Python实战|三大经典边缘检测算子(Sobel/Prewitt/Roberts)一键实现
哈喽,各位CV爱好者、Python学习者!
在计算机视觉、图像处理领域,边缘检测是最基础、最核心的入门操作。
无论是图像分割、目标识别、轮廓提取,还是AI视觉预处理,第一步几乎都是提取图像边缘特征。
很多新手入门都会困惑:Sobel、Prewitt、Roberts三种边缘算子到底有什么区别?代码怎么写?效果怎么对比?
今天这篇干货推文,带你用 OpenCV + Scikit-Image + Matplotlib,一次性实现三种经典边缘检测算法,代码可直接复制运行,零基础也能看懂!
unsetunset一、什么是图像边缘检测?unsetunset
图像的边缘,简单来说就是像素灰度值发生突变的区域,也是图像中物体轮廓、纹理的核心特征。
边缘检测的核心目的:
而 Roberts、Prewitt、Sobel 是传统图像处理中,最经典、最常用的三大一阶微分边缘检测算子。
unsetunset二、三大算子核心特点(新手必看)unsetunset
1. Roberts 算子
最简单的局部边缘检测算子,仅利用对角像素差值计算边缘,速度最快,但对噪声敏感,仅适合低噪声、高对比度图像。
2. Prewitt 算子
通过邻域像素平均差分检测边缘,计算逻辑简单,能平滑轻微噪声,水平、垂直边缘检测效果均衡,精度中等。
3. Sobel 算子(最常用)
在Prewitt基础上优化,增加了像素权重,抗噪声能力最强,边缘检测更精细,是工业项目、学术实验中使用最多的边缘检测算子。
unsetunset三、完整可运行实战代码unsetunset
# 导入所需库from skimage import data, filters # skimage提供算子和示例图import cv2import matplotlib.pyplot as plt# 1. 读取图片并转为灰度图(两种模式任选)# 方式1:使用skimage内置相机图片(无路径报错,推荐新手测试)img_gray = data.camera()# 方式2:读取本地自定义图片(取消注释,修改路径即可使用)# img = cv2.imread('../data/cqc.png')# img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 2. 三大算子边缘检测edges_sobel = filters.sobel(img_gray) # Sobel算子检测edges_prewitt = filters.prewitt(img_gray) # Prewitt算子检测edges_roberts = filters.roberts(img_gray) # Roberts算子检测# 3. 设置画布,2行2列布局,统一展示对比结果plt.figure(figsize=(12, 8)) # 定义画布尺寸# 子图1:原始灰度图像plt.subplot(2, 2, 1)plt.imshow(img_gray, cmap='gray')plt.title('Original Gray Image', fontsize=12)plt.axis('off') # 隐藏坐标轴,画面更整洁# 子图2:Sobel边缘检测结果plt.subplot(2, 2, 2)plt.imshow(edges_sobel, cmap='gray')plt.title('Sobel Edge Detection', fontsize=12)plt.axis('off')# 子图3:Prewitt边缘检测结果plt.subplot(2, 2, 3)plt.imshow(edges_prewitt, cmap='gray')plt.title('Prewitt Edge Detection', fontsize=12)plt.axis('off')# 子图4:Roberts边缘检测结果plt.subplot(2, 2, 4)plt.imshow(edges_roberts, cmap='gray')plt.title('Roberts Edge Detection', fontsize=12)plt.axis('off')# 4. 自动调整子图间距,展示全部图像plt.tight_layout()plt.show()
unsetunset
四、代码逐段详细解析unsetunset
1. 库函数导入
skimage.filters:封装好三大边缘检测算子,无需手动推导公式,开箱即用;
cv2:用于读取本地图片、图像色彩转换;
matplotlib.pyplot:实现图像绘图、布局展示。
2. 图像读取与预处理
边缘检测算法仅支持灰度图像,因此必须将彩色图像转为灰度图。
代码提供两种模式,新手优先使用内置 data.camera(),彻底规避路径报错问题。
3. 核心算子检测
三行核心代码,分别调用封装好的算子,一键提取图像边缘特征,简洁高效。
4. 多图布局展示
采用 2×2子图布局,同时展示原图+三种检测结果,方便直观对比差异;
cmap=gray 强制灰度显示,避免Matplotlib默认彩色失真;
axis(off) 隐藏坐标轴,优化可视化效果。
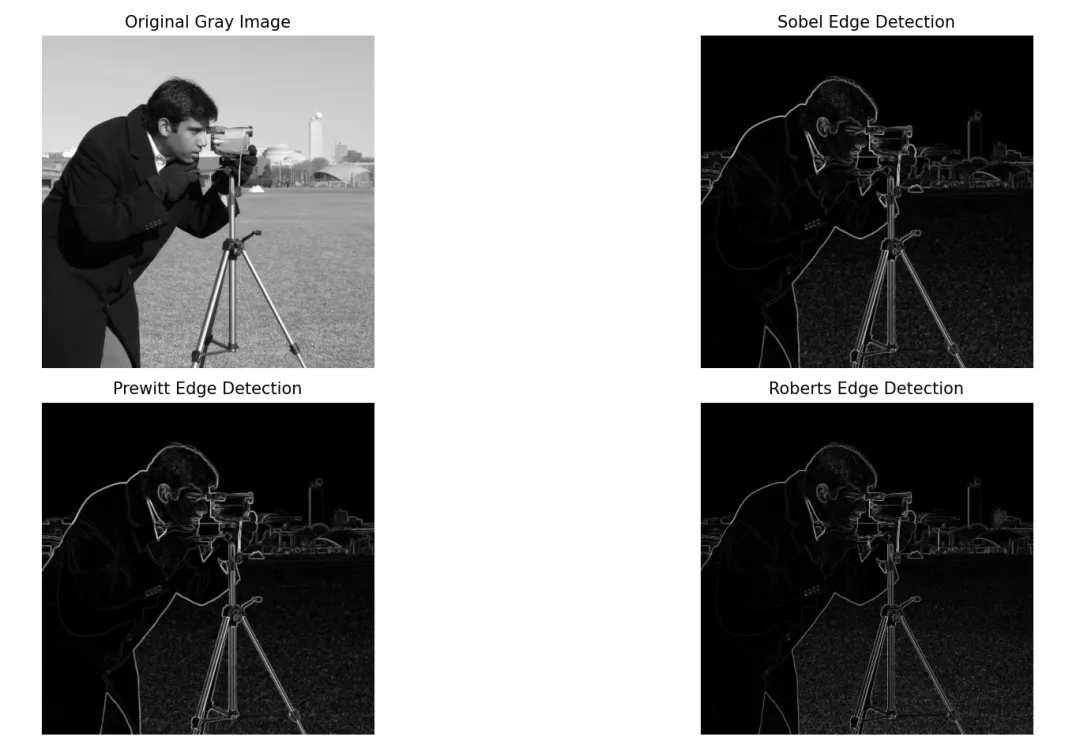
unsetunset五、三种算子效果&适用场景总结unsetunset
运行代码后可清晰看出三者差异,这里给大家总结好选型标准:
✅ Sobel算子(首选)
边缘连续、细节丰富、抗干扰强,适合绝大多数场景,是项目开发、论文实验的首选。
✅ Prewitt算子
效果中规中矩,计算成本低,适合对精度要求不高、追求运行速度的场景。
✅Roberts算子
边缘线条较粗、易受噪声干扰,仅适合画质清晰、无噪点的简单图像,日常使用最少。
unsetunset六、新手常见踩坑问题解答unsetunset
Q1:为什么原代码只能看到最后一张效果图?
连续调用 plt.imshow() 会图像覆盖,必须用 subplot 子图布局分开展示。
Q2:运行报错:图片路径不存在?
优先使用代码内置测试图,熟悉后再修改本地图片路径,绝对避免路径报错。
Q3:图像显示彩色失真?
必须添加 cmap=gray; 参数,强制灰度渲染。
unsetunset七、最后总结unsetunset
这三种经典边缘检测算子是计算机视觉的入门基石,后续的Canny边缘检测、目标轮廓提取、图像特征匹配,都是基于这类基础算子迭代优化而来。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
