GPIO 子系统架构解析:Linux 如何管理 IO 引脚
- 2026-07-02 16:36:59
第一章 GPIO 子系统概述
1.1 GPIO 在 Linux 中的角色定位
GPIO(General Purpose Input Output)是 SoC 中最基础的一类外设资源。无论是 LED 控制、按键输入、复位信号、SPI/I2C 片选、WiFi 电源使能,还是各种中断检测,本质上都依赖 GPIO 引脚完成与外部世界的交互。对于 Linux 内核而言,GPIO 不仅仅是一个“高低电平输出接口”,它实际上承担着板级资源抽象的重要职责。Linux 需要将来自不同厂商、不同寄存器布局、不同控制方式的 GPIO 控制器统一抽象为标准接口,从而保证驱动层无需感知底层硬件差异。
早期 Linux 中 GPIO 使用方式较为原始,大量驱动直接操作寄存器完成引脚控制。这种模式虽然效率高,但会导致驱动与平台强耦合。随着 ARM SoC 大规模普及,Linux 引入 gpiolib 子系统,通过统一的 GPIO Framework 管理所有 GPIO 控制器与 GPIO consumer。开发者只需要调用统一 API 即可完成 GPIO 申请、方向设置、电平读写与中断配置,而底层由 GPIO controller driver 完成真正的寄存器操作。这也是 Linux GPIO 子系统演进的重要转折点。
1.2 GPIO 子系统的整体架构
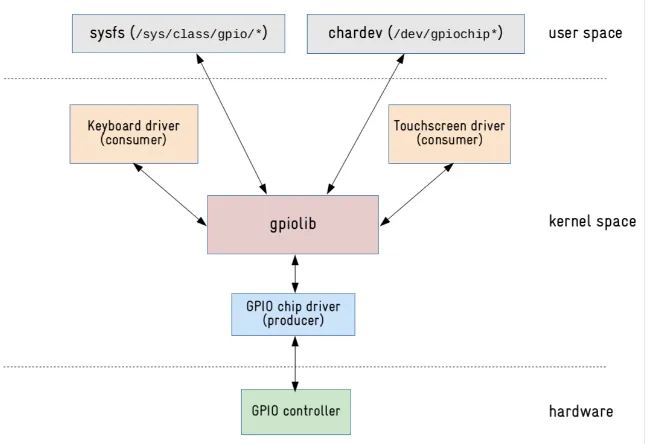
Linux GPIO 子系统本质上是一套“分层式架构”。最上层是 consumer driver,也就是各种设备驱动,例如 LCD、WiFi、触摸屏、CAN、Ethernet PHY 等;中间层是 gpiolib framework,负责 GPIO 编号管理、资源申请、引用计数、设备树解析以及字符设备导出;最底层则是 GPIO controller driver,用于适配具体硬件控制器。
整个调用路径通常如下:设备驱动通过 gpiod_get() 获取 GPIO 描述符,gpiolib 根据设备树信息找到对应 GPIO controller,然后调用 gpio_chip 中注册的 direction_output、set、get 等回调函数,最终完成寄存器访问。对于 ARM SoC 而言,一个 GPIO bank 往往对应一个 gpio_chip。以 RK3568 为例,GPIO0_A0、GPIO0_A1、GPIO1_B3 等都属于不同 GPIO bank,Linux 会为每个 bank 创建独立 gpio_chip 实例,并统一挂入 GPIO framework 中。
第二章 GPIO 编号与描述符机制
2.1 传统 GPIO 编号机制
早期 Linux GPIO 使用全局整数编号进行管理。例如 GPIO23、GPIO87、GPIO145 等。驱动开发中通常通过 gpio_request() 申请 GPIO,然后调用 gpio_direction_output() 设置方向,最后使用 gpio_set_value() 控制电平。这种方式简单直接,但存在明显缺陷。首先,不同平台 GPIO 编号并不统一;其次,GPIO 编号与硬件拓扑耦合严重,一旦设备树或控制器布局发生变化,驱动代码就需要同步修改。
例如在某些 SoC 中 GPIO0_A0 对应全局编号 0,而 GPIO1_B0 可能对应 40;但在另一平台中同样名字的 GPIO 可能对应完全不同的编号。这种设计会导致驱动缺乏可移植性。因此 Linux 后续逐渐弱化全局 GPIO number 的使用方式,并引入 descriptor-based GPIO framework。当前新驱动已经不推荐继续使用 gpio_request()/gpio_set_value() 这种 legacy API。
2.2 GPIO Descriptor 描述符机制
为了解决 GPIO 编号耦合问题,Linux 引入 GPIO descriptor 机制。descriptor 本质上是 struct gpio_desc 结构体,用于抽象一个 GPIO 资源。驱动不再直接操作 GPIO number,而是通过描述符访问 GPIO。典型 API 如 gpiod_get()、gpiod_direction_output()、gpiod_set_value() 等。
这种模式最大的优势在于设备无感知 GPIO 编号。驱动只需要通过名字获取 GPIO,例如:
reset_gpio = gpiod_get(dev, "reset", GPIOD_OUT_HIGH);这里的 "reset" 实际来自设备树中的 reset-gpios 属性。gpiolib 会自动解析设备树、找到 GPIO controller、完成 GPIO 映射并返回 descriptor。这样驱动无需关心 GPIO 位于哪个 bank、哪个偏移,也无需关心全局编号。Linux 内核当前大量新驱动都已经完全切换至 descriptor API,这是 GPIO 子系统现代化的重要标志。
第三章 GPIO Controller 驱动实现机制
3.1 gpio_chip 核心结构解析
Linux 中 GPIO controller 的核心抽象是 struct gpio_chip。每个 GPIO 控制器驱动都需要实现 gpio_chip,并向 gpiolib 注册。gpio_chip 本质上是一组 GPIO 操作回调,用于描述底层硬件能力,典型 gpio_chip 定义如下:
struct gpio_chip {const char *label;int base;u16 ngpio;int (*direction_input)(struct gpio_chip *gc,unsigned int offset);int (*direction_output)(struct gpio_chip *gc,unsigned int offset,int value);int (*get)(struct gpio_chip *gc,unsigned int offset);void (*set)(struct gpio_chip *gc,unsigned int offset,int value);};
其中 ngpio 表示当前 controller 管理多少 GPIO;offset 表示当前 bank 内部偏移;direction_input/direction_output 用于配置方向;get/set 用于读写电平。gpiolib 在上层 API 与底层寄存器之间,正是依靠 gpio_chip 进行桥接。3.2 GPIO 驱动注册流程
GPIO controller driver 初始化过程中,最核心步骤就是 gpiochip_add_data() 注册。Linux 在 probe 阶段完成寄存器映射、中断初始化后,会创建 gpio_chip 并挂入 gpiolib framework,典型流程如下:
staticintrk_gpio_probe(struct platform_device *pdev){struct rk_gpio *gpio;gpio = devm_kzalloc(&pdev->dev,sizeof(*gpio),GFP_KERNEL);gpio->base = devm_platform_ioremap_resource(pdev, 0);gpio->chip.label = dev_name(&pdev->dev);gpio->chip.parent = &pdev->dev;gpio->chip.ngpio = 32;gpio->chip.direction_input = rk_gpio_direction_input;gpio->chip.direction_output = rk_gpio_direction_output;gpio->chip.get = rk_gpio_get;gpio->chip.set = rk_gpio_set;return gpiochip_add_data(&gpio->chip, gpio);}
注册完成后,当前 GPIO controller 即被纳入 Linux GPIO framework 管理。此时 consumer driver 已经可以通过设备树引用对应 GPIO 资源。对于多 bank SoC,一般每个 bank 都会独立注册 gpio_chip,例如 GPIO0、GPIO1、GPIO2 分别对应不同 gpio_chip 实例。
第四章 GPIO 与 Device Tree 的关系
4.1 设备树中的 GPIO 描述方式
Linux 设备树大量依赖 GPIO 描述外设连接关系。GPIO controller 通常会在 DTS 中声明 gpio-controller 属性,并通过 #gpio-cells 指定 GPIO 编码格式。consumer device 则通过 xxx-gpios 属性引用 GPIO,例如:
gpio0: gpio@fdd60000 {compatible = "rockchip,gpio-bank";gpio-controller;#gpio-cells = <2>;};led {led-gpios = <&gpio0 5 GPIO_ACTIVE_HIGH>;};
这里&gpio0 表示GPIO controller;5表示offset;GPIO_ACTIVE_HIGH 表示有效电平极性。Linux 在解析设备树时,会通过 of_get_named_gpio_flags() 或 gpiod_get() 自动完成 GPIO 映射。对于驱动开发者而言,只需要关心逻辑语义,不再需要处理复杂的 bank 编号转换。
4.2 GPIO Flags 与极性控制
设备树 GPIO 配置中最容易被忽略的是 GPIO flags。很多驱动运行异常,本质上并不是 GPIO 配置错误,而是 active-high/active-low 极性理解错误。Linux GPIO framework 会自动根据 flags 对逻辑值进行翻转,例如:reset-gpios = <&gpio1 3 GPIO_ACTIVE_LOW>;
此时驱动调用:gpiod_set_value(reset_gpio, 1);
最终输出到物理引脚的实际上是低电平,因为 reset 信号定义为 active-low。Linux 会自动完成逻辑翻转。这种设计使驱动逻辑更加统一。驱动层只关心“assert/deassert”语义,而无需关心真实电平状态。这也是 descriptor framework 的重要优势之一。
第五章 GPIO 中断与 IRQ 子系统
5.1 GPIO IRQ 的实现原理
GPIO 除了普通输入输出功能外,更重要的用途之一是中断检测。例如按键中断、PHY link 中断、触摸屏中断、霍尔传感器中断等,大量场景都依赖 GPIO IRQ。Linux 中 GPIO IRQ 与 IRQ subsystem 深度融合。
很多 GPIO controller 同时也是 interrupt controller。GPIO controller 驱动除了注册 gpio_chip,还会注册 irq_chip。这样 Linux 就能将 GPIO pin 映射为 IRQ number。驱动层只需要 request_irq() 即可完成 GPIO 中断注册,GPIO IRQ 初始化核心流程如下:
irq = gpiod_to_irq(desc);request_irq(irq,gpio_irq_handler,IRQF_TRIGGER_FALLING,"gpio-key",data);
其中 gpiod_to_irq() 用于将 GPIO descriptor 转换为 Linux IRQ number。后续中断路径则完全进入 generic IRQ framework。GPIO controller 负责底层中断状态读取与清除。
5.2 GPIO 中断链路分析
Linux GPIO IRQ 实际上包含两级中断。第一层是 GPIO controller 对应的 parent IRQ,例如 GIC SPI 中断;第二层则是 GPIO pin 内部子中断。GPIO controller 驱动在顶层 IRQ handler 中读取 GPIO interrupt status register,然后通过 generic_handle_irq() 分发到具体 GPIO pin IRQ,典型流程:
GPIO Pin↓GPIO Controller↓GIC Interrupt↓Parent IRQ Handler↓Read GPIO_INT_STATUS↓Dispatch Sub IRQ↓Consumer ISR
这种设计本质上属于 irq domain 分层架构。Linux IRQ subsystem 允许 GPIO controller 动态创建 IRQ domain,并将 GPIO offset 映射为 virtual IRQ。这样上层驱动无需感知底层中断拓扑。对于 ARM64 SoC,大部分 GPIO IRQ 都采用 hierarchical irqdomain 架构实现。
第六章 GPIO 子系统高级机制与调试方法
6.1 PinCtrl 与 GPIO 的关系
很多开发者容易将 GPIO 与 pinctrl 混为一谈,但两者职责完全不同。GPIO 负责“引脚电平控制”,而 pinctrl 负责“引脚复用配置”。一个物理引脚往往支持多种功能,例如 UART TX、SPI MOSI、GPIO output 等。真正决定当前引脚工作模式的是 pinctrl,Linux pinctrl 子系统会在设备 probe 前完成 pinmux 配置。
uart2 {pinctrl-names = "default";pinctrl-0 = <&uart2m0_xfer>;};
此时 pinctrl 会将对应引脚切换为 UART 功能,而不是 GPIO 模式。如果开发者尝试控制该 GPIO,往往会发现电平无法变化。因此 GPIO 调试过程中必须首先确认 pinmux 是否正确。大量“GPIO 无法输出”的问题,本质上都是 pinctrl 配置错误。
6.2 GPIO 调试方法与用户空间接口
Linux 提供了多种 GPIO 调试手段。早期系统通常使用 sysfs GPIO 接口:
echo 23 > /sys/class/gpio/exportecho out > /sys/class/gpio/gpio23/directionecho 1 > /sys/class/gpio/gpio23/value
但 sysfs GPIO 已经逐步废弃。当前推荐使用 character device GPIO interface,也就是 /dev/gpiochipX。用户空间通过 libgpiod 操作 GPIO。
gpioset gpiochip0 5=1gpioget gpiochip0 5
相比 sysfs,字符设备接口支持 descriptor、事件监听、bulk operation 与 line ownership 管理,更符合现代 Linux GPIO 架构。对于调试而言,/sys/kernel/debug/gpio 也是极其重要的接口。开发者可以查看 GPIO 当前 owner、方向、电平与 consumer 信息。
cat /sys/kernel/debug/gpio输出内容能够快速定位 GPIO 是否已经被其他驱动占用。很多 GPIO 冲突问题、本质上都可以通过 debugfs 快速发现。
第七章 GPIO 子系统内部实现细节
7.1 gpiolib 内部数据结构
Linux GPIO framework 的核心代码位于 drivers/gpio/gpiolib.c。整个 framework 内部最核心的数据结构包括 gpio_device、gpio_chip 与 gpio_desc。gpio_chip 用于描述 controller;gpio_desc 用于描述单个 GPIO;gpio_device 则用于将 controller 与字符设备绑定。
Linux 在 gpiochip_add_data() 注册过程中,会自动创建 gpio_desc 数组。每个 GPIO line 都对应一个 gpio_desc。descriptor 中不仅保存 GPIO 状态,还保存 consumer label、flags、direction、active-low 等信息。由于 descriptor 是 GPIO framework 的统一抽象,因此无论 GPIO 来自 ARM SoC、I2C GPIO expander 还是 FPGA controller,最终都被抽象为统一 gpio_desc,Linux 内部大量 API 最终都围绕 gpio_desc 展开。例如:
struct gpio_desc {struct gpio_device *gdev;unsigned long flags;const char *label;};
其中 gdev 指向 gpio_device;flags 保存 GPIO 状态;label 用于记录当前 consumer。Linux 正是通过 descriptor 实现 GPIO 生命周期管理与资源跟踪。
7.2 GPIO 睡眠与原子上下文问题
GPIO 操作并不一定总是“快速寄存器访问”。部分 GPIO controller 位于 I2C 或 SPI 总线上,例如 PCA953x GPIO expander。这类 GPIO 操作可能导致 sleep。因此 Linux 将 GPIO API 区分为 can sleep 与 atomic 两类。
gpiod_set_value();gpiod_set_value_cansleep();
前者要求当前 GPIO controller 支持原子访问;后者允许 sleep。驱动开发中如果在中断上下文调用可能 sleep 的 GPIO API,就可能触发:
BUG: sleeping function called from invalid context因此 Linux GPIO framework 内部会通过 chip->can_sleep 标志区分 controller 类型。对于 SoC 内部 GPIO,一般支持 atomic access;对于 I2C GPIO expander,则必须使用 cansleep API。这是 GPIO 驱动开发中非常容易踩坑的点。
第八章 GPIO Expander 与多级 GPIO 架构
8.1 GPIO Expander 的工作机制
很多嵌入式系统 GPIO 数量不足,因此会通过 I2C/SPI GPIO expander 扩展 IO。例如 PCA9555、MCP23017、TCA6416 等。这类芯片本质上属于“外部 GPIO controller”。Linux 同样通过 gpio_chip 将其纳入统一 GPIO framework。
GPIO expander 驱动本质上与普通 GPIO controller 没有区别,只是底层 set/get 操作不再直接访问 MMIO 寄存器,而是通过 I2C/SPI 总线访问外部寄存器。
staticvoidpca953x_set_value(struct gpio_chip *gc,unsigned offset,int value){struct pca953x_chip *chip = gpiochip_get_data(gc);i2c_smbus_write_byte_data(chip->client,REG_OUTPUT,value);}
从 Linux framework 角度来看,内部 GPIO 与外部 expander 并没有本质差异。consumer driver 无需感知 GPIO 来源,这也是 gpiolib 抽象层的重要价值。
8.2 Cascaded GPIO IRQ 架构
GPIO expander 不仅可以扩展 GPIO,还可能扩展 IRQ。典型 GPIO expander 通常只有一个 parent interrupt pin,当任意 GPIO line 触发中断时,expander 会拉低 INT 引脚。Linux 需要在 parent IRQ 中进一步读取 expander interrupt status register,再将子中断分发出去。
这种架构本质上属于 cascaded interrupt controller。Linux IRQ subsystem 允许 GPIO expander 动态创建 irqdomain,从而让每个 GPIO line 都拥有独立 Linux IRQ number。最终驱动层看到的仍然是标准 request_irq() 接口,而不会感知底层多级中断链路。
这种分层设计也是 Linux IRQ subsystem 极其强大的原因之一。无论是 SoC GPIO、PMIC GPIO、I2C GPIO expander 还是 FPGA GPIO,都能统一接入 IRQ framework。这种架构能力也是 Linux 能够支撑复杂嵌入式平台的重要基础。
第九章 GPIO 用户空间接口演进
9.1 sysfs GPIO 的问题
Linux 早期 GPIO 用户空间接口主要依赖 sysfs。开发者通过 export/unexport 即可动态导出 GPIO,然后通过 direction/value 文件控制电平。这种方式简单直观,因此大量老项目至今仍在使用。
但 sysfs GPIO 存在大量架构问题。首先它依赖全局 GPIO 编号,而 descriptor framework 已经逐渐弱化编号概念;其次 sysfs 缺乏 line ownership 管理,多个进程可能同时操作同一个 GPIO;另外它无法很好支持 bulk operation、event queue 与 descriptor semantics。因此 Linux 官方已经明确将 sysfs GPIO 标记为 deprecated。
Documentation/ABI/obsolete/sysfs-gpio当前新平台与新项目已经不推荐继续使用 sysfs GPIO 接口。
9.2 Character Device GPIO 接口
为了解决 sysfs 的结构性缺陷,Linux 引入 GPIO character device interface。每个 GPIO controller 对应一个 /dev/gpiochipX 字符设备。用户空间通过 ioctl 与 descriptor 机制完成 GPIO 控制,libgpiod 就是官方推荐的用户空间工具链。
gpioinfogpiodetectgpiomongpiosetgpioget
其中 gpioinfo 可以查看 GPIO line consumer;gpiomon 可以监听 GPIO edge event;gpioset 可以原子批量设置 GPIO。相比 sysfs,这套架构更加接近内核 descriptor framework。本质上它是 gpiolib 在用户空间的延伸。
gpiomon gpiochip0 5可以直接监听 GPIO edge interrupt。这种能力在工业控制、边沿检测与事件采集中非常重要。
第十章 GPIO 性能与并发问题
10.1 GPIO 操作延迟分析
很多开发者认为 GPIO set/get 只是简单寄存器读写,因此性能不会成为问题。但实际上 Linux GPIO 调用链并不短。从 consumer driver 到 gpiolib,再到 gpio_chip callback,中间涉及锁、descriptor、tracepoint 与 IRQ protection,因此 GPIO 操作延迟并不低。
对于 MMIO GPIO,单次 gpiod_set_value() 通常在微秒级;而对于 I2C GPIO expander,延迟甚至可能达到毫秒级。这意味着 GPIO 并不适合高频实时波形输出。例如 bitbang SPI、软件 PWM 或高速协议模拟,如果频率较高,往往无法满足实时性需求。
Linux GPIO framework 更适合作为控制型 IO,而不是高速数据 IO。因此真正高速场景通常会使用专用控制器,例如 SPI、PWM、UART、I2S 等硬件模块,而不是 GPIO bitbang。
10.2 GPIO 并发与锁机制
Linux GPIO framework 内部大量使用 spinlock 与 mutex 保证并发安全。尤其在 SMP 多核系统中,多个 CPU 可能同时访问同一个 GPIO controller。如果缺乏同步机制,就可能出现寄存器覆盖问题,例如 direction register 与 data register 往往采用 read-modify-write 模式:
val = readl(reg);val |= BIT(offset);writel(val, reg);
如果两个 CPU 同时修改不同 GPIO bit,就可能发生竞争。因此 GPIO controller driver 通常需要在 set/get/direction callback 内部加锁。对于实时性要求较高的平台,部分驱动会使用 raw_spinlock_t 降低锁开销。
此外 GPIO IRQ 与普通 GPIO access 之间也可能发生竞争。例如中断处理中修改 GPIO 状态,而普通线程同时访问相同寄存器。因此 GPIO controller driver 的锁设计实际上非常关键,工业级平台往往会对 GPIO 并发路径进行专门优化。
第十一章 GPIO 在实际驱动中的应用
11.1 Reset GPIO 与 Power GPIO
GPIO 在驱动中的最常见用途之一是 reset 与 power 控制。例如 WiFi、蓝牙、LCD、Ethernet PHY、摄像头等外设,在初始化阶段通常都需要 reset pulse 与 power enable sequence,Linux 驱动一般通过 descriptor framework 获取这些 GPIO:
reset_gpio = devm_gpiod_get(dev,"reset",GPIOD_OUT_LOW);power_gpio = devm_gpiod_get(dev,"power",GPIOD_OUT_HIGH);
随后通过时序控制完成硬件初始化:
gpiod_set_value(reset_gpio, 0);msleep(20);gpiod_set_value(reset_gpio, 1);
很多硬件初始化失败问题,本质上并不是驱动逻辑错误,而是 GPIO 时序错误。例如 reset pulse 太短、电源 enable 顺序错误、GPIO active-low 配置错误等。这类问题在板级调试阶段极其常见。
11.2 GPIO Keys 驱动机制
Linux GPIO keys 是 GPIO 子系统最经典的 consumer 之一。按键驱动通常不需要开发者自行编写代码,只需在设备树中声明 gpio-keys 节点即可,例如:
gpio-keys {compatible = "gpio-keys";key-power {gpios = <&gpio0 5 GPIO_ACTIVE_LOW>;linux,code = <KEY_POWER>;};};
Linux gpio-keys 驱动会自动申请 GPIO IRQ,并将 GPIO edge event 转换为 input subsystem event。最终用户空间即可通过 /dev/input/eventX 接收按键事件。
这种设计体现了 Linux 子系统之间的协作关系。GPIO framework 负责 IO 控制;IRQ subsystem 负责中断分发;input subsystem 负责输入事件上报。多个 subsystem 共同构建了完整驱动链路。
第十二章 GPIO 子系统未来演进方向
12.1 Descriptor 化与 API 统一
Linux GPIO 子系统未来最重要的发展方向之一,就是彻底 descriptor 化。当前虽然 legacy GPIO number API 仍然存在,但新驱动已经全面转向 gpiod_* API。未来内核中 legacy API 很可能进一步边缘化。
descriptor framework 最大优势在于解耦。驱动无需关心 GPIO number、controller topology 与 pin offset,而只需要关注逻辑功能。这种模式与 Linux device model 的整体设计理念高度一致。
gpiod_get(dev, "reset", GPIOD_OUT_HIGH);这种接口语义远比 gpio_request(23) 更清晰。它强调的是“资源用途”,而不是“物理编号”。这也是现代 Linux 驱动架构的重要演进方向。
12.2 GPIO 与硬件抽象层融合趋势
随着 Linux 平台复杂度提升,GPIO 已经不再是简单 IO 控制模块,而是逐渐演变为板级资源抽象层的一部分。GPIO 与 pinctrl、regulator、clock、reset controller、power domain 等子系统之间的协作越来越紧密,例如一个摄像头初始化过程,可能涉及:
regulator_enable()clk_prepare_enable()pinctrl_select_state()gpiod_set_value(reset_gpio, 1)
这里 GPIO 已经成为整个 power sequence 的组成部分,而不再只是单独的 IO 操作接口。未来 Linux GPIO framework 很可能进一步强化 descriptor 与 firmware abstraction 的融合能力,从而支撑更复杂的 SoC 与工业平台架构。
从整个 Linux 内核演进方向来看,GPIO 子系统实际上体现了 Linux 对“硬件抽象统一化”的长期追求。它通过 framework、descriptor、device tree 与 irqdomain 等机制,将原本高度碎片化的硬件控制逻辑统一为标准模型。这也是 Linux 能够支撑海量 SoC 平台与复杂嵌入式设备的重要原因。


