Linux pthread 常用函数实战 —— 从 create 到 TLS
一行 pthread_create 起线程很简单,但要安全地停下、等到它退出、回收资源、还能传数据回来 —— 一套 pthread API 才够用。这篇把最常用的 14 个函数串起来,每个配最小可运行的 demo。
0. 一个钩子例子
把 1 ~ 10 亿求和,单线程跑约 2 秒。开 4 个线程并行算,每个负责 1/4,理论上能压到 0.5 秒。
主线程 ├─ worker 1:1 ~ 2.5 亿 ├─ worker 2:2.5 亿 ~ 5 亿 ├─ worker 3:5 亿 ~ 7.5 亿 └─ worker 4:7.5 亿 ~ 10 亿主线程等所有 worker 完成 → 把 4 个结果加起来
这一个场景就用到:
pthread_createpthread_joinpthread_exitpthread_self
下面一个一个看。
1. 线程生命周期:create / join / detach / exit
1.1 pthread_create —— 起线程
intpthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine)(void *), void *arg);
| |
|---|
thread | |
attr | 属性(栈大小、是否 detached 等),传 NULL 用默认 |
start_routine | |
arg | |
最小例子:
#include<pthread.h>#include<stdio.h>void *worker(void *arg){ int id = *(int *)arg; printf("worker %d running\n", id); return NULL;}intmain(void){ pthread_t tid; int id = 42; pthread_create(&tid, NULL, worker, &id); pthread_join(tid, NULL); return 0;}
⚠️ arg 的生命周期:上面这个例子主线程 pthread_join 阻塞着,所以 id 这个栈变量是活的。如果改成 pthread_detach 不等就 return,id 已经被回收,worker 读到的就是垃圾。
1.2 pthread_exit —— 主动退出 + 带返回值
voidpthread_exit(void *retval);
retval 会被 pthread_join 拿到。直接 return 等价于 pthread_exit:
void *worker(void *arg){ long sum = 0; for (int i = 1; i <= 1000000; i++) sum += i; return (void *)sum; // 等价于 pthread_exit((void *)sum)}
1.3 pthread_join —— 阻塞等退出 + 拿返回值 + 回收资源
intpthread_join(pthread_t thread, void **retval);
阻塞当前线程,等 thread 退出,把它的返回值写到 retval。
⚠️ 不 join 也不 detach = 线程退出后资源永远不回收(“僵尸线程”),是常见的资源泄漏原因。
把开头那个并行求和例子完整写出来:
#include<pthread.h>#include<stdio.h>#define N 4#define TOTAL 1000000000Ltypedef struct { long start, end;} range_t;void *sum_range(void *arg){ range_t *r = arg; long s = 0; for (long i = r->start; i <= r->end; i++) s += i; return (void *)s;}intmain(void){ pthread_t tids[N]; range_t ranges[N]; long step = TOTAL / N; long total = 0; for (int i = 0; i < N; i++) { ranges[i].start = i * step + 1; ranges[i].end = (i + 1) * step; pthread_create(&tids[i], NULL, sum_range, &ranges[i]); } for (int i = 0; i < N; i++) { void *ret; pthread_join(tids[i], &ret); // 等退出 + 拿返回值 total += (long)ret; } printf("sum = %ld\n", total); return 0;}
1.4 pthread_detach —— “我不打算等了”
intpthread_detach(pthread_t thread);
线程被分离后:
适用场景:fire-and-forget 的后台任务,比如日志写入、心跳上报、网络服务的 per-connection handler。
void *background_log(void *arg){ while (1) { write_log_to_disk(); sleep(1); } return NULL;}intmain(void){ pthread_t tid; pthread_create(&tid, NULL, background_log, NULL); pthread_detach(tid); // 不打算等了 do_main_work(); return 0;}
也可以在创建时直接设 PTHREAD_CREATE_DETACHED 属性:
pthread_attr_t attr;pthread_attr_init(&attr);pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);pthread_create(&tid, &attr, ...);pthread_attr_destroy(&attr);
2. 取消机制:cancel / cleanup / state / type
2.1 pthread_cancel —— 请求其他线程退出
intpthread_cancel(pthread_t thread);
向目标线程发取消请求。注意:只是请求,不是强制退出。目标线程在到达"取消点"(cancellation point)时才真的退出。
常见的取消点:read / write / poll / sleep / pthread_cond_wait / pthread_join 等阻塞 syscall。完整列表见 man 7 pthreads。
例子:可中断的下载
void *download_worker(void *arg){ while (more_data) { int n = recv(sock, buf, sizeof(buf), 0); // 取消点 write(file, buf, n); // 取消点 } return NULL;}intmain(void){ pthread_t tid; pthread_create(&tid, NULL, download_worker, NULL); sleep(5); pthread_cancel(tid); // 5 秒后取消下载 pthread_join(tid, NULL); return 0;}
2.2 pthread_cleanup_push / pop —— cancel 安全的资源释放
线程在阻塞点被 cancel 时,已经持有的资源(mutex、内存、文件、socket 等)需要自动释放。用 cleanup handler:
void cleanup_unlock(void *arg) { pthread_mutex_unlock((pthread_mutex_t *)arg);}void *worker(void *arg) { pthread_mutex_lock(&m); pthread_cleanup_push(cleanup_unlock, &m); // 注册 handler pthread_cond_wait(&cv, &m); // 取消点;如果被 cancel,handler 会被自动调 pthread_cleanup_pop(1); // 1 = 执行 handler;0 = 仅注销 return NULL;}
⚠️ cleanup_push 和 cleanup_pop 必须配对在同一个作用域,因为它们底层是宏,依赖局部变量做记账。
2.3 pthread_setcancelstate / setcanceltype —— 控制何时响应
intpthread_setcancelstate(int state, int *oldstate);// PTHREAD_CANCEL_ENABLE - 默认// PTHREAD_CANCEL_DISABLE - 屏蔽 cancel(请求被挂起,state 改回 ENABLE 后才生效)intpthread_setcanceltype(int type, int *oldtype);// PTHREAD_CANCEL_DEFERRED - 默认,到 cancellation point 才取消// PTHREAD_CANCEL_ASYNCHRONOUS - 立即取消(很危险,几乎不用)
进入临界区前可以暂时禁用 cancel:
int oldstate;pthread_setcancelstate(PTHREAD_CANCEL_DISABLE, &oldstate);do_critical_thing();pthread_setcancelstate(oldstate, NULL);
2.4 pthread_testcancel —— 显式检查
如果一段代码完全没有 cancellation point(比如纯 CPU 循环),又想响应 cancel,手动插入:
for (int i = 0; i < 1000000; i++) { do_calc(i); if (i % 1000 == 0) pthread_testcancel(); // 显式检查}
3. 线程标识:self / setname_np
3.1 pthread_self —— 拿自己的 tid
pthread_tpthread_self(void);
调试 log 常用:
printf("[tid=%lu] processing\n", (unsigned long)pthread_self());
⚠️ pthread_t 在 glibc 上是 unsigned long,但 POSIX 标准没规定具体类型。跨平台代码要用 pthread_equal(t1, t2) 比较,不要直接用 ==。
3.2 pthread_setname_np —— 设线程名(调试用)
intpthread_setname_np(pthread_t thread, constchar *name);
线程名最长 16 字节(含 \0)。设了之后 top -H、ps -eL、htop、gdb info threads 都能看到,调试很方便:
void *worker(void *arg) { pthread_setname_np(pthread_self(), "downloader"); ...}
_np 后缀是 “non-portable”,但 Linux / BSD / macOS 都支持(macOS 上 pthread_setname_np 只接一个参数)。
4. 一次性初始化:pthread_once
intpthread_once(pthread_once_t *once_control, void (*init_routine)(void));
保证 init_routine 在多线程环境下只被执行一次,且其他线程会等第一次执行完。
经典场景:线程安全的单例 / 懒初始化。
#include<pthread.h>static pthread_once_t once = PTHREAD_ONCE_INIT;static config_t *g_config = NULL;staticvoidinit_config(void){ g_config = load_config_from_file();}config_t *get_config(void){ pthread_once(&once, init_config); return g_config;}
不管多少个线程同时调 get_config,init_config 只会执行一次,其他线程被阻塞到第一次执行完。
比"双重检查锁定"(DCLP)写法更简洁,且不会出错。
5. 线程局部存储(TLS):key_create / setspecific / getspecific
intpthread_key_create(pthread_key_t *key, void (*destructor)(void *));intpthread_setspecific(pthread_key_t key, constvoid *value);void *pthread_getspecific(pthread_key_t key);
每个线程拥有自己独立的"key 对应的值"。经典例子:errno 就是 TLS 实现的(每个线程的 errno 互不影响)。
static pthread_once_t once = PTHREAD_ONCE_INIT;static pthread_key_t my_key;staticvoiddestructor(void *value){ free(value);}staticvoidinit_key(void){ pthread_key_create(&my_key, destructor);}char *get_thread_buffer(void){ pthread_once(&once, init_key); char *buf = pthread_getspecific(my_key); if (!buf) { buf = malloc(1024); pthread_setspecific(my_key, buf); } return buf;}
线程退出时 destructor 自动被调用,释放各自的 buf。
C11 还提供 _Thread_local 关键字(gcc 也支持 __thread),更简洁:
__thread char buf[1024]; // 每个线程独立一份
只是 __thread 不能动态分配 + 自动释放,复杂场景还是用 pthread_key_*。
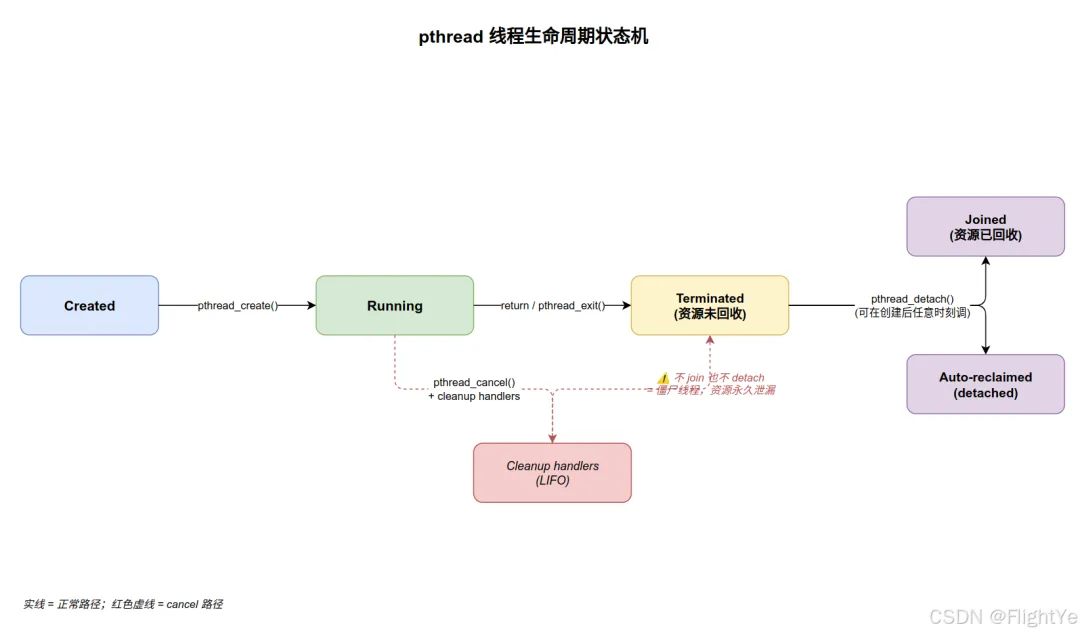
6. 线程生命周期一图流
线程从 pthread_create 进入 Running 状态后,有三条退出路径:
- 正常退出:
return 或 pthread_exit → Terminated - 被取消:
pthread_cancel 触发 + 到达 cancellation point → 执行 cleanup handlers → Terminated - 进程退出
Terminated 之后两条回收路径:
7. cancel 的完整流程
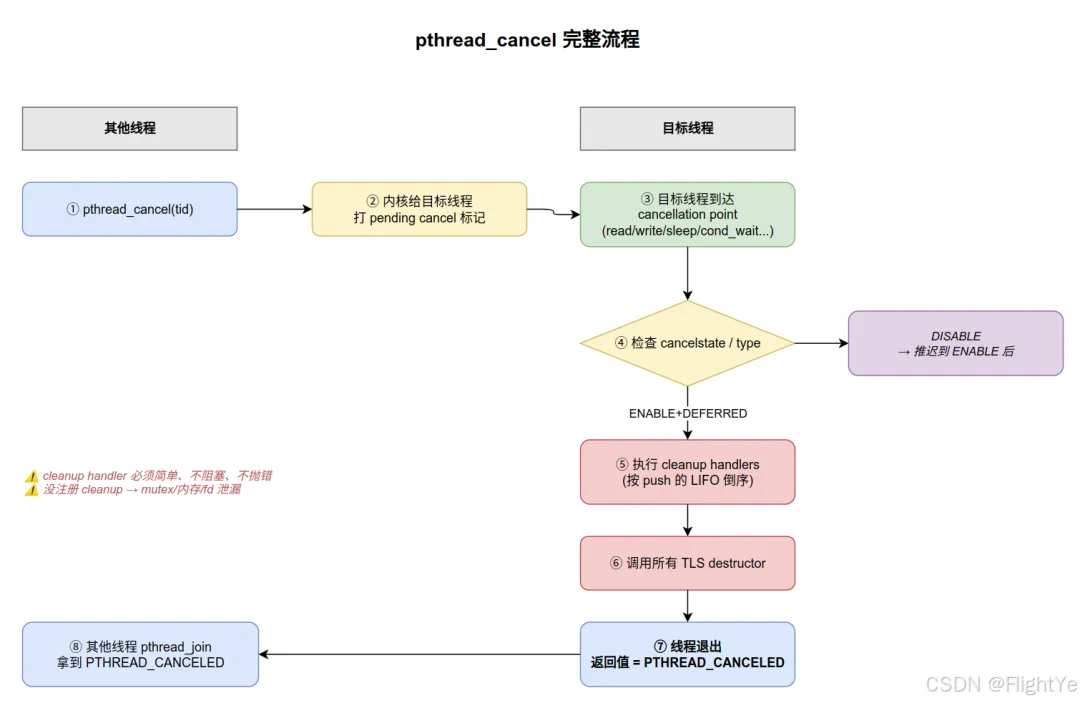 pthread_cancel(tid)` 调用后:
pthread_cancel(tid)` 调用后:
- 内核给目标线程标记一个 “pending cancel”
- 目标线程在到达 cancellation point 时检查标记
- 如果 cancelstate 是 ENABLE 且 type 是 DEFERRED → 触发取消
- 按 LIFO 倒序执行所有
pthread_cleanup_push 注册的 handler - 线程退出(相当于 pthread_exit(PTHREAD_CANCELED))
这条链路上任何一步崩了(比如 cleanup handler 自己抛异常),结果是 UB。所以 cleanup handler 必须简单、不阻塞、不抛错。
8. 总结表
| | |
|---|
pthread_create | | |
pthread_join | | |
pthread_detach | | |
pthread_exit | | |
pthread_self | | |
pthread_setname_np | | |
pthread_cancel | | |
pthread_cleanup_push/pop | | |
pthread_setcancelstate | | |
pthread_setcanceltype | | |
pthread_testcancel | | |
pthread_once | | |
pthread_key_create | | |
pthread_setspecific | | |
9. 最容易踩的 6 个坑
arg 生命周期:传栈变量给 detached 线程,主线程出栈后 worker 读到垃圾。要么 malloc,要么保证主线程比子线程活久。
不 join 也不 detach:线程退出后资源永远不回收,俗称"僵尸线程"。
double join:同一个 tid join 两次是 UB。join 完 tid 就失效了。
cancel 后没 cleanup:mutex / 内存 / 文件描述符泄漏。有 cancel 一定要有 cleanup_push。
cleanup_push/pop 不在同一作用域:编译报错(底层是宏 + 局部变量)。
pthread_t 类型假设:不要假设它是 int 或 unsigned long,跨平台用 pthread_equal 比较。
10. 收尾
线程的核心 API 不多,难的是配对纪律:
createlockcancelkey_create
任何一对配偏了,都是潜在的资源泄漏或死锁。
把这 14 个函数掌握,普通工程的多线程需求 90% 能搞定。剩下 10%(高性能调度、特殊信号处理、跨进程同步)才需要进一步学 attr 细节、信号、共享内存、futex 等。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
