大家好,我是蟹老板~
前几天后台有个的兄弟留言说:“哥,Linux驱动到底是在写啥?不就是read、write、ioctl那一套吗?”
兄弟,你那是应用层接口,那是皮,Linux设备驱动模型的精髓,在于皮囊底下的骨架和经络,你如果只盯着file_operations看,那你永远只能写写简单的字符设备,一旦碰到复杂的总线、热插拔、电源管理,立马凉凉。
Linux驱动模型其实就干了一件事:让设备和驱动能够自动找到彼此。
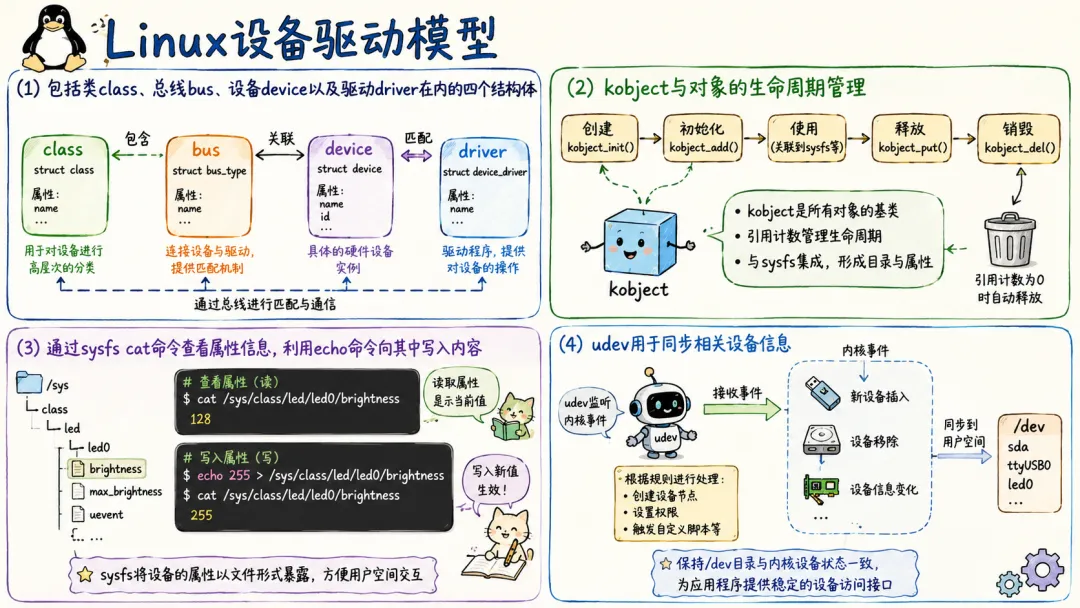
一、 驱动模型底层基石:内核核心对象体系
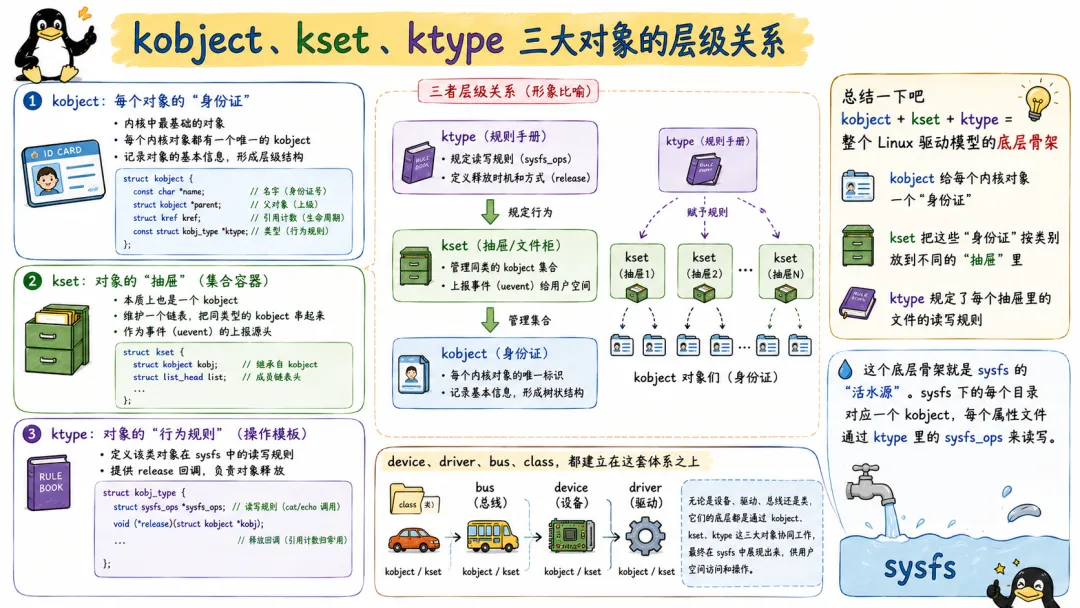
Linux内核是用C语言写的,但面向对象的思想却无处不在。为了把系统里的各种总线、设备、驱动给统一管起来,内核整出了三个最底层的核心对象:kobject、kset 和 ktype。
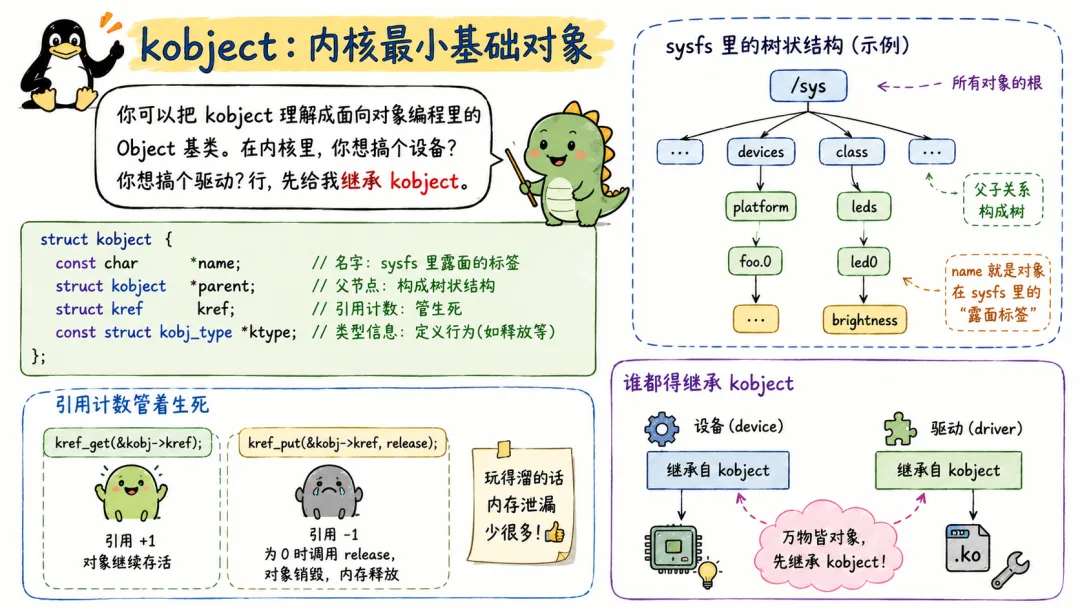
1.1 kobject:内核最小基础对象
内核代码里有个说法:一切皆 kobject,任何一个内核对象要能被统一管理,都需要一个身份证——这个身份证就是struct kobject。
struct kobject { const char *name; // 名字,对应sysfs下的一个目录struct list_head entry; // 链表节点,用于组成双向链表struct kobject *parent; // 父对象指针,体现出层级关系struct kset *kset; // 当前kobject所属的集合struct kobj_type *ktype; // 当前kobject的类型信息struct kernfs_node *sd; // sysfs文件系统的目录项struct kref kref; // 引用计数 unsigned int state_initialized:1; unsigned int state_in_sysfs:1; unsigned int state_add_uevent_sent:1; unsigned int state_remove_uevent_sent:1; unsigned int uevent_suppress:1;};
别看这一堆字段,重点就三个:name(名字)、parent(父子关系)、kref(引用计数)、ktype(类型)。
kref就是内核里的"智能指针"原型,说白了就是一个计数器——有人用,计数就加1;用完就减1,减到0的时候调用release方法释放对象。内核用这个机制管理生命周期,防止用着用着对象被人删了。
parent指针构建起了 kobject 之间的父子层级关系,这种层级关系在内核中形成了一种树状结构。USB控制器下面挂USB设备,USB设备下面又挂USB接口的功能单元,sysfs里就是一层一层目录套目录。
但是这里有个坑:kobject本身并不单独使用。
Greg Kroah-Hartman在他那篇经典文章里说过这么一句话:**内核代码很少创建独立的kobject。相反,kobject被嵌入到其他结构体中,用于控制对更大的、特定领域对象的访问。**用面向对象的说法就是——kobject是所有设备对象的"基类",你写一个具体的设备驱动,定义的结构体里第一件事就是塞一个kobject进去,比如UIO驱动的struct uio_map:
struct uio_map {struct kobject kobj;struct uio_mem *mem;};
那给定一个指向kobject的指针,怎么拿到外层的uio_map?总不能让每个人都去算偏移量吧。
内核提供了container_of宏来解决这个问题:
struct uio_map *u_map = container_of(kp, struct uio_map, kobj);
这个宏在驱动开发的代码里到处可见,是C语言实现"继承"和"多态"的核心。
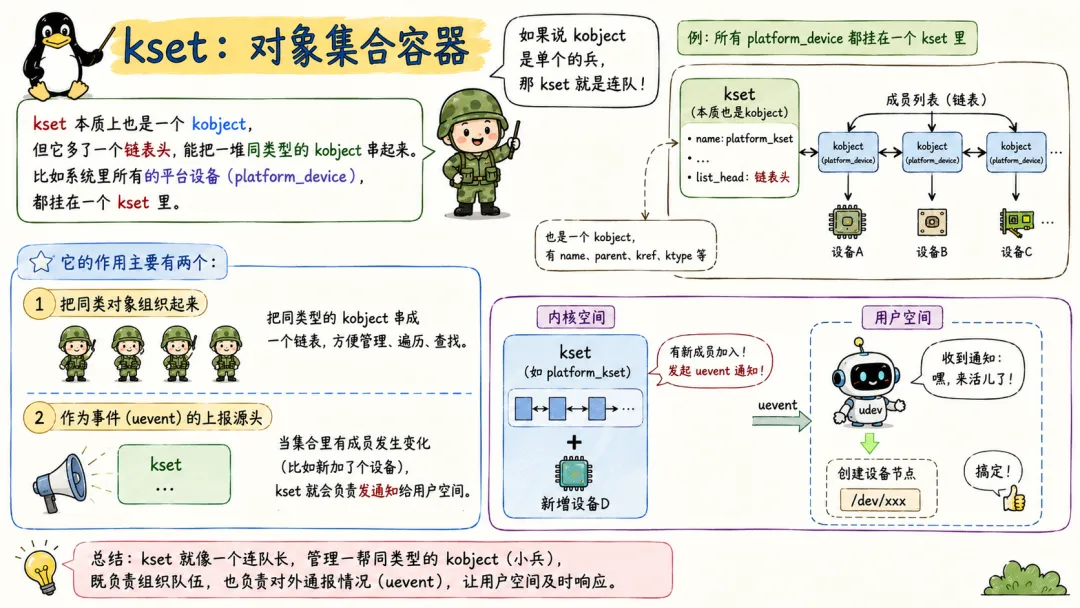
1.2 kset:对象集合容器
既然有了 kobject 这种单个的对象,那如果有一堆同类型的对象凑在一起,总得有个容器来装吧?那谁管一堆对象的集合?
这时候 kset 就粉墨登场了。
struct kset {struct list_head list; // 包含在kset内的所有kobject构成的双向链表 spinlock_t list_lock; // 链表锁struct kobject kobj; // kset自己的kobject,所以kset本身也是一个kobject conststruct kset_uevent_ops *uevent_ops; // 热插拔事件操作};
kset是个容器,里面有个双向链表list,把所有属于它的kobject串起来。同时kset自己还嵌了一个kobject,所以kset本身在sysfs里也表现为一个目录。
比如说,你在/sys/bus/下看到的所有目录——i2c、spi、pci、platform——每个目录对应一个kset。每个总线是一个kset,总线下面挂的设备和驱动各自又是kobject,全都挂在总线kset的链表里。
sysfs的目录结构很大程度上就是根据kset来组织的。
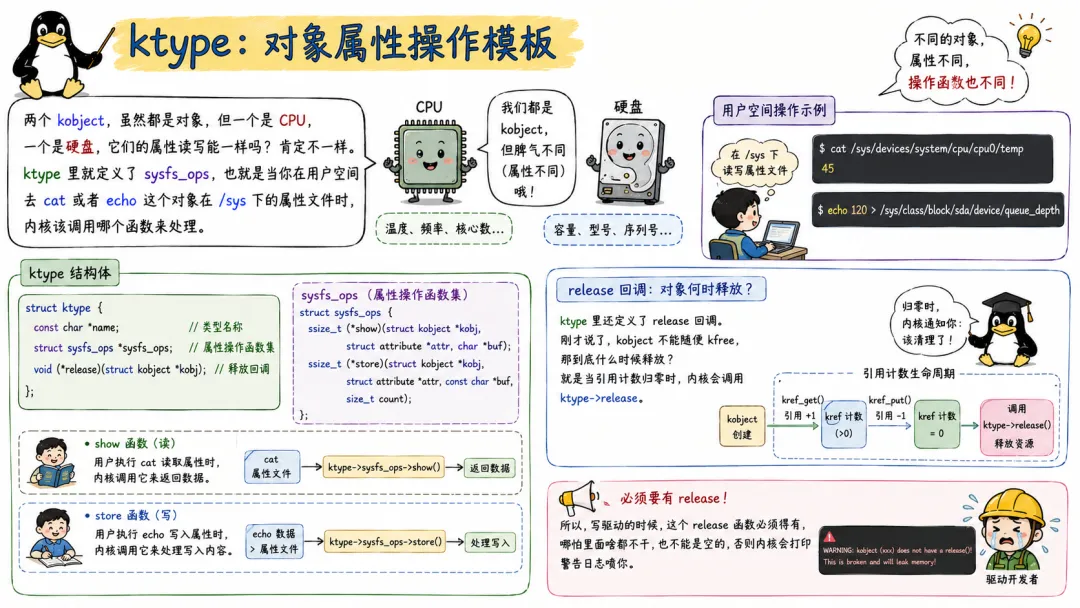
1.3 ktype:对象属性操作模板
刚学驱动那会儿,我经常把 kset 和 ktype 搞混,心想这俩货不都是分类的意思吗?
其实差别大了去了,kset 关注的是组织结构,管的是“把哪些对象放在一起”;而 ktype 关注的是行为和属性,管的是“这群对象应该怎么放屁、怎么拉屎”。
ktype长这样:
struct kobj_type { void (*release)(struct kobject *kobj); // 释放函数 conststruct sysfs_ops *sysfs_ops; // sysfs操作函数struct attribute **default_attrs; // 默认属性列表};
每个嵌入了kobject的结构体都需要一个对应的ktype。ktype控制着kobject在创建和销毁时应该做什么——怎么释放、sysfs里的属性文件该怎么读写。
说白了,kobject定义了"有什么",ktype定义了"怎么操作"。
1.4 三大对象的层级关系
总结一下吧:kobject+kset+ktype=整个Linux驱动模型的底层骨架。
- • kset把这些"身份证"按类别放到不同的"抽屉"里
这个底层骨架就是sysfs的"活水源"。sysfs下的每个目录对应一个kobject,每个属性文件通过ktype里的sysfs_ops来读写。
device、driver、bus、class,都建立在这套体系之上。
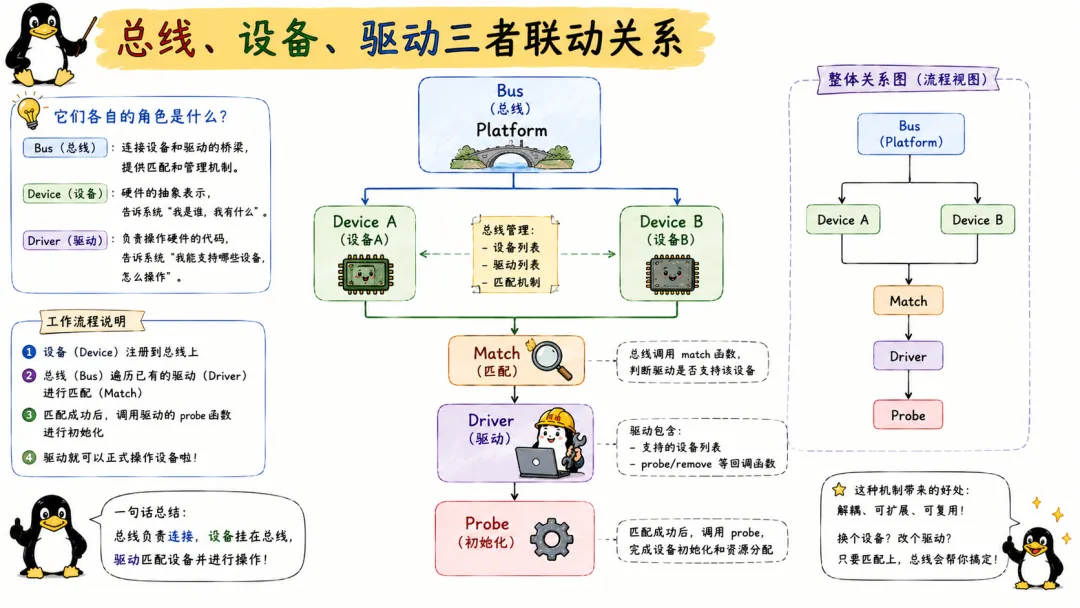
二、驱动模型三大核心支柱:总线、设备、驱动
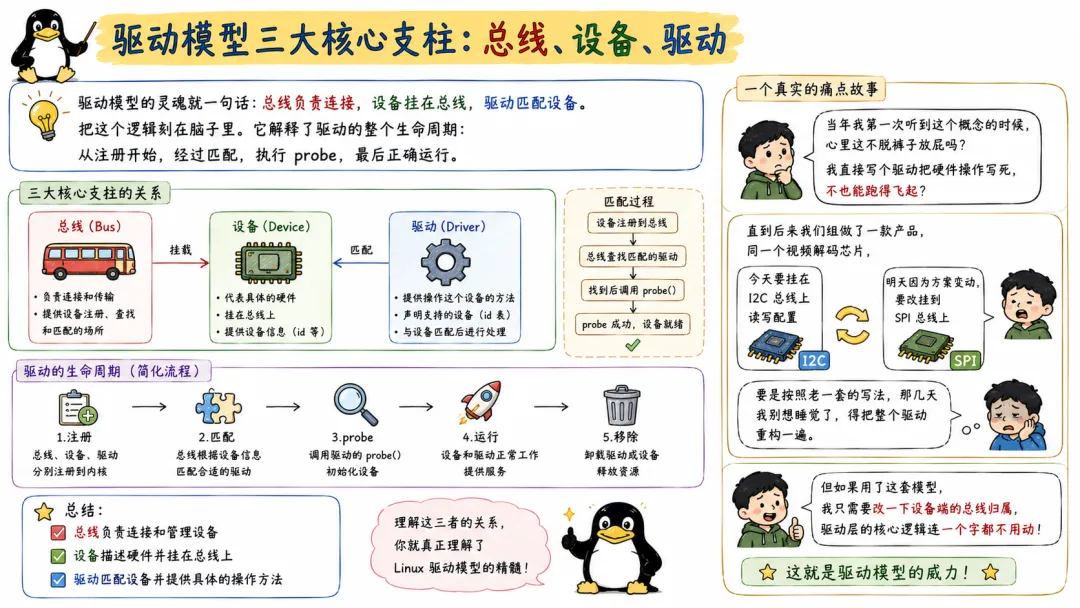
驱动模型的灵魂就一句话:总线负责连接,设备挂在总线,驱动匹配设备。
把这个逻辑刻在脑子里。它解释了驱动的整个生命周期:从注册开始,经过匹配,执行probe,最后正确运行。
当年我第一次听到这个概念的时候,心里这不脱裤子放屁吗?我直接写个驱动把硬件操作写死,不也能跑得飞起?
直到后来我们组做了一款产品,同一个视频解码芯片,今天要挂在 I2C 总线上读写配置,明天因为方案变动,要改挂到 SPI 总线上。要是按照老一套的写法,那几天我别想睡觉了,得把整个驱动重构一遍。但如果用了这套模型,我只需要改一下设备端的总线归属,驱动层的核心逻辑连一个字都不用动!
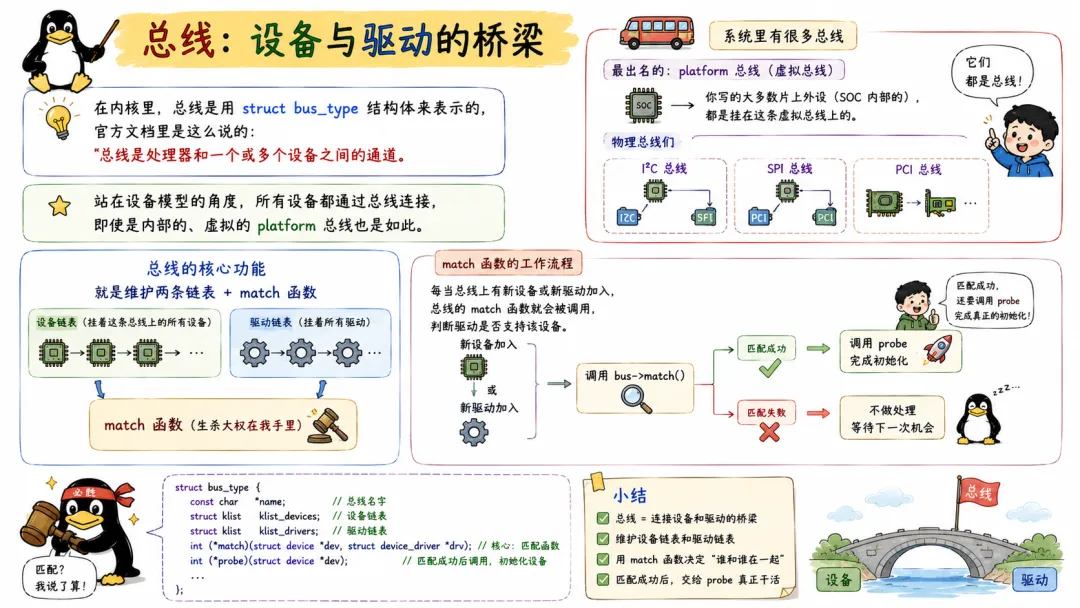
2.1 总线:设备与驱动的桥梁
在内核里,总线是用 struct bus_type 结构体来表示的,官方文档里是这么说的:总线是处理器和一个或多个设备之间的通道。
站在设备模型的角度,所有设备都通过总线连接,即使是内部的、虚拟的platform总线也是如此。
bus_type结构体里有些关键字段,我们来看一眼:
struct bus_type { const char *name; // 总线名称,如"platform"、"i2c" const char *dev_name;struct device *dev_root; conststruct attribute_group **bus_groups; conststruct attribute_group **dev_groups; conststruct attribute_group **drv_groups; int (*match)(struct device *dev, struct device_driver *drv); int (*uevent)(struct device *dev, struct kobj_uevent_env *env); int (*probe)(struct device *dev); int (*remove)(struct device *dev); // ... 还有PM电源管理相关函数};
};struct subsys_private *p; // 驱动核心私有数据struct lock_class_key lock_key;
重点说说这个match函数指针——每当总线上有新设备或新驱动加入,总线的match函数就会被调用,判断驱动和是否支持该设备。匹配成功,则事情还没完,后续还会调用probe完成真正的初始化。
内核里预定义了很多总线类型:platform_bus_type、i2c_bus_type、spi_bus_type、pci_bus_type……
我刚开始做嵌入式驱动的时候,一直不理解为什么GPIO控制器、UART控制器都要注册成platform设备,明明这些硬件不是真的通过物理总线连接的。后来才明白——platform总线是Linux内核定义的一条虚拟总线,专门用来管理那些没办法归类到I2C、SPI、USB等实体总线的设备。
ARM SoC里的片内外设几乎全挂在这条虚拟总线上。
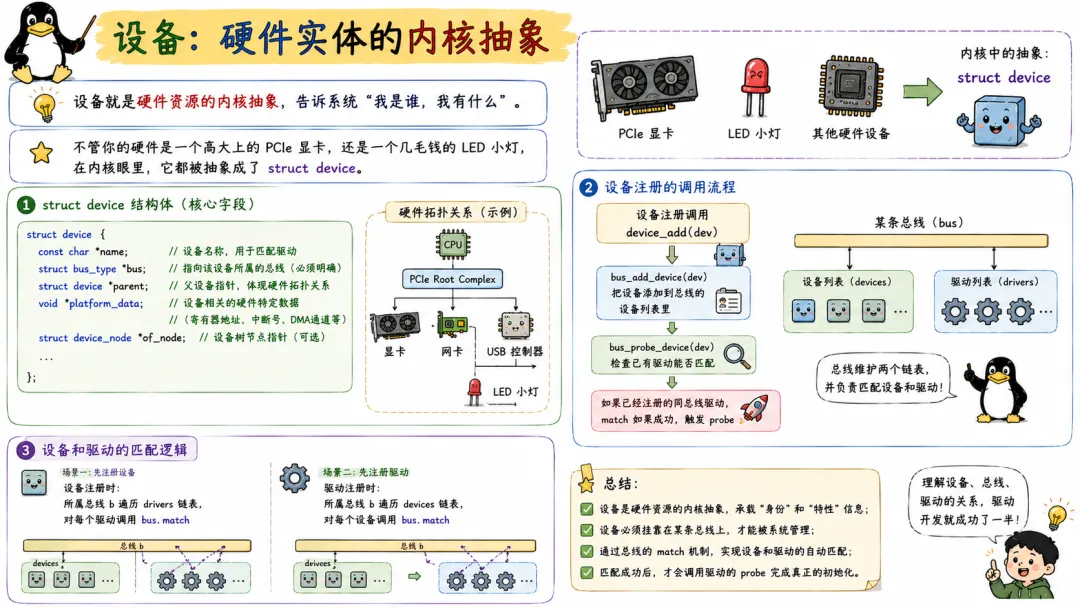
2.2 设备:硬件实体的内核抽象
接下来看设备,设备就是硬件资源的内核抽象,告诉系统"我是谁,我有什么"。
不管你的硬件是一个高大上的PCIe显卡,还是一个几毛钱的LED小灯,在内核眼里,它都被抽象成了 struct device。
struct device这个结构体定义特别大,我挑几个核心的说:
- • platform_data:设备相关的硬件特定数据(寄存器地址、中断号、DMA通道等)
- • of_node:如果使用了设备树,这个字段指向对应的设备树节点
注册设备的调用流程是这样的:
设备注册调用device_add() -> bus_add_device() // 把设备添加到总线的设备列表里 -> bus_probe_device() // 检查已有驱动能否匹配 -> 如果已经注册的同总线驱动,match如果成功,触发probe
设备和驱动的匹配逻辑:
设备注册时,它的所属总线b会遍历drivers链表,对每个驱动调用bus.match;如果先前注册了驱动,逻辑同样,设备注册时也会尝试已经注册的驱动。
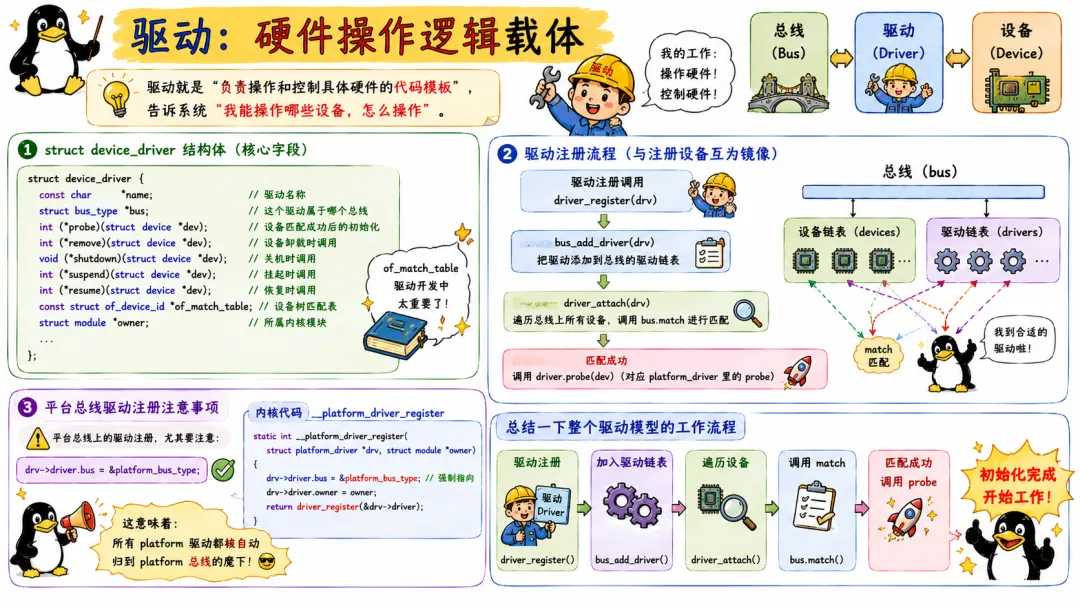
2.3 驱动:硬件操作逻辑载体
驱动是啥?驱动就是**"负责操作和控制具体硬件的代码模板"**,告诉系统"我能操作哪些设备,怎么操作"。
struct device_driver 就是那个负责干苦力的工人,核心字段:
- • probe/remove/shutdown/suspend/resume:核心回调函数
- • of_match_table:设备树匹配表(驱动开发中太重要了)
注册驱动的流程和注册设备互为镜像:
驱动注册调用driver_register() -> bus_add_driver() // 把驱动添加到总线的驱动链表 -> driver_attach() // 遍历总线上所有设备,调用bus.match进行匹配 -> 匹配成功就调用driver.probe(对应platform_driver里的probe)
平台总线上的驱动注册尤其要注意设置drv->driver.bus = &platform_bus_type,内核代码里__platform_driver_register强制把驱动的总线类型指向platform_bus_type。这意味着所有platform驱动都被自动归到platform总线的麾下。
2.4 三者联动核心关系
很多面试官喜欢问驱动模型核心思想是什么?
直接回答:总线管理设备和驱动,匹配成功后触发probe完成初始化,基本不会错。
三、核心工作机制:设备与驱动的匹配全过程
这里说驱动开发最核心的逻辑:设备和驱动怎么自动绑定?谁调用probe?
很多刚接触驱动的小伙伴天天都在纳闷:我代码里明明就写了一个 probe 函数,我也没在别的地方调它啊,它怎么自己就莫名其妙地跑起来了?这就涉及到了内核里最核心的匹配绑定机制。
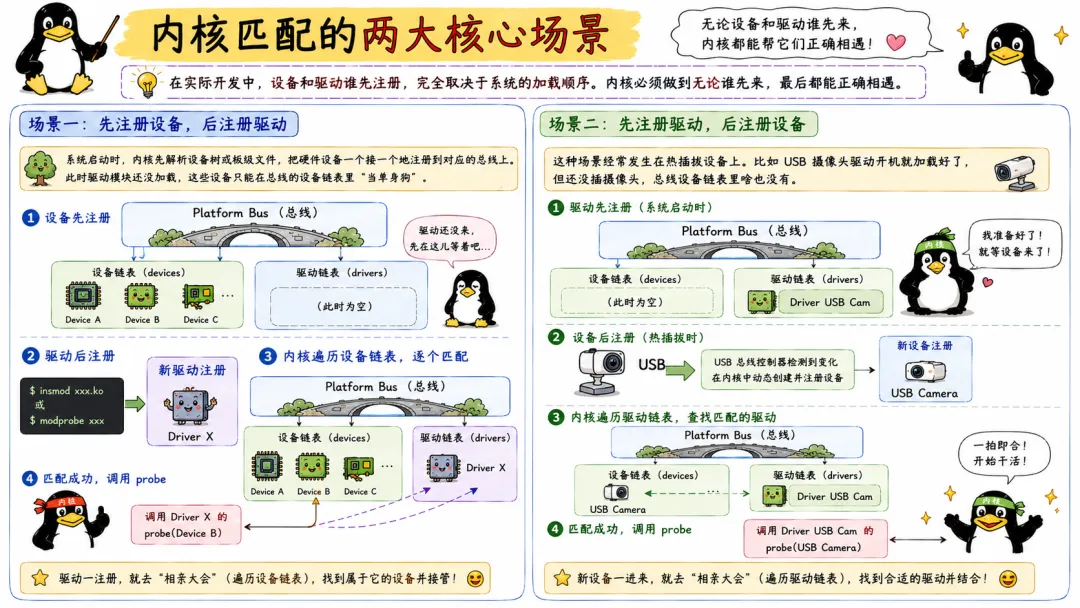
3.1 内核匹配的两大核心场景
在实际开发中,设备和驱动谁先注册,完全取决于系统的加载顺序。内核必须做到无论谁先来,最后都能正确相遇。
场景一:先注册设备,后注册驱动
这种情况在现代Linux系统里挺常见的。系统启动的时候,内核首先去解析设备树或者板级文件,把硬件设备一个接一个地注册到对应的总线上。这时候,由于对应的驱动模块还没加载(可能还在外设的 ko 文件里躺着呢),这些设备就只能静静地在总线的设备链表里当单身狗。过了会儿,用户态通过 insmod 或者 modprobe 把驱动模块给加载进来了。驱动一注册,内核就会带着这个驱动去遍历总线上的那条设备链表,挨个比对,最后把属于它的设备给领走。
场景二:先注册驱动,后注册设备
这种场景经常发生在热插拔设备上。比如你写了一个USB摄像头的驱动,系统一开机就把驱动给加载好了。这时候由于你还没插摄像头,总线的设备链表里啥也没有。等到哪天你突然把摄像头往USB接口上一怼,USB总线控制器捕获到了电信号的变化,立马在内核里动态创建了一个 struct device 并注册。新设备一进来,内核就拿着它去遍历已经存在的驱动链表,正好发现了那个嗷嗷待哺的摄像头驱动,当场一拍即合。
3.2 四大匹配规则优先级(面试高频,我能证明 )
如果你去面试Linux驱动岗位,十个面试官有九个会问:platform总线如何完成设备和驱动的匹配? 标准答案就是这四大规则:
1. 设备树匹配(最高优先级)
当内核开启设备树支持时,总线会调用of_driver_match_device(),对比设备节点的compatible属性和驱动of_match_table中定义的兼容性列表。
static conststruct of_device_id my_of_match[] = { { .compatible = "lckfb,mychardev" }, { /* sentinel */ }};MODULE_DEVICE_TABLE(of, my_of_match);staticstruct platform_driver my_driver = { .driver = { .name = "mychardev", .of_match_table = my_of_match, }, .probe = my_probe,};
设备树里这么写:
mychardev@0 { compatible = "lckfb,mychardev"; reg = <0x12340000 0x1000>; interrupts = <56>;};
只要compatible对上了,内核就知道这个驱动支持这个设备节点。
2. 设备ID表匹配
非设备树的场景(比如ACPI系统或者老式板级文件),使用platform_device_id表进行匹配。
static conststruct platform_device_id my_id_table[] = { { "mychardev-v1", (kernel_ulong_t) &my_device_data_v1 }, { "mychardev-v2", (kernel_ulong_t) &my_device_data_v2 }, { }};MODULE_DEVICE_TABLE(platform, my_id_table);
3. 名称字符串匹配
这是最原始、最直接的一种匹配方式。如果设备树匹配和ID表匹配都没命中,内核会退而求其次,比较设备的name字段和驱动的driver.name字段是否相同。
驱动里设置:
staticstruct platform_driver my_driver = { .driver = { .name = "mychardev", // 驱动名称 },};
设备的名称也要是mychardev才能匹配上。
不过这种匹配方式太死板,灵活性差,平台驱动开发中我基本不推荐用,除非有特殊限制。
4. 自定义match匹配(最低优先级)
总线可以注册自己的match函数,完全自定义匹配逻辑。比如说,pci总线就有自己复杂的匹配规则,不按常理出牌。不过一般业务驱动开发不会用到这一层,总线框架自己玩的东西。
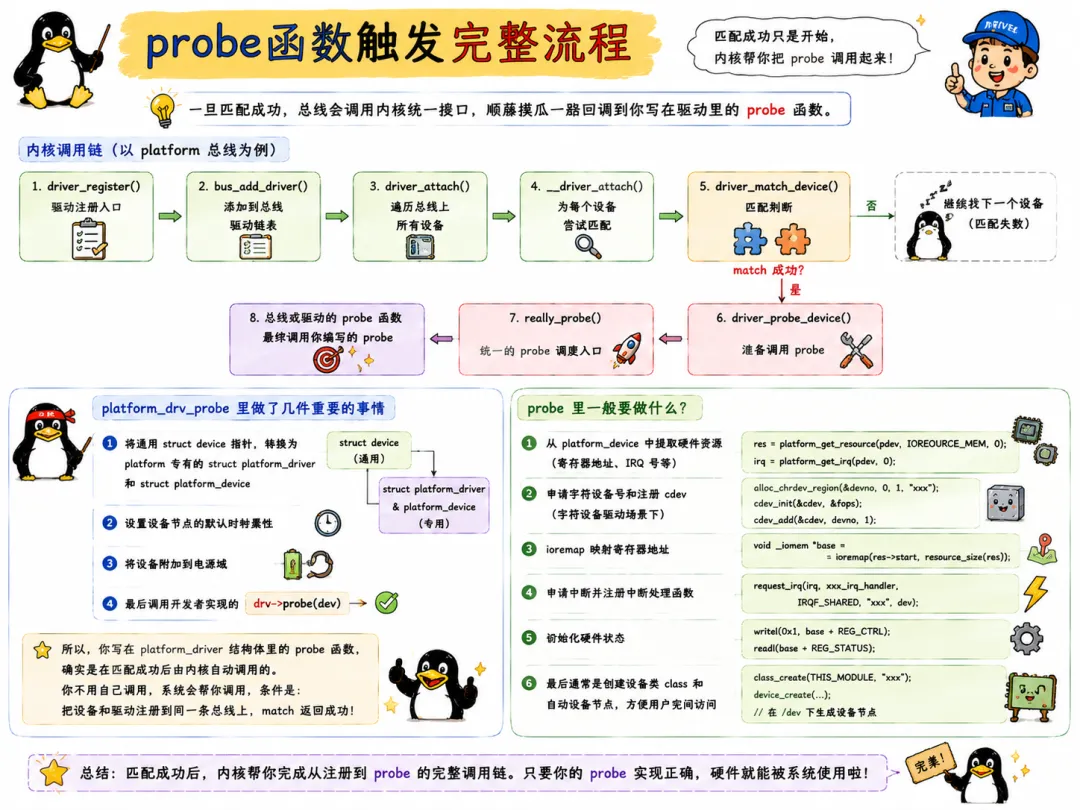
3.3 probe函数触发完整流程
一旦匹配成功,内核接下来要干的事情就顺理成章了,总线会调用内核的统一接口,顺藤摸瓜一路回调到你写在驱动里的 probe 函数。
拿platform总线来举例。前面提到,__platform_driver_register会把驱动的probe回调绑定到总线的probe层,最终调用链是这样的:
注册时调用driver_register() → bus_add_driver() → driver_attach() → __driver_attach() → 调用driver_match_device()进行匹配判断 → 如果匹配,调用driver_probe_device() → 最终调用really_probe() → 调用总线或驱动的probe函数。
针对platform总线,platform_drv_probe里做了几件重要的事情:
- 1. 将通用
struct device指针转换为platform专有的struct platform_driver和struct platform_device - 4. 最后调用开发者实现的
drv->probe(dev)
所以,你写在platform_driver结构体里的probe函数,确实是在匹配成功后由内核自动调用的。你不用自己调用,系统会帮你调用,条件是把设备和驱动注册到同一条总线上,match返回成功。
probe里一般要做什么?
- • 从
platform_device中提取硬件资源(寄存器地址、IRQ号等) - • 申请字符设备号和注册cdev(字符设备驱动场景下)
- • 最后通常是创建设备类class和自动设备节点,这样用户空间才能通过设备节点访问硬件
3.4 remove函数解绑机制
有probe就必须有remove,不然驱动卸载时内存就泄露得不成样子。remove函数在驱动卸载时被内核调用,职责是回收probe里占用的所有资源:
这个流程和 probe 刚好完全相反。在 probe 里你拿了多少好处,在 remove 里你就得一五一十全部吐出来。
对于platform驱动,新版本的Linux内核推荐使用remove_new(返回void),因为原来的remove返回int但返回值基本被忽略,新版本语义更清晰。
四、进阶核心:设备类、sysfs与udev用户态交互机制
Linux设备模型除了搞定内核内部的驱动匹配,还要解决一个问题:用户空间的应用程序怎么访问硬件?
答案藏在/sys和/dev这两个目录里。
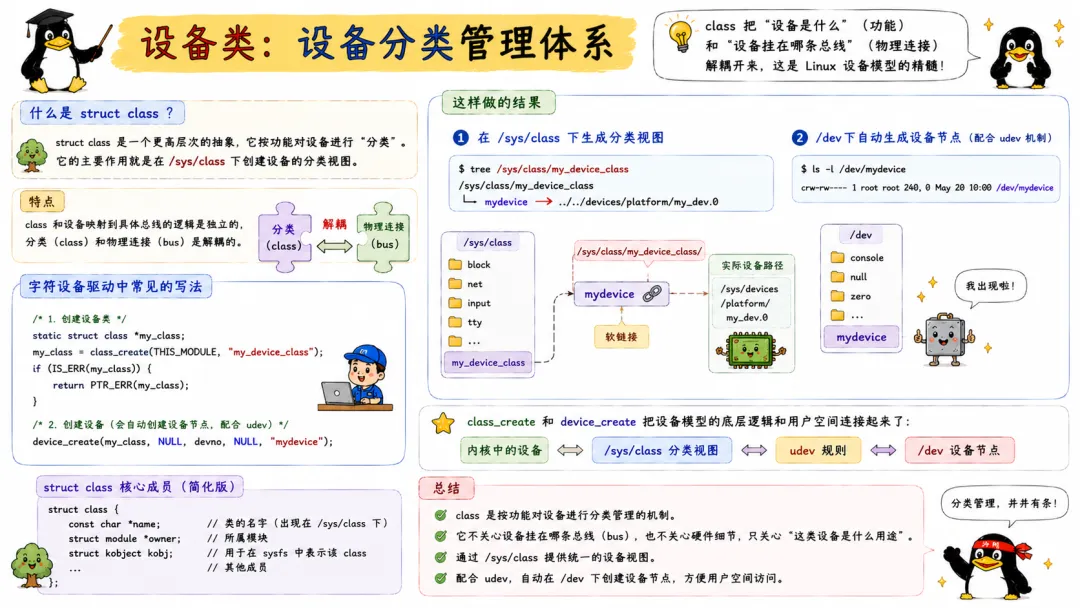
4.1 设备类:设备分类管理体系
struct class是一个更高层次的抽象,它按功能对设备进行"分类"。注意,class和设备映射到具体总线的逻辑是独立的,这是Linux设备模型的一大特点——分类和物理连接是解耦的。
这个结构体的主要作用就是在/sys/class下创建设备的分类视图。
在字符设备驱动里,我们经常会这么写:
staticstruct class *my_class;my_class = class_create(THIS_MODULE, "my_device_class");device_create(my_class, NULL, devno, NULL, "mydevice");
这样做的结果是:
- • 在/sys/class/my_device_class下面会生成一个软链接(或子目录)指向实际的设备路径
- • 同时,
/dev/mydevice会自动生成(配合udev机制)
class_create和device_create把设备模型的底层逻辑和用户空间连接起来了。
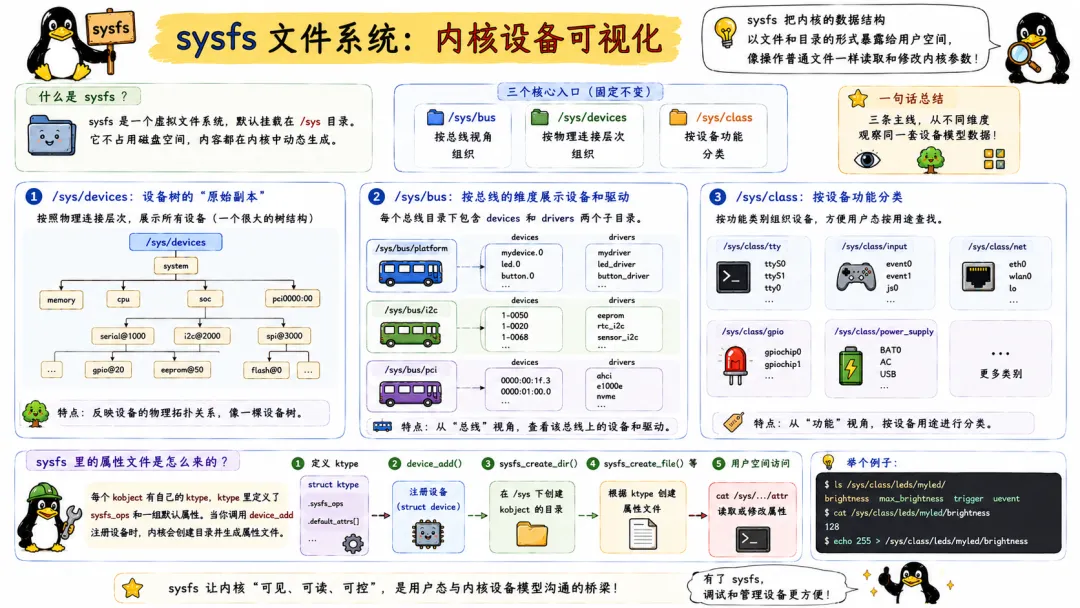
4.2 sysfs文件系统:内核设备可视化
sysfs是一个虚拟文件系统,默认挂载在/sys目录。它把内核的数据结构以文件和目录的形式暴露给用户空间,让你像操作普通文件一样读取和修改内核参数。
sysfs的目录结构有固定的三个核心入口:/sys/bus、/sys/devices、/sys/class。
- • /sys/devices是设备树的"原始副本",按照物理连接层次展示所有设备(一个很大的树结构)
- • /sys/bus以总线的维度展示设备和驱动:每个总线目录下包含
devices和drivers两个子目录,分别存放注册到该总线的设备和驱动 - • /sys/class按设备功能分类,方便用户态程序按用途查找设备
sysfs里那些属性文件是怎么来的呢?每个kobject有自己的ktype,ktype里定义了sysfs_ops和一组默认属性。当你调用device_add注册设备时,内核会通过sysfs_create_dir为kobject创建sysfs目录,并调用sysfs_create_file等函数创建属性文件。
通过sysfs调试设备参数实在是太方便了。举个例子,我要看一个platform设备的中断号是多少,直接cat /sys/devices/platform/xxx/uevent就能看到硬件信息(虽然最终用户态udev也能看到)。更常用的做法是:echo 0 > /sys/module/xxx/parameters/debug 来开关驱动debug日志。没有sysfs,这种运行时配置就难搞多了。
4.3 udev机制:自动创建设备节点
很多刚入门的开发者觉得很神奇——为什么驱动模块加载后,/dev目录下会自动出现我想要的设备节点?这背后是udev在发力。
系统启动阶段,内核通过devtmpfs在/dev下生成基础设备文件。然后udevd守护进程(用户空间)监听内核通过netlink发送的uevent事件,解析内核传递的环境变量,匹配/etc/udev/rules.d/下的规则,决定如何创建/删除设备节点、如何设置权限和属主、甚至加载/卸载驱动模块。
具体工作流程分两步:
- 1. 驱动程序通过class_create和device_create在/sys/class下创建分类标识和设备信息
- 2. udevd捕获到内核的uevent事件后,在/dev下动态生成对应的设备节点
这对用户空间应用程序来说,设备节点是确定的稳定入口,无需关心设备什么时候插拔。我U盘插上去瞬间/dev/sdb1就出现了,这是udev干的活。
做个冷热插拔的小实验:
当你注册一个设备节点时,驱动代码里调用了device_create,内核会通过kobject_uevent函数向用户空间发送"add"事件,udevd抓到事件后运行处理程序创建设备节点。
反过来,移除驱动时发送"remove"事件,udev删除节点。
在嵌入式设备开发中,很多人用mdev(一个轻量化的udev实现,常见于Busybox系统)来处理设备节点的动态创建。它在资源受限的环境中非常实用,功能虽比完整udev少,但核心设备节点自动创建的功能一点也不含糊。
五、实战:模型如何驱动真实硬件
5.1 案例1:platform总线 + 字符设备驱动开发流程
结合前面的理论,我们从头撸一个完整的platform字符设备驱动代码框架。
这个例子比较经典,可能和你平时写的有些出入,但核心逻辑是一样的:platform_driver负责匹配设备,cdev负责字符设备操作,sysfs和udev负责与用户空间的交互。
驱动部分框架如下:
#include <linux/module.h>#include <linux/kernel.h>#include <linux/platform_device.h>#include <linux/cdev.h>#include <linux/fs.h>#include <linux/device.h>#define DEV_NAME "mychardev"static int major;staticstruct class *my_class;static int my_open(struct inode *inode, struct file *file){ printk(KERN_INFO "my device opened\n"); return 0;}static ssize_t my_read(struct file *file, char __user *buf, size_t len, loff_t *off){ printk(KERN_INFO "my device read\n"); return 0;}static ssize_t my_write(struct file *file, const char __user *buf, size_t len, loff_t *off){ printk(KERN_INFO "my device written\n"); return len;}static conststruct file_operations my_fops = { .owner = THIS_MODULE, .open = my_open, .read = my_read, .write = my_write,};static int my_probe(struct platform_device *pdev){ printk(KERN_INFO "my_probe called!\n"); // 动态申请设备号并注册cdev major = register_chrdev(0, DEV_NAME, &my_fops); if (major < 0) { printk(KERN_ERR "register_chrdev failed\n"); return major; } // 自动创建设备节点需要class my_class = class_create(THIS_MODULE, DEV_NAME); if (IS_ERR(my_class)) { unregister_chrdev(major, DEV_NAME); return PTR_ERR(my_class); } device_create(my_class, NULL, MKDEV(major, 0), NULL, DEV_NAME); return 0;}static int my_remove(struct platform_device *pdev){ printk(KERN_INFO "my_remove called!\n"); device_destroy(my_class, MKDEV(major, 0)); class_destroy(my_class); unregister_chrdev(major, DEV_NAME); return 0;}static conststruct of_device_id my_of_match[] = { { .compatible = "lckfb,mychardev" }, { /* sentinel */ }};MODULE_DEVICE_TABLE(of, my_of_match);staticstruct platform_driver my_driver = { .probe = my_probe, .remove_new = my_remove, .driver = { .name = "mychardev", .of_match_table = my_of_match, },};module_platform_driver(my_driver);MODULE_LICENSE("GPL");MODULE_AUTHOR("Your Name");MODULE_DESCRIPTION("Platform Char Device Demo");
编译加载后:
insmod mydriver.kocat /proc/devices # 看到mychardev对应主设备号ls /dev/mychardev # 设备节点已生成echo "hello" > /dev/mychardev # 触发write回调cat /dev/mychardev # 触发read回调rmmod mydriver # 触发remove,设备节点被删除
5.2 案例2:设备树(Device Tree)的应用
随着设备树的普及,我建议不要再把硬件信息写到platform_device结构体里初始化。维护一个c文件描述I2C/SPI/GPIO的寄存器地址和中断号,会导致内核代码和硬件信息紧耦合,换一块板子就得重新编译内核。设备树就是来救场的——把板级硬件信息从内核代码抽离出来,放到dts文件中。
设备树匹配驱动的核心就是compatible属性:驱动中的of_match_table和设备树节点的compatible能对应上,内核就会匹配并调用probe。
写DTS文件大致分成两步。
首先,编写dts文件(或dtsi片段):
/ { my_device: mychardev@0 { compatible = "lckfb,mychardev"; reg = <0x12340000 0x1000>; interrupts = <56>; status = "okay"; };};
然后驱动端声明of_match_table,告诉内核我的驱动支持哪些compatible字符串。
内核在启动过程中处理DTB(设备树二进制文件),把它解析成device_node树,然后为每个节点创建platform_device、i2c_client等设备实例,资源(内存地址、IRQ号)也随之传递。驱动中的probe被调用时,从platform_device中提取硬件资源并初始化硬件。
5.3 调试与工具
做底层驱动开发,写代码往往只占两成时间,剩下八成时间全在调试 Bug。
内核是个小黑盒,要是出了问题,我们怎么知道设备模型里到底哪儿掉链子了?
(1)sysfs节点监控
- •
ls /sys/bus/platform/devices/:查看所有平台设备 - •
ls /sys/bus/platform/drivers/:查看所有平台驱动 - •
cat /sys/devices/platform/xxx/uevent:查看设备的硬件资源信息 - •
echo 0 > /sys/module/xxx/parameters/debug:动态开关驱动调试(前提是模块有可调参数) - •
tree /sys/class/xxx:查看设备分类视图,快速定位某个设备是否注册成功
(2)uevent事件的捕获与分析
直接运行udevadm monitor --property,可以看到内核发出的完整uevent事件(包括action、devpath、major/minor等关键信息),这对调试设备节点没自动生成的问题非常非常有用。
(3)内核日志与调试技巧
- •
dmesg | tail:实时查看probe/remove日志 - •
echo 8 > /proc/sys/kernel/printk:提高内核日志输出级别 - • 动态调试:在内核中配置CONFIG_DYNAMIC_DEBUG,然后
echo "file mydriver.c +p" > /sys/kernel/debug/dynamic_debug/control来动态控制打印 - •
insmod时加上dyndbg=+p参数可以启用模块的调试打印
就拿uevent监控来说,曾经有一个项目里deamon进程总是拿不到设备节点,我通过udevadm monitor发现内核根本没往用户空间发add事件。最后排查到驱动中的class_create调晚了一步,device_add先完成,所以sysfs下设备类目录没生成,udev自然没法工作——这能看出内核和用户空间的交互时机有多敏感。
驱动模型的核心概念:
udevadm monitor --property # 看内核发什么事件tree /sys/class/ # 看设备类是否注册好dmesg -w # 看probe报什么错误
如果一个设备匹配了但probe没跑起来,多半是中断号、内存地址、DMA通道那部分资源解析出问题了,去/sys/devices/platform/<设备>/uevent里cat一下看资源是不是空的。