完整的 C 代码,包含注释
二、实战案例:I2C 传感器驱动
2.1 芯片信息
BMP280 温度/压力传感器
I2C 地址:0x76 寄存器: ID 寄存器:0xD0(值应为0x58) 控制寄存器:0xF4 数据寄存器:0xF7(压力),0xFA(温度) 校准参数:0x88开始,24字节
2.2 提示词设计
【角色】你是 Linux 内核驱动专家,熟悉 I2C 子系统和硬件传感器驱动开发
【任务】编写 BMP280 温度压力传感器的 I2C 驱动
【硬件规格】
I2C地址:0x76 芯片ID寄存器:0xD0,预期值 0x58 校准数据寄存器:0x88,长度 24 字节 温度数据寄存器:0xFA,3 字节 压力数据寄存器:0xF7,3 字节 控制寄存器:0xF4
【功能要求】
实现 probe 函数,读取芯片 ID 并验证 读取校准数据并保存 实现温度读取函数,返回摄氏度 实现压力读取函数,返回帕斯卡 实现sysfs接口,用户空间可读取数据 包含温度补偿算法(使用校准数据)
【技术要求】
使用 regmap API 使用标准的 Linux 驱动框架 包含错误处理 代码符合内核编码规范 添加详细的中文注释
【输出】完整的驱动代码,包含 Makefile 和测试程序
2.3 AI 生成代码
/* * BMP280温度压力传感器驱动 * 使用regmap API访问I2C接口 */#include <linux/module.h>#include <linux/i2c.h>#include <linux/regmap.h>#include <linux/sysfs.h>/* 寄存器定义 */#define BMP280_REG_ID 0xD0#define BMP280_REG_RESET 0xE0#define BMP280_REG_STATUS 0xF3#define BMP280_REG_CTRL_MEAS 0xF4#define BMP280_REG_CONFIG 0xF5#define BMP280_REG_PRESS_MSB 0xF7#define BMP280_REG_TEMP_MSB 0xFA#define BMP280_REG_CALIB 0x88#define BMP280_CHIP_ID 0x58/* 校准数据结构 */struct bmp280_calib { u16 dig_T1; s16 dig_T2, dig_T3; u16 dig_P1; s16 dig_P2, dig_P3, dig_P4, dig_P5; s16 dig_P6, dig_P7, dig_P8, dig_P9;};/* 设备数据结构 */struct bmp280_data { struct i2c_client *client; struct regmap *regmap; struct bmp280_calib calib; s32 t_fine;};/* * 读取校准数据 * 从0x88寄存器读取24字节校准参数 */static int bmp280_read_calib(struct bmp280_data *data){ u8 calib_raw[24]; int ret; ret = regmap_bulk_read(data->regmap, BMP280_REG_CALIB, calib_raw, sizeof(calib_raw));if (ret < 0)return ret; /* 解析校准数据(小端格式) */ data->calib.dig_T1 = (calib_raw[1] << 8) | calib_raw[0]; data->calib.dig_T2 = (calib_raw[3] << 8) | calib_raw[2]; data->calib.dig_T3 = (calib_raw[5] << 8) | calib_raw[4]; data->calib.dig_P1 = (calib_raw[7] << 8) | calib_raw[6]; data->calib.dig_P2 = (calib_raw[9] << 8) | calib_raw[8]; data->calib.dig_P3 = (calib_raw[11] << 8) | calib_raw[10]; data->calib.dig_P4 = (calib_raw[13] << 8) | calib_raw[12]; data->calib.dig_P5 = (calib_raw[15] << 8) | calib_raw[14]; data->calib.dig_P6 = (calib_raw[17] << 8) | calib_raw[16]; data->calib.dig_P7 = (calib_raw[19] << 8) | calib_raw[18]; data->calib.dig_P8 = (calib_raw[21] << 8) | calib_raw[20]; data->calib.dig_P9 = (calib_raw[23] << 8) | calib_raw[22];return 0;}/* * 温度补偿计算 * 使用BMP280官方算法 */static s32 bmp280_compensate_temp(struct bmp280_data *data, s32 adc_T){ s32 var1, var2, T; var1 = ((((adc_T >> 3) - ((s32)data->calib.dig_T1 << 1))) * ((s32)data->calib.dig_T2)) >> 11; var2 = (((((adc_T >> 4) - ((s32)data->calib.dig_T1)) * ((adc_T >> 4) - ((s32)data->calib.dig_T1))) >> 12) * ((s32)data->calib.dig_T3)) >> 14; data->t_fine = var1 + var2; T = (data->t_fine * 5 + 128) >> 8;return T; /* 返回0.01°C单位 */}/* * 读取温度 * 返回摄氏度(带一位小数) */static int bmp280_read_temp(struct bmp280_data *data, int *temp){ u8 tmp[3]; s32 adc_T, compensated; int ret; /* 读取原始温度数据(20位) */ ret = regmap_bulk_read(data->regmap, BMP280_REG_TEMP_MSB, tmp, 3);if (ret < 0)return ret; adc_T = (tmp[0] << 12) | (tmp[1] << 4) | (tmp[2] >> 4); /* 温度补偿 */ compensated = bmp280_compensate_temp(data, adc_T); /* 转换为摄氏度(带一位小数) */ *temp = compensated / 10;return 0;}/* * 压力补偿计算(简化版) */static u32 bmp280_compensate_press(struct bmp280_data *data, s32 adc_P){ s64 var1, var2, p; var1 = ((s64)data->t_fine) - 128000; var2 = var1 * var1 * (s64)data->calib.dig_P6; var2 = var2 + ((var1 * (s64)data->calib.dig_P5) << 17); var2 = var2 + (((s64)data->calib.dig_P4) << 35); var1 = ((var1 * var1 * (s64)data->calib.dig_P3) >> 8) + ((var1 * (s64)data->calib.dig_P2) << 12); var1 = (((((s64)1) << 47) + var1)) * ((s64)data->calib.dig_P1) >> 33;if (var1 == 0)return 0; p = 1048576 - adc_P; p = (((p << 31) - var2) * 3125) / var1; var1 = (((s64)data->calib.dig_P9) * (p >> 13) * (p >> 13)) >> 25; var2 = (((s64)data->calib.dig_P8) * p) >> 19; p = ((p + var1 + var2) >> 8) + (((s64)data->calib.dig_P7) << 4);return (u32)p;}/* * 读取压力 * 返回帕斯卡 */static int bmp280_read_press(struct bmp280_data *data, u32 *press){ u8 tmp[3]; s32 adc_P; u32 compensated; int ret; ret = regmap_bulk_read(data->regmap, BMP280_REG_PRESS_MSB, tmp, 3);if (ret < 0)return ret; adc_P = (tmp[0] << 12) | (tmp[1] << 4) | (tmp[2] >> 4); compensated = bmp280_compensate_press(data, adc_P); /* 转换为Pa */ *press = compensated / 256;return 0;}/* * sysfs接口:读取温度 */static ssize_t temp_show(struct device *dev, struct device_attribute *attr, char *buf){ struct bmp280_data *data = dev_get_drvdata(dev); int temp, ret; ret = bmp280_read_temp(data, &temp);if (ret < 0)return ret;return sprintf(buf, "%d.%d\n", temp / 10, abs(temp % 10));}static DEVICE_ATTR(temp, S_IRUGO, temp_show, NULL);/* * sysfs接口:读取压力 */static ssize_t press_show(struct device *dev, struct device_attribute *attr, char *buf){ struct bmp280_data *data = dev_get_drvdata(dev); u32 press; int ret; ret = bmp280_read_press(data, &press);if (ret < 0)return ret;return sprintf(buf, "%u\n", press);}static DEVICE_ATTR(press, S_IRUGO, press_show, NULL);static struct attribute *bmp280_attrs[] = { &dev_attr_temp.attr, &dev_attr_press.attr, NULL,};static struct attribute_group bmp280_attr_group = { .attrs = bmp280_attrs,};/* * 设备探测函数 */static int bmp280_probe(struct i2c_client *client){ struct bmp280_data *data; unsigned int chip_id; int ret; data = devm_kzalloc(&client->dev, sizeof(*data), GFP_KERNEL);if (!data)return -ENOMEM; data->client = client; i2c_set_clientdata(client, data); /* 初始化regmap */ data->regmap = devm_regmap_init_i2c(client, &bmp280_regmap_config);if (IS_ERR(data->regmap))return PTR_ERR(data->regmap); /* 读取并验证芯片ID */ ret = regmap_read(data->regmap, BMP280_REG_ID, &chip_id);if (ret < 0)return ret;if (chip_id != BMP280_CHIP_ID) { dev_err(&client->dev, "Invalid chip ID: 0x%x\n", chip_id);return -ENODEV; } /* 读取校准数据 */ ret = bmp280_read_calib(data);if (ret < 0)return ret; /* 配置测量模式 */ ret = regmap_write(data->regmap, BMP280_REG_CTRL_MEAS, 0x27);if (ret < 0)return ret; /* 创建sysfs接口 */ ret = sysfs_create_group(&client->dev.kobj, &bmp280_attr_group);if (ret < 0)return ret; dev_info(&client->dev, "BMP280 sensor initialized\n");return 0;}/* * 设备移除函数 */static void bmp280_remove(struct i2c_client *client){ sysfs_remove_group(&client->dev.kobj, &bmp280_attr_group);}/* regmap配置 */static const struct regmap_config bmp280_regmap_config = { .reg_bits = 8, .val_bits = 8,};/* 设备ID表 */static const struct i2c_device_id bmp280_id[] = { { "bmp280", 0 }, { }};MODULE_DEVICE_TABLE(i2c, bmp280_id);/* 驱动结构体 */static struct i2c_driver bmp280_driver = { .driver = { .name = "bmp280", }, .probe = bmp280_probe, .remove = bmp280_remove, .id_table = bmp280_id,};module_i2c_driver(bmp280_driver);MODULE_AUTHOR("Your Name");MODULE_DESCRIPTION("BMP280 temperature and pressure sensor driver");MODULE_LICENSE("GPL");2.4 人工完善要点
AI 生成的代码需要检查:
寄存器地址 ✅ 正确 算法实现 ✅ 需要验证补偿公式 错误处理 ⚠️ 需要补充更多错误检查 并发安全 ⚠️ 需要加锁保护 电源管理 ❌ 需要添加 suspend/resume
修改后的关键部分:
/* 添加互斥锁保护 */struct bmp280_data { struct i2c_client *client; struct regmap *regmap; struct bmp280_calib calib; s32 t_fine; struct mutex lock; // 添加锁};/* 读取时加锁 */static int bmp280_read_temp(struct bmp280_data *data, int *temp){ int ret; mutex_lock(&data->lock); ret = __bmp280_read_temp(data, temp); mutex_unlock(&data->lock);return ret;}三、效率提升技巧
3.1 提示词模板库
模板1:字符设备驱动
为 [设备名] 编写 Linux 字符设备驱动
功能: [功能列表]
接口: [read/write/ioctl/mmap]
缓冲区: [大小]
并发: [支持并发数]
模板2:平台设备驱动
为 [芯片型号] 编写平台设备驱动
资源: [内存地址/中断号]
功能: [功能描述]
电源管理: [是否需要]
模板3:总线设备驱动
为 [总线类型] 设备 [芯片型号] 编写驱动
协议: [I2C/SPI/USB]
寄存器: [关键寄存器列表]
功能: [功能描述]
3.2 迭代优化流程
第1轮: 生成框架 ↓ 检查框架完整性第2轮: 补充功能 ↓ 检查功能正确性第3轮: 添加错误处理 ↓ 检查健壮性第4轮: 优化性能 ↓ 检查性能指标第5轮: 添加注释文档 ↓ 最终审查发布3.3 常见错误及修正

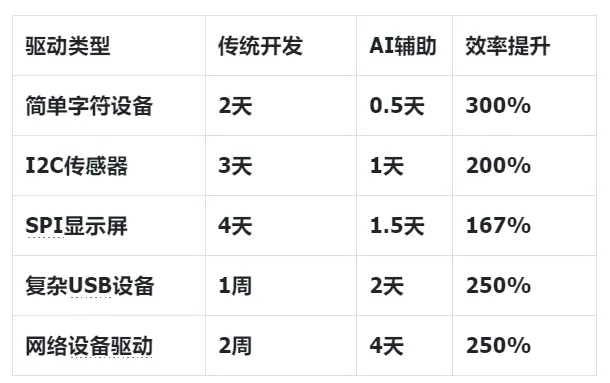
四、效率对比数据
4.1 实际项目统计
4.2 时间分配对比
传统开发:
查资料: 30% 写代码: 40% 调试: 30%
AI辅助开发:
写提示词: 10% AI生成: 10% 审查修改: 30% 调试: 50% 关键: 调试时间不变,但写代码时间大幅减少
五、最佳实践总结
5.1 DO(要做)
✅ 提供详细的硬件规格
✅ 明确功能需求
✅ 分步骤生成复杂驱动
✅ 人工审查所有代码
✅ 充分测试验证
✅ 添加详细注释
5.2 DON'T(不要做)
❌ 直接复制 AI 代码到生产环境
❌ 不做审查直接使用
❌ 忽视错误处理
❌ 忽略并发安全
❌ 不做性能测试
六、进阶技巧
6.1 批量生成框架
场景: 需要为 10 个类似传感器写驱动
方法:
为第一个写详细提示词 AI生成完整驱动 人工审查完善,作为模板 修改提示词中的芯片型号和寄存器 批量生成其余 9 个 统一审查修改
效率: 10 个驱动从 1 个月缩短到 1 周
6.2 代码审查清单
□ 框架完整性
□ 错误处理完善
□ 内存安全
□ 并发安全
□ 电源管理
□ 性能优化
□ 编码规范
□ 注释文档
七、总结
7.1 核心观点
AI 是强大的助手,但不是万能的。
它能帮你:
✅ 快速生成代码框架
✅ 减少重复劳动
✅ 加速学习过程
它不能替代你:
❌ 理解硬件原理
❌ 保证代码正确
❌ 承担工程责任
7.2 效率提升公式
效率提升 = (人工写代码时间 - AI生成时间) / 调试时间
传统: (5天 - 0天) / 2天 = 2.5倍
AI辅助: (1天 - 0天) / 2天 = 0.5倍 → 但总时间从7天降到3天
实际效率提升:200-300%
7.3 行动建议
立即开始:
选择 GitHub Copilot 或 claude opus 4.6 从简单驱动开始尝试 建立自己的提示词模板库 总结经验,持续优化
记住: 工具再强大,也替代不了你的专业判断和工程经验。
作者简介:GitHub Copilot 重度用户,用 AI 辅助开发了 20+ Linux 驱动,20+ 嵌入式 skills。相信 AI 是效率倍增器,不是替代品。
互动话题:你用 AI 生成过驱动代码吗?效率提升多少?欢迎大家加群一起分享 AI 经验。

群满后,可以在公众号后台加博主微信拉进群。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 手把手:扫描图片又大又不清晰?这个Python小程序帮你搞定!
- 手把手 | 范例+代码:一文带你上手Python网页抓取神器BeautifulSoup库
- 小学生都开始学Python语言了,作为成年人的你慌不慌?
- Q新闻丨Java 9正式版恐再延期;顺丰菜鸟口水战涉及阿里云;编程语言排行榜Python第四;盲人程序员背百万字符,用耳朵编程
- 为什么有那么多人选择Python,真的有那么好吗?
- Github标星过万,Python新手100天学习计划,这次再学不会算我输!
- 中科院计算所发布的“木兰”语言被疑Python“套壳”,团队负责人已停职检查|科研圈日报
- PHP如何打造一个高可用高性能的网站呢?
- 用 PHP 处理 10 亿行数据!
- 观点 | PHP or Python如何选择?或许你应该考虑一下这三个问题
