🔌 从一次深夜排障说起
那是个周五晚上快十点,车间里一台注塑机的温控模块突然开始报警。我盯着那台老掉牙的Windows工控机,心里清楚——问题不在硬件,在通信。
Modbus RTU。工业现场用了三十年的协议,简单、粗暴、好用。但要给它写一个像样的上位机界面?这事儿没那么轻松。
很多人第一反应是用tkinter凑合,结果界面丑得像上世纪的DOS程序;也有人直接上Qt,但Python绑定的配置能让人头疼半天。其实有个更优雅的路子——CustomTkinter + pymodbus,现代化UI加上成熟的Modbus库,组合起来既好看又好用。
这篇文章把我在几个实际项目里踩过的坑、总结出来的经验,完整地梳理一遍。代码可以直接跑,逻辑也讲清楚,不玩虚的。
🧰 环境准备与依赖安装
先把工具链理清楚。Windows环境下,建议用Python 3.10或3.11,兼容性最稳。
bash1pip install customtkinter pymodbus pyserial
三个包,各司其职:
- ▸ customtkinter:现代化UI框架,基于tkinter但视觉效果天差地别
- ▸ pymodbus:工业级Modbus协议栈,RTU/TCP都支持
- ▸ pyserial:串口底层通信,pymodbus的依赖,顺手装上
装完之后验证一下:
python1import customtkinter as ctk2import pymodbus3print(ctk.__version__, pymodbus.__version__)
没报错就行。
🏗️ 整体架构设计
写工控上位机,最忌讳把所有逻辑塞进一个文件。我见过那种三千行的"超级脚本",改一个参数要找半小时——这是在给自己埋雷。
咱们这次采用三层分离的思路:
1project/2├── main.py # 程序入口3├── modbus_client.py # 通信层:只管收发数据4├── data_model.py # 数据层:状态管理和数据转换5└── ui_app.py # 视图层:界面渲染和用户交互
通信层不知道界面长什么样,界面层不关心字节怎么拼。这种解耦在后期维护时价值巨大——相信我,设备型号一换,你只需要改通信层。
📡 通信层:Modbus RTU客户端封装
这是整个程序的核心。pymodbus的API设计得比较底层,直接用有点啰嗦,封装一下更顺手。
python1# modbus_client.py2import threading3import time4from pymodbus.client import ModbusSerialClient5from pymodbus.exceptions import ModbusException678class ModbusRTUClient:9"""10 Modbus RTU 通信客户端封装11 线程安全,支持自动重连12 """13def __init__(self, port: str, baudrate: int = 9600,14 bytesize: int = 8, parity: str = 'N',15 stopbits: int = 1, timeout: float = 1.0):16 self._port = port17 self._baudrate = baudrate18 self._timeout = timeout19 self._lock = threading.Lock() # 关键:串口访问必须加锁20 self._connected = False2122 self._client = ModbusSerialClient(23 port=port,24 baudrate=baudrate,25 bytesize=bytesize,26 parity=parity,27 stopbits=stopbits,28 timeout=timeout29 )3031def connect(self) -> bool:32"""建立连接,返回是否成功"""33try:34 result = self._client.connect()35 self._connected = result36return result37except Exception as e:38print(f"[Modbus] 连接失败: {e}")39 self._connected = False40return False41def disconnect(self):42"""断开连接"""43if self._client:44 self._client.close()45 self._connected = False4647@property48def is_connected(self) -> bool:49return self._connected5051def read_holding_registers(self, slave_id: int,52 address: int, count: int) -> list | None:53"""54 读取保持寄存器(功能码 0x03)55 返回寄存器值列表,失败返回 None """56with self._lock:57try:58 response = self._client.read_holding_registers(59 address=address,60 count=count,61 device_id=slave_id62 )63if response.isError():64print(f"[Modbus] 读取错误: {response}")65return None66return response.registers67except ModbusException as e:68print(f"[Modbus] 协议异常: {e}")69 self._connected = False70return None except Exception as e:71print(f"[Modbus] 未知错误: {e}")72return None7374def write_single_register(self, slave_id: int,75 address: int, value: int) -> bool:76"""77 写单个保持寄存器(功能码 0x06)78 返回是否写入成功79 """ with self._lock:80try:81 response = self._client.write_register(82 address=address,83 value=value,84 device_id=slave_id85 )86return not response.isError()87except Exception as e:88print(f"[Modbus] 写入失败: {e}")89return False9091def read_coils(self, slave_id: int,92 address: int, count: int) -> list | None:93"""读取线圈状态(功能码 0x01)"""94with self._lock:95try:96 response = self._client.read_coils(97 address=address,98 count=count,99 device_id=slave_id100 )101if response.isError():102return None103return response.bits[:count]104except Exception as e:105print(f"[Modbus] 线圈读取失败: {e}")106return None
有几个细节值得说一下。threading.Lock()是必须的——如果UI线程和轮询线程同时操作串口,数据会乱掉,这个Bug极难复现,但一旦出现就是灾难性的。另外,response.isError()这个判断很多人忘写,导致把错误响应当正常数据处理,然后困惑为什么数值不对。
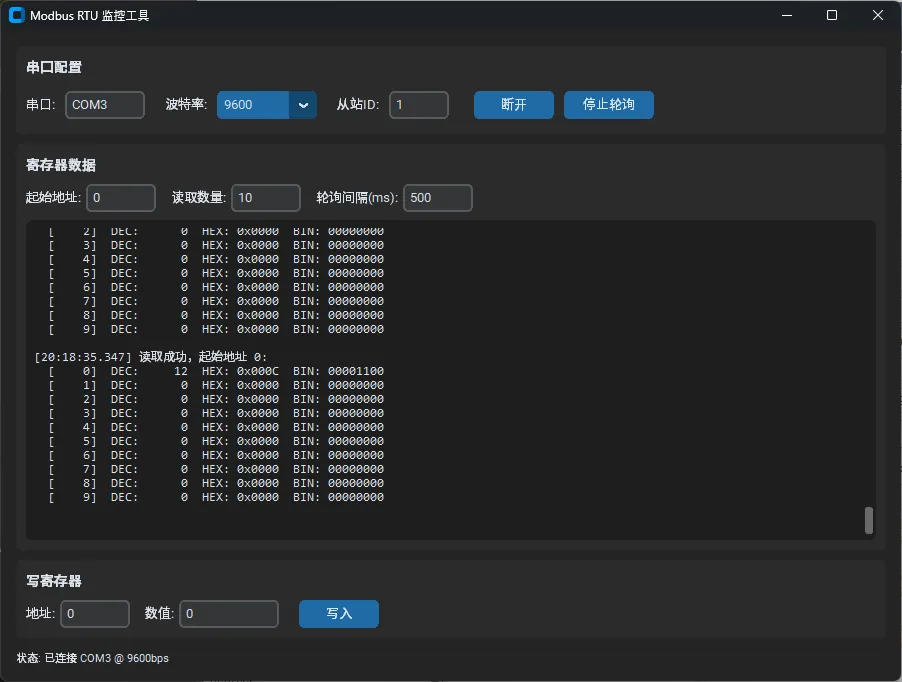
🖥️ 界面层:CustomTkinter UI构建
CustomTkinter的优势在于它自带深色/浅色主题切换,而且控件风格比原生tkinter现代得多。工控软件通常跑在工厂环境里,深色主题对操作人员眼睛更友好。
python1# ui_app.py2import customtkinter as ctk3import threading4import time5from modbus_client import ModbusRTUClient67# 全局主题设置8ctk.set_appearance_mode("dark")9ctk.set_default_color_theme("blue")101112class ModbusApp(ctk.CTk):13"""主应用窗口"""1415def __init__(self):16super().__init__()1718 self.title("Modbus RTU 监控工具")19 self.geometry("900x650")20 self.resizable(True, True)2122 self._client: ModbusRTUClient | None = None23 self._polling = False24 self._poll_thread: threading.Thread | None = None2526 self._build_ui()2728def _build_ui(self):29"""构建整体布局"""30# 顶部连接配置栏31 self._build_connection_frame()32# 中部数据展示区33 self._build_data_frame()34# 底部写入控制区35 self._build_write_frame()36# 状态栏37 self._build_status_bar()3839def _build_connection_frame(self):40"""连接参数配置区域"""41 frame = ctk.CTkFrame(self)42 frame.pack(fill="x", padx=15, pady=(15, 5))4344 ctk.CTkLabel(frame, text="串口配置",45 font=ctk.CTkFont(size=14, weight="bold")).pack(46 anchor="w", padx=10, pady=(8, 4))4748 params_frame = ctk.CTkFrame(frame, fg_color="transparent")49 params_frame.pack(fill="x", padx=10, pady=(0, 10))5051# 串口号52 ctk.CTkLabel(params_frame, text="串口:").grid(53 row=0, column=0, padx=(0, 5), pady=5)54 self.port_var = ctk.StringVar(value="COM3")55 ctk.CTkEntry(params_frame, textvariable=self.port_var,56 width=80).grid(row=0, column=1, padx=5)5758# 波特率59 ctk.CTkLabel(params_frame, text="波特率:").grid(60 row=0, column=2, padx=(15, 5))61 self.baud_var = ctk.StringVar(value="9600")62 ctk.CTkOptionMenu(params_frame,63 values=["1200", "2400", "4800",64"9600", "19200", "38400", "115200"],65 variable=self.baud_var,66 width=100).grid(row=0, column=3, padx=5)6768# 从站ID69 ctk.CTkLabel(params_frame, text="从站ID:").grid(70 row=0, column=4, padx=(15, 5))71 self.slave_var = ctk.StringVar(value="1")72 ctk.CTkEntry(params_frame, textvariable=self.slave_var,73 width=60).grid(row=0, column=5, padx=5)7475# 连接/断开按钮76 self.connect_btn = ctk.CTkButton(77 params_frame, text="连接",78 width=80, command=self._toggle_connection)79 self.connect_btn.grid(row=0, column=6, padx=(20, 5))8081# 轮询开关82 self.poll_btn = ctk.CTkButton(83 params_frame, text="开始轮询",84 width=90, state="disabled",85 command=self._toggle_polling)86 self.poll_btn.grid(row=0, column=7, padx=5)8788def _build_data_frame(self):89"""数据展示区域"""90 frame = ctk.CTkFrame(self)91 frame.pack(fill="both", expand=True, padx=15, pady=5)9293 ctk.CTkLabel(frame, text="寄存器数据",94 font=ctk.CTkFont(size=14, weight="bold")).pack(95 anchor="w", padx=10, pady=(8, 4))9697# 读取配置行98 read_cfg = ctk.CTkFrame(frame, fg_color="transparent")99 read_cfg.pack(fill="x", padx=10)100101 ctk.CTkLabel(read_cfg, text="起始地址:").pack(side="left")102 self.read_addr_var = ctk.StringVar(value="0")103 ctk.CTkEntry(read_cfg, textvariable=self.read_addr_var,104 width=70).pack(side="left", padx=5)105106 ctk.CTkLabel(read_cfg, text="读取数量:").pack(side="left", padx=(10, 0))107 self.read_count_var = ctk.StringVar(value="10")108 ctk.CTkEntry(read_cfg, textvariable=self.read_count_var,109 width=70).pack(side="left", padx=5)110111 ctk.CTkLabel(read_cfg, text="轮询间隔(ms):").pack(112 side="left", padx=(10, 0))113 self.interval_var = ctk.StringVar(value="500")114 ctk.CTkEntry(read_cfg, textvariable=self.interval_var,115 width=70).pack(side="left", padx=5)116117# 数据显示文本框118 self.data_text = ctk.CTkTextbox(frame, height=280,119 font=ctk.CTkFont(120 family="Consolas", size=12))121 self.data_text.pack(fill="both", expand=True,122 padx=10, pady=(8, 10))123 self.data_text.insert("end", "等待连接...\n")124125def _build_write_frame(self):126"""写寄存器控制区域"""127 frame = ctk.CTkFrame(self)128 frame.pack(fill="x", padx=15, pady=5)129130 ctk.CTkLabel(frame, text="写寄存器",131 font=ctk.CTkFont(size=14, weight="bold")).pack(132 anchor="w", padx=10, pady=(8, 4))133134 write_row = ctk.CTkFrame(frame, fg_color="transparent")135 write_row.pack(fill="x", padx=10, pady=(0, 10))136137 ctk.CTkLabel(write_row, text="地址:").pack(side="left")138 self.write_addr_var = ctk.StringVar(value="0")139 ctk.CTkEntry(write_row, textvariable=self.write_addr_var,140 width=70).pack(side="left", padx=5)141142 ctk.CTkLabel(write_row, text="数值:").pack(side="left", padx=(10, 0))143 self.write_val_var = ctk.StringVar(value="0")144 ctk.CTkEntry(write_row, textvariable=self.write_val_var,145 width=100).pack(side="left", padx=5)146147 self.write_btn = ctk.CTkButton(148 write_row, text="写入", width=80,149 state="disabled", command=self._do_write)150 self.write_btn.pack(side="left", padx=(15, 0))151152def _build_status_bar(self):153"""底部状态栏"""154 self.status_var = ctk.StringVar(value="未连接")155 status_bar = ctk.CTkLabel(self, textvariable=self.status_var,156 anchor="w",157 font=ctk.CTkFont(size=11))158 status_bar.pack(fill="x", padx=15, pady=(2, 8))159160# ── 业务逻辑方法 ──────────────────────────────────────161162def _toggle_connection(self):163if self._client and self._client.is_connected:164 self._stop_polling()165 self._client.disconnect()166 self._client = None167 self.connect_btn.configure(text="连接")168 self.poll_btn.configure(state="disabled")169 self.write_btn.configure(state="disabled")170 self._set_status("已断开连接")171else:172 port = self.port_var.get().strip()173 baud = int(self.baud_var.get())174 self._client = ModbusRTUClient(port=port, baudrate=baud)175if self._client.connect():176 self.connect_btn.configure(text="断开")177 self.poll_btn.configure(state="normal")178 self.write_btn.configure(state="normal")179 self._set_status(f"已连接 {port} @ {baud}bps")180else:181 self._client = None182 self._set_status(f"连接失败,请检查串口 {port} 是否可用")183184def _toggle_polling(self):185if self._polling:186 self._stop_polling()187else:188 self._start_polling()189190def _start_polling(self):191 self._polling = True192 self.poll_btn.configure(text="停止轮询")193 self._poll_thread = threading.Thread(194 target=self._poll_loop, daemon=True)195 self._poll_thread.start()196197def _stop_polling(self):198 self._polling = False199 self.poll_btn.configure(text="开始轮询")200201def _poll_loop(self):202"""轮询线程:定期读取寄存器数据"""203while self._polling and self._client:204try:205 addr = int(self.read_addr_var.get())206 count = int(self.read_count_var.get())207 interval = int(self.interval_var.get()) / 1000.0208 slave = int(self.slave_var.get())209except ValueError:210 time.sleep(0.5)211continue212213 regs = self._client.read_holding_registers(slave, addr, count)214215# 注意:tkinter控件只能在主线程操作,用after()调度216if regs is not None:217 self.after(0, self._update_display, addr, regs)218else:219 self.after(0, self._set_status, "读取失败,设备无响应")220221 time.sleep(interval)222223def _update_display(self, start_addr: int, regs: list):224"""更新数据显示(在主线程执行)"""225import datetime226 ts = datetime.datetime.now().strftime("%H:%M:%S.%f")[:-3]227228 lines = [f"[{ts}] 读取成功,起始地址 {start_addr}:"]229for i, val in enumerate(regs):230 addr = start_addr + i231 lines.append(f" [{addr:>5}] DEC: {val:>6} "232f"HEX: 0x{val:04X} BIN: {val:08b}")233 lines.append("")234235 self.data_text.insert("end", "\n".join(lines) + "\n")236 self.data_text.see("end") # 自动滚动到底部237238# 防止文本框内容无限增长,超过500行就清一次239 line_count = int(self.data_text.index("end-1c").split(".")[0])240if line_count > 500:241 self.data_text.delete("1.0", "100.0")242243def _do_write(self):244"""执行寄存器写入"""245if not self._client:246return247try:248 addr = int(self.write_addr_var.get())249 val = int(self.write_val_var.get())250 slave = int(self.slave_var.get())251except ValueError:252 self._set_status("写入参数格式错误")253return254255if not (0 <= val <= 65535):256 self._set_status("寄存器值必须在 0 ~ 65535 范围内")257return258259 success = self._client.write_single_register(slave, addr, val)260if success:261 self._set_status(f"写入成功:地址 {addr} = {val}")262else:263 self._set_status(f"写入失败:地址 {addr}")264265def _set_status(self, msg: str):266 self.status_var.set(f"状态: {msg}")267268def on_closing(self):269"""窗口关闭时的清理工作"""270 self._stop_polling()271if self._client:272 self._client.disconnect()273 self.destroy()
🚀 程序入口
python1# main.py2from ui_app import ModbusApp345def main():6 app = ModbusApp()7 app.protocol("WM_DELETE_WINDOW", app.on_closing)8 app.mainloop()91011if __name__ == "__main__":12main()
就这么简单。WM_DELETE_WINDOW这个钩子一定要挂上,不然用户直接关窗口,轮询线程和串口连接不会被正确清理,偶发的资源泄漏就是这么来的。
⚠️ 常见坑位与解决方案
坑一:串口被占用。Windows下如果设备管理器里串口号对了但就是连不上,先检查有没有其他程序(比如另一个终端软件)占着那个COM口。pymodbus连接失败时报错信息不够直观,这种情况容易被误判为代码问题。
坑二:tkinter跨线程操作。这是新手最容易踩的雷。绝对不能在子线程里直接操作任何tkinter控件,必须用self.after(0, callback)把操作调度回主线程。上面代码里_update_display和_set_status都是通过after()调用的,这个模式要记牢。
坑三:寄存器地址偏移。Modbus协议里地址有"协议地址"和"寄存器编号"两种表达方式,有些设备手册写的是从1开始的编号,但pymodbus的地址参数是从0开始的。如果读出来的数据对不上,先把地址减1试试。
坑四:波特率和校验位不匹配。RTU通信对串口参数极其敏感,波特率、数据位、停止位、奇偶校验必须和设备完全一致,任何一个不对都是无响应。没有设备手册的时候,9600-8-N-1是最常见的默认配置,先试这个。
💡 进阶扩展方向
这套框架搭好之后,扩展起来很顺畅。几个实用方向:
数据持久化:把轮询到的数据写入SQLite,配合matplotlib就能画出实时曲线,做趋势分析。
报警逻辑:在_update_display里加阈值判断,超限时用winsound模块触发声音报警,或者调用邮件/短信API推送通知。
多设备管理:把ModbusRTUClient改成支持多个串口实例,UI上加一个设备列表,切换不同从站地址——这就是一个完整的多点监控系统雏形了。
配置文件持久化:用configparser把串口参数、从站ID这些配置保存到ini文件,下次启动自动加载,省去重复填写的麻烦。
📝 写在最后
Modbus RTU这个协议活了这么多年,靠的是简单可靠。用Python来写上位机,生态成熟、开发快,CustomTkinter解决了"界面难看"这个老大难问题。
整个项目的核心思路就一句话:通信层、数据层、视图层各管各的,线程安全不能省,串口参数必须对。把这三点做扎实,剩下的都是功能堆叠的事儿。
源码结构清晰,可以直接在此基础上扩展,适配各种工业设备。如果在实际项目里遇到特定设备的适配问题,欢迎在评论区聊聊,说不定正好踩过同样的坑。
标签:PythonCustomTkinterModbus RTU工业通信串口编程