图解 Linux I2C 框架,一篇讲透!
- 2026-07-02 01:35:24
大家好,我是蟹老板~
做嵌入式Linux驱动开发这些年来,我被问得最多的问题,不是怎么写I2C传感器驱动,也不是怎么调设备树,而是:Linux的I2C框架为什么要搞这么复杂?整出这么多结构体?
大伙得明白,Linux I2C 框架真正解决的不是“怎么发一个字节”这么小的问题,而是一个更大的问题。
不同 SoC 的 I2C 控制器不一样。
不同外设的寄存器协议不一样。
不同板子的设备树不一样。
用户态还想临时扫一下总线。
内核态驱动还想优雅地 probe/remove。
这些东西如果全揉在一起,驱动就会变成一坨又一坨平台相关代码。
能跑,但难维护。能交差,但后面的人会骂你。说不定半年后,自己也会骂自己。
这篇文章就我们将重点放在 Linux I2C 框架的分层设计上,看清楚每一层到底负责什么,它们之间怎么串起来,一次 I2C 读写请求又是怎么从外设驱动一路走到硬件控制器的。
一、为什么 Linux 需要 I2C 框架
1.1 I2C 总线协议的基本特点
I2C 的硬件形态很简单,两根线。
一根 SCL,负责时钟。
一根 SDA,负责数据。
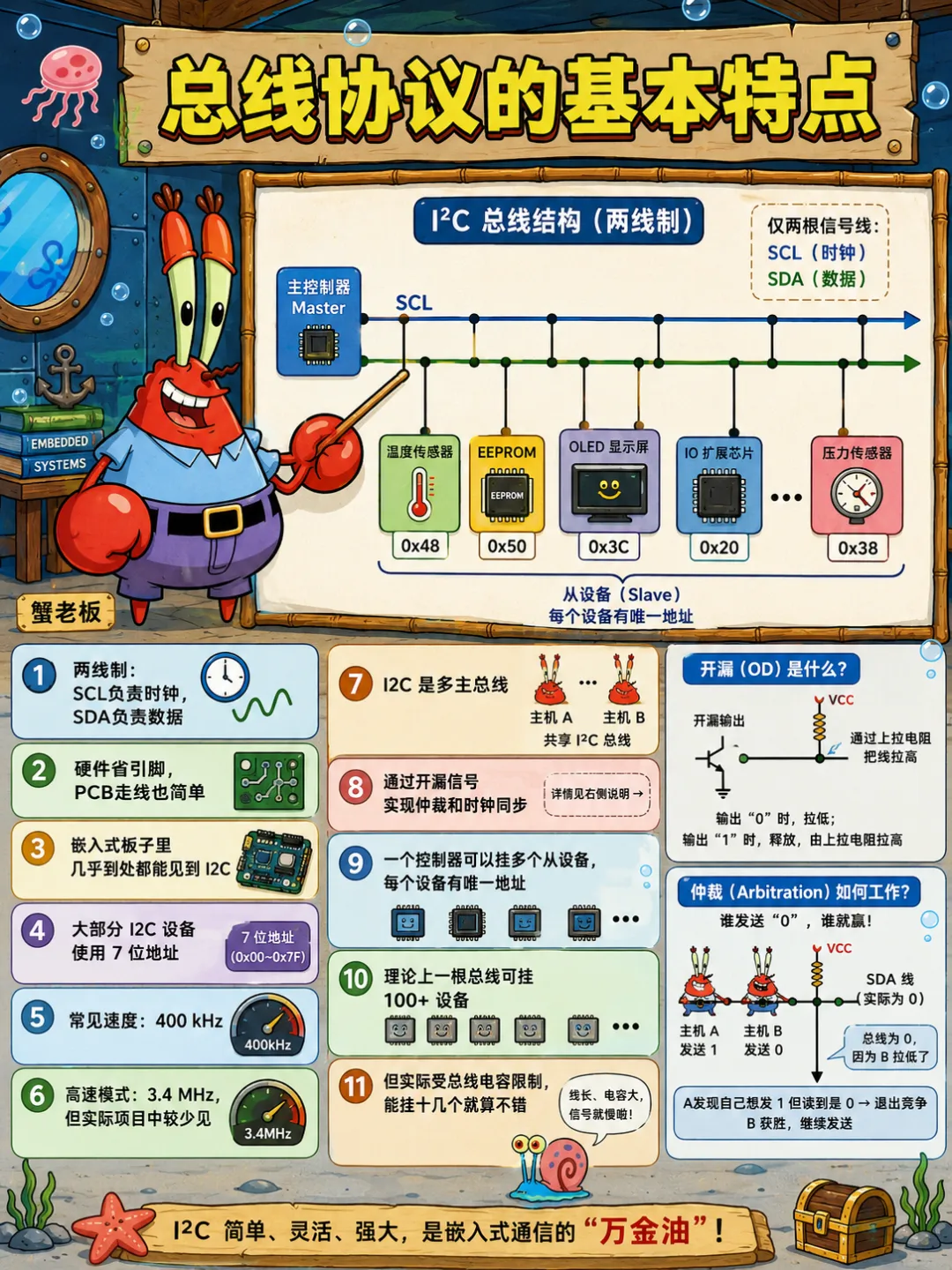
通常情况下,一个控制器作为主设备,多个外设挂在同一条总线上。每个外设有自己的地址,主设备通过地址找到对应的设备,再进行读写。
这也是 I2C 被大量用在板级低速外设上的原因。线少,成本低,挂设备方便。
比如一块嵌入式板子上,可能是这样的:
SoC I2C Controller | |--- Touch IC addr = 0x38 |--- RTC addr = 0x51 |--- EEPROM addr = 0x50 |--- Temperature IC addr = 0x48从协议角度看,一次常见的 I2C 写寄存器大概是这样:
START Device Address + Write Register Address DataSTOP一次常见的读寄存器可能是这样:
START Device Address + Write Register AddressRESTART Device Address + Read DataSTOP看起来是不是很清爽?
问题也恰好出在这里。I2C 协议本身很清爽,但 Linux 要面对的不是一个固定芯片,而是一整个生态。
一个传感器可以挂在 NXP 平台上,也可以挂在 Rockchip 平台上,还可以挂在全志、高通、STM32MP1 或者别的 SoC 上。外设驱动不应该关心底层控制器寄存器怎么写。否则同一个传感器驱动,每换一个平台就重写一遍,那真的绝了,驱动工程师会原地裂开。
所以 Linux 必须抽象。
它要把“控制器怎么发送数据”和“外设需要发送什么数据”拆开。
这个拆开,就是 Linux I2C 分层设计的起点。
1.2 裸机 I2C 驱动的常见痛点
裸机写 I2C,很多人都写过。最常见的方式有两种。
一种是直接操作 SoC I2C 控制器寄存器。
另一种是 GPIO 模拟 I2C,也就是常说的 bit-bang。
裸机项目小的时候,这么写没什么问题。比如一个单片机,只接一个 EEPROM。初始化 I2C,写几个函数完事:
i2c_start();i2c_write_byte(addr);i2c_write_byte(reg);i2c_read_byte();i2c_stop();但项目稍微复杂一点,问题就开始冒出来了。
同一个 I2C 控制器上挂了多个设备,谁来管理地址?
多个业务模块同时访问 I2C,谁来加锁?
一个设备读写失败,错误码怎么往上传?
控制器支持中断模式,也支持轮询模式,怎么抽象?
某个芯片要先开
regulator,再 release reset,再访问 I2C,这些时序放哪里?
设备断电后重新上电,驱动怎么恢复状态?
裸机里很多问题靠“约定”和“经验”解决。写的人知道,维护的人不一定知道。板子一多,供应商一换,痛苦就来了。
我以前调过一块板子,触摸屏和摄像头配置芯片挂在同一个 I2C 控制器上。触摸屏驱动里写了一套 I2C 访问函数,摄像头那边又写了一套,PMIC 那边还有一套。看上去每个模块都能跑,但只要系统启动顺序稍微变一下,某个设备就偶现 NACK。后来查了半天,才发现有个模块在访问失败后没有恢复控制器状态,后面的设备全被坑。
这类问题在裸机里很常见。不是因为大家水平差,而是因为缺一套统一的框架。

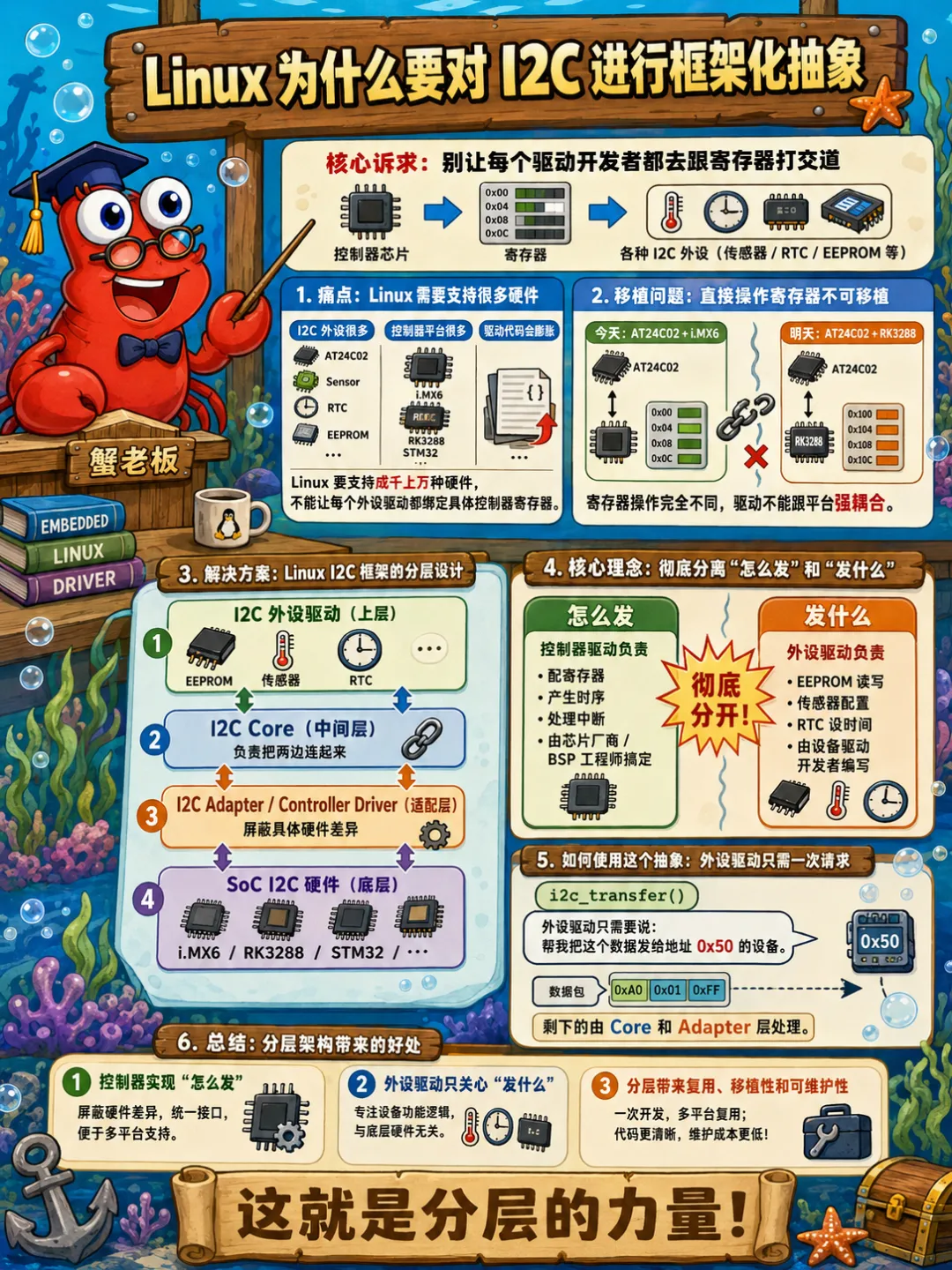
1.3 Linux 为什么要对 I2C 进行框架化抽象
既然裸机写法问题这么多,Linux内核设计师索性直接做了一套通用I2C框架。核心目的就一个:解耦。把硬件控制器、总线、外设、业务逻辑彻底拆开,各司其职。
控制器驱动解决底层发送问题。
外设驱动解决设备业务问题。
核心层负责把两者连接起来。
用户态如果想临时访问,也提供统一入口。
于是 Linux I2C 框架里就有了几个非常关键的对象。
i2c_adapter 表示一条 I2C 总线,或者说一个控制器抽象。
i2c_algorithm 表示这个控制器具体怎么传输。
i2c_client 表示挂在某条 I2C 总线上的一个外设。
i2c_driver 表示能驱动某类 I2C 外设的驱动。
I2C Core 则负责设备注册、驱动匹配、传输转发、总线管理这些通用事情。
看起来概念很多,但它们的分工其实很朴素。
你可以先记住一句话:
adapter 负责总线client 负责设备driver 负责驱动algorithm 负责传输方法core 负责把它们串起来这句话理解了,Linux I2C 框架就已经入门一半了。
二、Linux I2C 框架整体分层模型
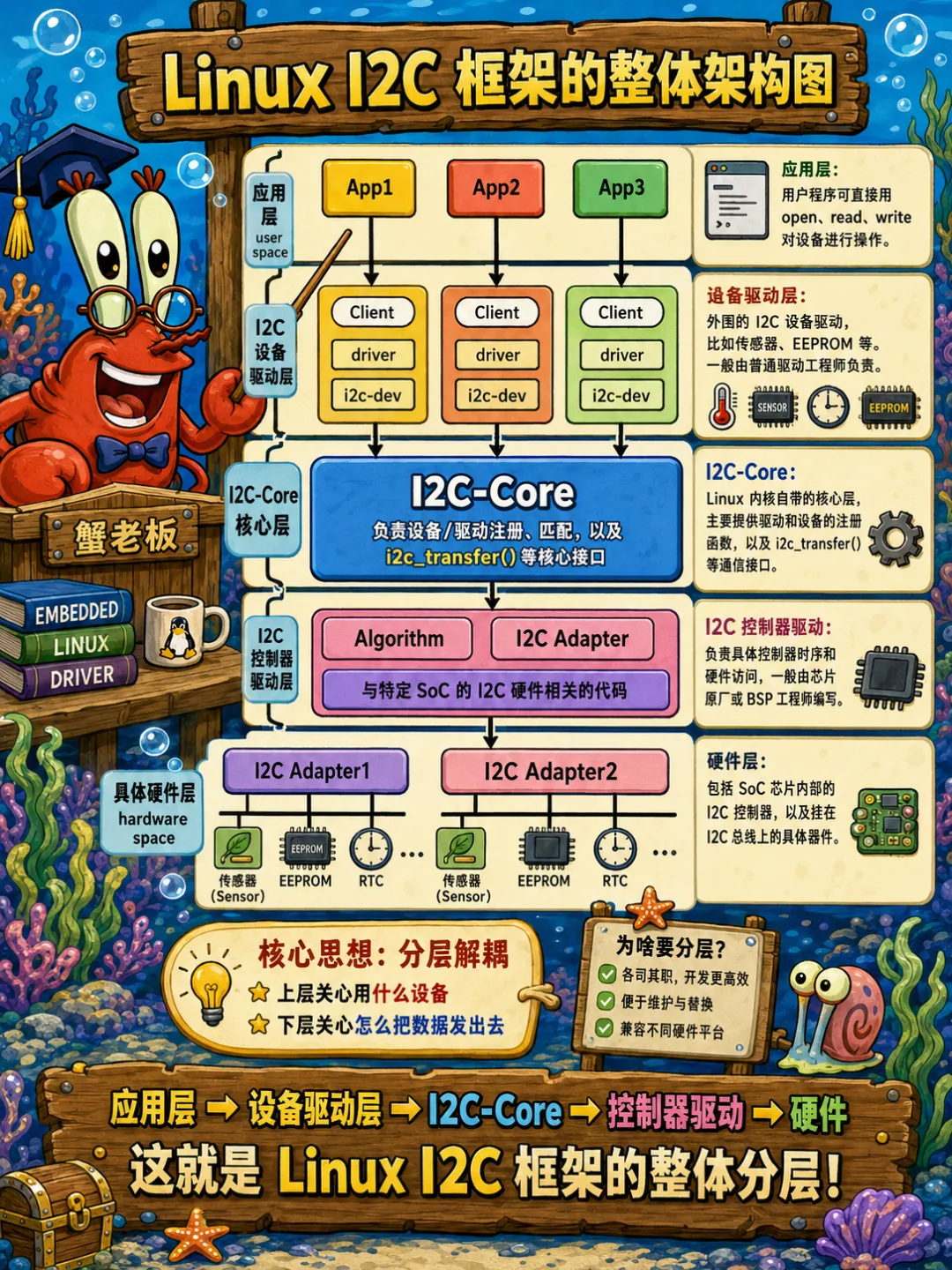
2.1 Linux I2C 框架的整体架构图
先给一张文字版架构图。
用户空间 | | open("/dev/i2c-x") | ioctl(I2C_SLAVE / I2C_RDWR) vi2c-dev 用户态访问层 | vI2C Core 核心层 | |---- i2c_client |---- i2c_driver |---- i2c_adapter |---- i2c_msg | vAdapter 层 | |---- i2c_adapter |---- i2c_algorithm |---- master_xfer() | vSoC I2C 控制器驱动层 | |---- 寄存器 |---- 中断 |---- 时钟 |---- pinctrl | vI2C 硬件总线 | |---- EEPROM |---- RTC |---- Sensor |---- Touch IC如果从外设驱动角度看,路径会稍微不一样。
I2C 外设驱动 | | i2c_transfer() | i2c_smbus_read_byte_data() vI2C Core | vi2c_adapter | vadapter->algo->master_xfer() | vSoC I2C 控制器驱动 | vSCL / SDA 波形一个重点来了。
Linux I2C 里不是所有访问都从用户态开始。大多数正规设备,比如触摸屏、RTC、传感器,都是内核态驱动访问 I2C。用户态的 /dev/i2c-x 更多用于调试、测试、板级验证,或者少量简单应用场景。
2.2 从硬件控制器到用户空间的分层路径
我们从底往上看。
最底层是硬件 I2C 控制器。它在 SoC 内部,有自己的寄存器。比如控制寄存器、状态寄存器、数据寄存器、中断状态寄存器、时钟分频寄存器。
再上一层是控制器驱动。它知道这些寄存器怎么配置,知道怎么产生 START,怎么发送地址,怎么处理 ACK/NACK,怎么等待传输完成。
再上一层是 adapter 抽象。Linux 不希望上层关心这个控制器是 Rockchip 的、NXP 的还是 STM32 的。所以它把每个控制器抽象成一个 i2c_adapter。
然后是 I2C Core。它把 adapter、client、driver、message、SMBus 接口都管理起来。
再上面是外设驱动。外设驱动不直接碰控制器寄存器,只通过 I2C Core 提供的 API 发请求。
还有一条分支是用户态访问。i2c-dev 会给每个 adapter 暴露一个 /dev/i2c-x 字符设备。用户程序通过 ioctl 设置目标地址,再发起读写。
这套分层的好处是,外设驱动基本可以跨平台。
一个 EEPROM 驱动,不需要知道底层 I2C 控制器是哪个厂家的。只要这个平台的 I2C adapter 正常注册,传输接口正常实现,EEPROM 驱动就能工作。
这就是框架化的意义。

2.3 各层之间的职责边界
我们可以这样分:
SoC 控制器驱动 关心:寄存器、中断、时钟、DMA、FIFO、传输状态Adapter 层 关心:把控制器能力抽象成 Linux I2C 总线I2C Core 关心:设备模型、驱动匹配、传输封装、锁、统一 API外设驱动 关心:芯片手册、寄存器表、初始化序列、业务数据用户态访问层 关心:临时访问、调试工具、简单用户程序边界清楚了,很多问题就好定位。
比如你驱动 probe 不进,大概率先看设备树和匹配机制。
如果 probe 进了,但 i2c_transfer() 失败,就看 adapter、控制器、中断、pinctrl、时钟、电源。
如果 i2cdetect 能扫到,但内核驱动不工作,就看外设驱动初始化流程。
要不然你就会陷入一种很痛苦的状态:哪里都怀疑,哪里都改一点,最后板子更玄学了。
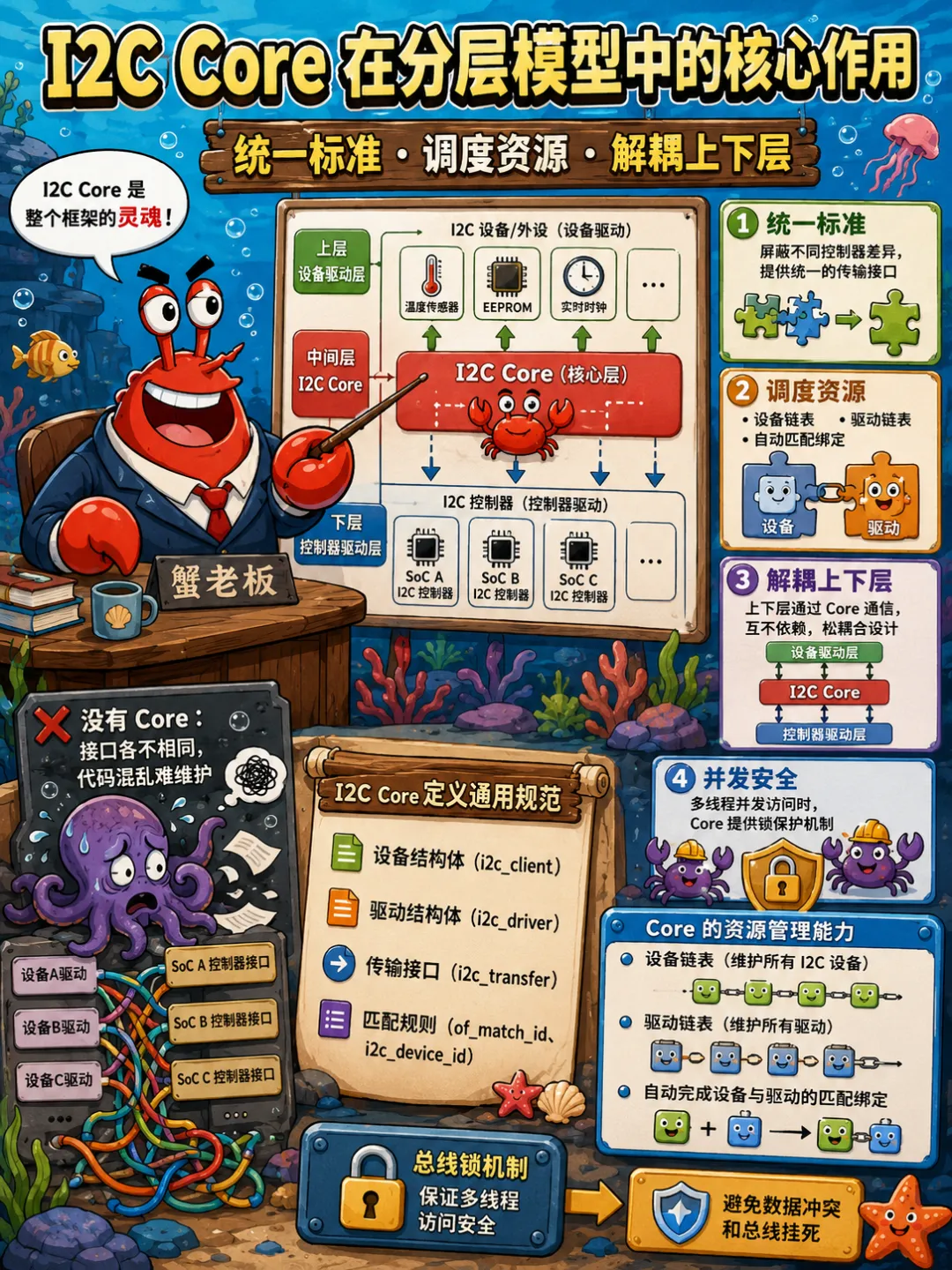
2.4 I2C Core 在分层模型中的核心作用
I2C Core 是这套框架的中枢。它不直接产生 SCL/SDA 波形,但没有它,上下层就散了。
I2C Core 做的事情包括:
管理
i2c_adapter的注册和注销。
管理
i2c_client的创建和删除。
管理
i2c_driver的注册和匹配。
提供
i2c_transfer()这类统一传输接口。
封装
SMBus访问接口。
处理部分锁和错误返回。
把设备模型和 Linux driver model 接起来。
你可以把 I2C Core 想成一个调度员。
控制器驱动说:“我这里有一条 I2C 总线,能发数据。”
外设设备说:“我挂在这条总线上,地址是 0x50,compatible 是 xxx。”
外设驱动说:“我能驱动 compatible 为 xxx 的设备。”
I2C Core 在中间说:“行,你们匹配上了,我调用 probe。后面外设驱动要传输,就从 adapter 的 master_xfer 走。”
它不抢活,但它管流程。
三、控制器驱动层,SoC I2C 控制器如何接入内核
3.1 I2C 控制器驱动负责什么
I2C控制器驱动,也叫适配器驱动,它的活就是把具体的I2C硬件控制器包装成内核的i2c_adapter。控制器驱动是最贴近硬件的一层。
具体来说要做这几件事:
• 初始化I2C控制器的时钟 • 配置I2C控制器的引脚(复用功能) • 设置I2C总线速率(标准模式100k、快速模式400k等) • 实现中断处理函数 • 实现 i2c_algorithm里的master_xfer()回调• 调用 i2c_add_adapter()把自己注册到系统里
控制器驱动不关心上层要读什么数据、写什么数据。它只关心一件事:上层给我一个i2c_msg数组,我负责把这些消息转化成硬件时序发出去。

3.2 SoC I2C 控制器与平台驱动模型
Linux内核中,所有片上外设控制器,包括I2C、SPI、UART、GPIO,全部基于平台驱动模型实现。也就是platform_driver,这是内核适配片上硬件的标准模型。
为什么要用平台驱动?
因为SoC的控制器是片上固定资源,没有热插拔需求,平台驱动刚好适配这种静态硬件资源。而且平台驱动完美支持设备树匹配,能通过设备树参数灵活配置时钟、速率、引脚、中断号,不用硬编码,适配性极强。
我随便贴一段标准的I2C控制器平台驱动框架代码,大家就能直观感受到结构有多固定。
static conststruct of_device_id xxx_i2c_of_match[] = { { .compatible = "xxx,xxx-i2c" }, { /* Sentinel */ }};staticstruct platform_driver xxx_i2c_driver = { .probe = xxx_i2c_probe, .remove = xxx_i2c_remove, .driver = { .name = "xxx-i2c", .of_match_table = xxx_i2c_of_match, },};module_platform_driver(xxx_i2c_driver);这段代码是所有I2C控制器驱动的标配。设备树里的compatible属性和of_device_id匹配之后,内核就会调用probe函数,执行控制器初始化、总线注册等全套逻辑。
那为什么设备树compatible必须和驱动一致?
这就是平台驱动的匹配规则,一字不差才能触发probe,这也是很多设备注册失败的核心原因之一。

3.3 控制器驱动中的寄存器、中断与时钟处理
控制器probe函数里,核心工作就是三件事:拿资源、配硬件、注册总线。最核心的工作是把一个抽象传输请求变成硬件动作。
上层传下来的是 i2c_msg。
底层要做的是:
设置目标地址。
配置读写方向。
写 TX FIFO。
启动传输。
等待中断。
读取 RX FIFO。
判断 ACK/NACK。
处理 STOP。
返回传输结果。
比如一个控制器的发送流程可能是这样:
写目标地址寄存器写数据长度寄存器把数据写入 TX FIFO设置 START使能传输等待中断完成检查错误状态清中断返回结果这里面最容易出问题的是时钟、中断和状态位。
时钟没开,寄存器读写可能全是 0,或者写了没反应。
pinctrl 没配,SCL/SDA 可能还在 GPIO 模式,或者被 UART/SPI 占着。
中断没来,传输就卡在等待完成。
状态位没清干净,下一次传输直接异常。
还有一个很常见的问题,总线忙。
有时候设备上一次传输异常,SDA 被外设拉低,控制器看到 bus busy,一直不发起新的传输。这时候软件再怎么重试都不一定有用,得恢复总线,比如切 GPIO 拉 SCL,或者 reset 控制器,甚至重新上电外设。
别笑,这种问题现场很常见。尤其是客户拿一根飞线接了个传感器,还问你为什么偶现死机。你去现场一看,线长得像天线,I2C 波形边沿跟山路一样。

3.4 控制器驱动如何向内核注册 I2C 总线能力
控制器驱动完成硬件初始化后,需要向 I2C Core 注册一个 i2c_adapter。
核心是填充 adapter,并提供 algorithm:
static conststruct i2c_algorithm xxx_i2c_algo = { .master_xfer = xxx_i2c_xfer, .functionality = xxx_i2c_func,};static int xxx_i2c_register_adapter(struct platform_device *pdev, struct xxx_i2c_dev *i2c){struct i2c_adapter *adap = &i2c->adap; adap->owner = THIS_MODULE; adap->algo = &xxx_i2c_algo; adap->dev.parent = &pdev->dev; adap->nr = pdev->id; strscpy(adap->name, "xxx-i2c-adapter", sizeof(adap->name)); i2c_set_adapdata(adap, i2c); return i2c_add_adapter(adap);}这里最关键的是:
adap->algo = &xxx_i2c_algo;因为上层最终会通过 adapter 找到 algorithm,再调用 master_xfer()。
这就是 I2C 框架里非常经典的一条线:
i2c_transfer() -> __i2c_transfer() -> adap->algo->master_xfer() -> 控制器驱动自己的传输函数上层不关心你底层是 FIFO、中断、DMA 还是轮询。
你只要实现好 master_xfer(),就等于告诉 I2C Core:这条总线我能发。

四、Adapter 层,i2c_adapter 与 i2c_algorithm
4.1 i2c_adapter 是一条 I2C 总线在内核中的抽象
i2c_adapter 是理解 Linux I2C 框架非常重要的结构。
它表示一条 I2C 总线,或者更准确地说,表示一个能发起 I2C 传输的控制器通道。
如果 SoC 有 5 个 I2C 控制器,正常情况下就可能注册出 5 个 adapter。
用户空间看到的 /dev/i2c-0、/dev/i2c-1,本质上也和这些 adapter 有关系。
一个 adapter 背后可能对应一个真实硬件控制器,也可能是一个模拟 I2C 控制器,比如 GPIO bit-bang。上层不用管。只要它是 adapter,就可以按 I2C 总线来使用。
这就是抽象带来的爽感。
对外设驱动来说,它只需要知道自己的 client->adapter 是哪条总线。至于这条总线底下怎么发,那是 adapter 和 algorithm 的事。

4.2 i2c_algorithm 是控制器传输能力的抽象
i2c_algorithm 描述一个 adapter 能干什么,以及怎么干。
典型成员包括:
struct i2c_algorithm { int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*smbus_xfer)(struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); u32 (*functionality)(struct i2c_adapter *adap);};不同内核版本细节可能会有变化,但核心思想一直在。
master_xfer()负责标准 I2C 传输。
smbus_xfer()负责SMBus风格传输,有些控制器可以硬件支持,有些可以通过 I2C 模拟。
functionality()用来告诉上层这个adapter支持哪些能力,比如是否支持 I2C、是否支持 SMBus byte data、word data 等。
外设驱动调用某些 SMBus API 时,I2C Core 可能会检查 adapter 的能力。如果底层不支持,对应操作就可能失败。
所以你看到一些驱动里会有类似这样的检查:
if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) return -EOPNOTSUPP;这个检查是在确认底层 adapter 是否真的支持你要用的传输方式。

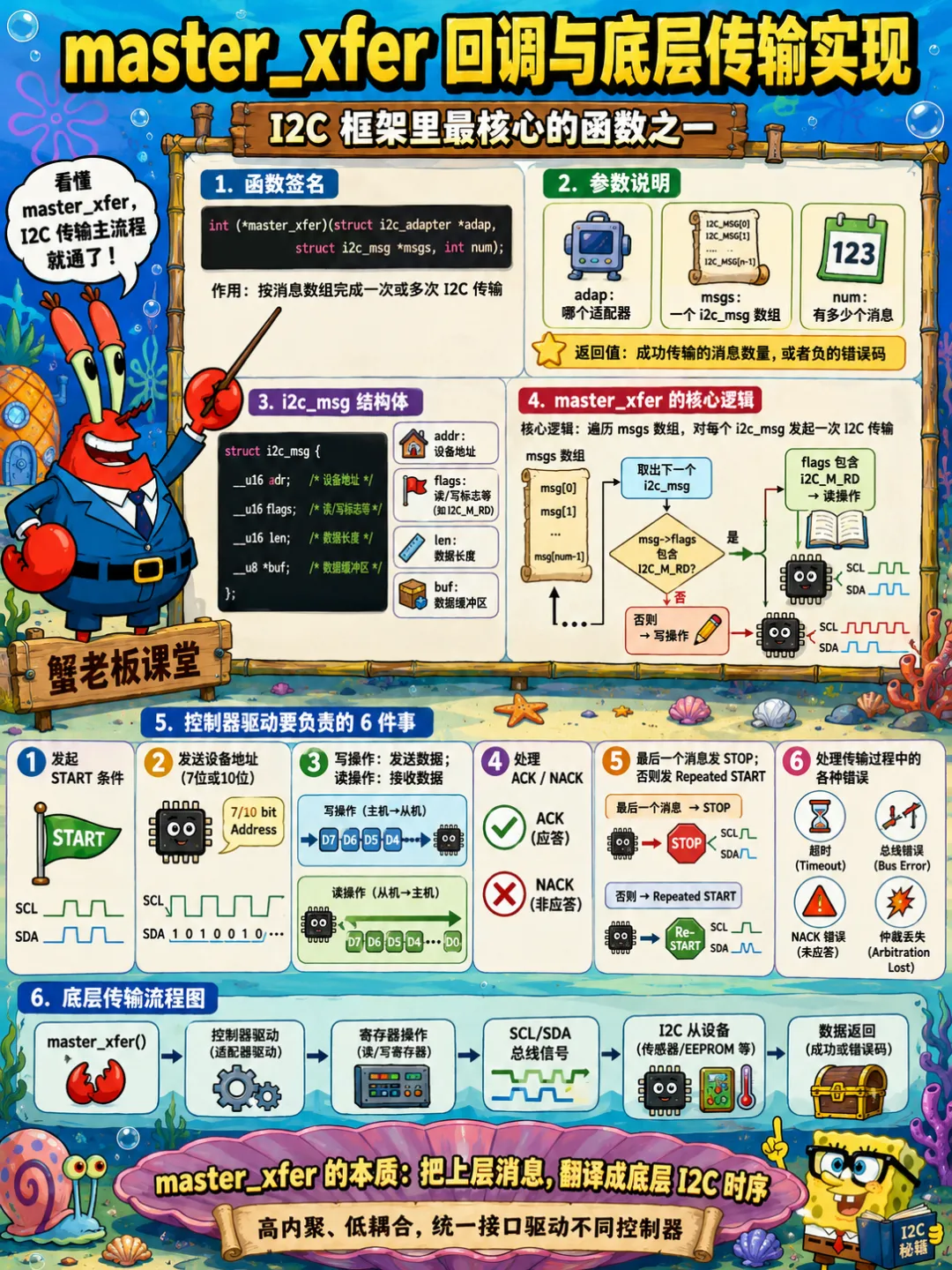
4.3 master_xfer 回调与底层传输实现
master_xfer() 是控制器驱动的核心战场。
它接收一组 i2c_msg,然后完成传输。
为什么是一组?
因为很多 I2C 操作不是单独一个读或者写,而是组合传输。比如先写寄存器地址,再读数据,中间不能释放总线,只能用 repeated start。
对应的 i2c_msg 可能是两个:
struct i2c_msg msgs[2];msgs[0].addr = client->addr;msgs[0].flags = 0;msgs[0].len = 1;msgs[0].buf = ®msgs[1].addr = client->addr;msgs[1].flags = I2C_M_RD;msgs[1].len = len;msgs[1].buf = data;ret = i2c_transfer(client->adapter, msgs, 2);这里 msgs[0] 是写寄存器地址。
msgs[1] 是读数据。
i2c_transfer() 会把这两个 message 作为一组交给底层 adapter。底层控制器驱动要保证它们之间的总线时序符合要求。
实际波形通常类似这样:
START + addr(W) + reg + RESTART + addr(R) + data + STOP如果控制器驱动没有正确处理 repeated start,一些外设就会读失败。
这个问题我真遇到过。某个触摸芯片在一个平台上好好的,换到另一个平台就读不到坐标。驱动完全一样,设备树地址也没错。最后拿逻辑分析仪一看,两个平台的 repeated start 时序不一样。那一刻你会发现,软件层看起来一样,底层控制器实现差一点,结果完全不同。
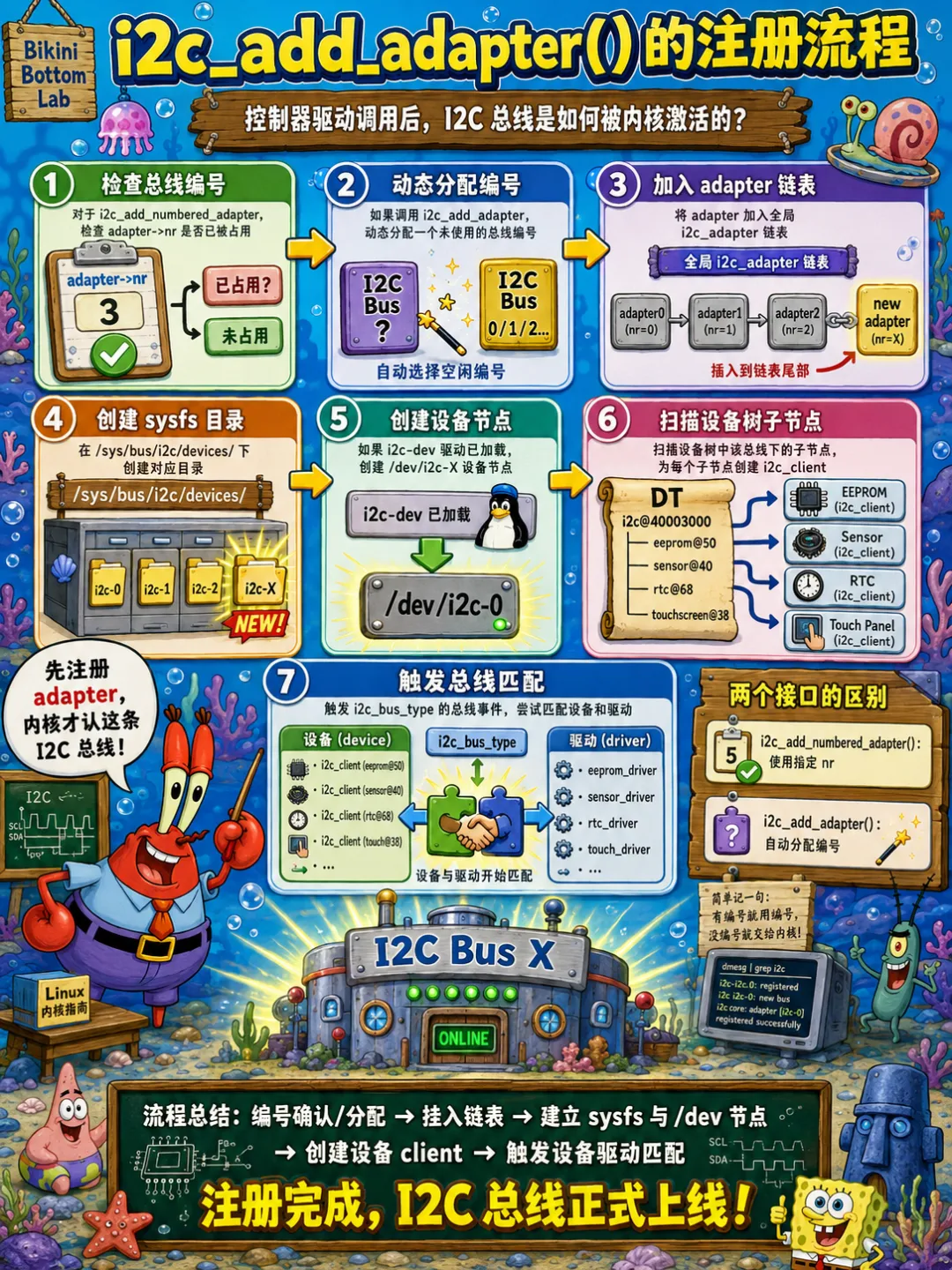
4.4 i2c_add_adapter() 的注册流程
控制器驱动调用 i2c_add_adapter() 之后,I2C Core 会把这个 adapter 加入系统。
大致会做几件事:
给
adapter分配编号。
把
adapter注册到设备模型。
创建相关
sysfs节点。
通知
I2C Core这条总线可用了。
如果启用了 i2c-dev,后面还会有对应的用户态访问节点。
注册成功后,你通常能在系统里看到类似信息:
ls /sys/class/i2c-adapter/i2c-0 i2c-1 i2c-2或者:
ls /dev/i2c-*/dev/i2c-0 /dev/i2c-1当然,/dev/i2c-x 还依赖 i2c-dev 驱动是否启用。
这里有个新手容易误解的点。
看到 /dev/i2c-1,只能说明 adapter 注册了,不代表某个外设一定存在,也不代表设备驱动一定 probe 成功。
它只说明这条 I2C 总线入口在。
设备在不在,还得扫地址或者看设备树和驱动匹配。
4.5 多个 I2C Adapter 与硬件总线编号的关系
嵌入式板子上经常有多个 I2C 控制器,比如 I2C0、I2C1、I2C2。
Linux 里的 adapter 编号不一定永远等于硬件手册里的编号。很多平台会通过设备树 alias 固定编号:
aliases { i2c0 = &i2c0; i2c1 = &i2c1; i2c2 = &i2c2;};如果没有 alias,编号可能取决于注册顺序。
这就会带来一个很现实的问题。
你以为传感器在 /dev/i2c-1,实际它在 /dev/i2c-3。
然后你拿 i2cdetect -y 1 扫半天,啥也没有。你开始怀疑硬件,怀疑焊接,怀疑人生。结果最后发现扫错总线。
所以调 I2C 的时候,我一般会先看:
ls /sys/class/i2c-adapter/cat /sys/class/i2c-adapter/i2c-1/name确认这条总线到底对应哪个控制器。别一上来就扫,扫错了也白扫。

五、Core 层,I2C Core 如何统一管理设备、驱动和传输
5.1 I2C Core 的核心职责
I2C Core 是 Linux I2C 框架里最像“中间层”的部分。
它不写外设寄存器。
它也不直接控制 SCL/SDA。
它主要负责把 Linux 设备模型和 I2C 总线模型结合起来。
它要处理的问题包括: adapter 注册进来后怎么管理。
设备树里的 I2C 子节点怎么变成 i2c_client。
外设驱动注册进来后怎么匹配设备。
外设驱动调用传输 API 时怎么转发到底层控制器。
用户态通过 i2c-dev 访问时怎么复用同一套传输路径。
还有锁、错误码、SMBus 封装等通用机制。
你可以把 I2C Core 理解成“胶水层”,但别小看胶水层。一个系统真正稳不稳,很多时候就看胶水层写得是不是规矩。

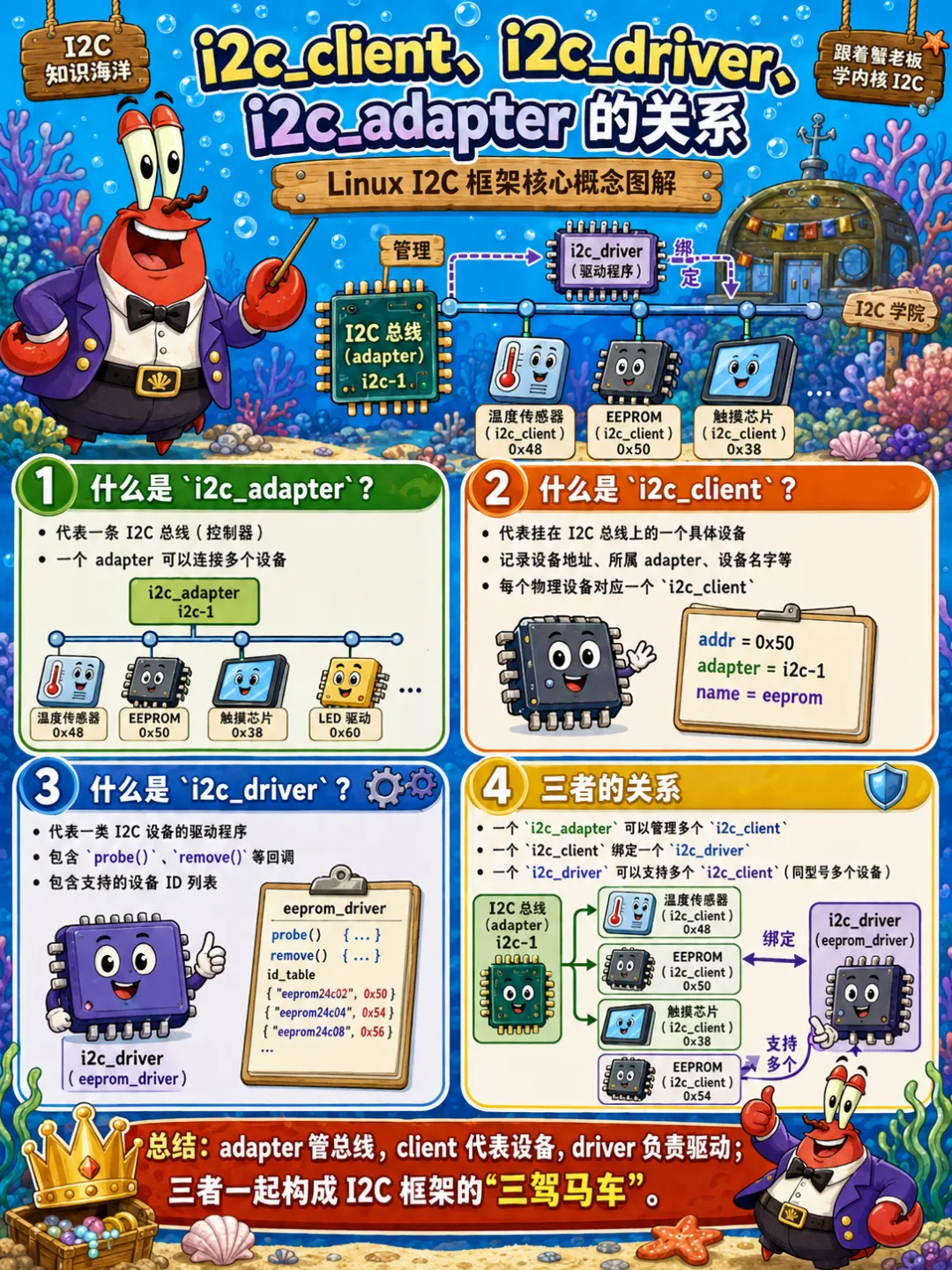
5.2 i2c_client、i2c_driver、i2c_adapter 的关系
这三个结构是 I2C 框架的骨架。
i2c_adapter表示总线。
i2c_client表示设备。
i2c_driver表示驱动。
它们之间的关系可以画成这样:
i2c_adapter | |--- i2c_client addr=0x38 compatible="xxx,touch" | | | +--- matched with i2c_driver | |--- i2c_client addr=0x50 compatible="xxx,eeprom" | +--- matched with another i2c_driver一个 adapter 上可以挂多个 client。
一个 i2c_driver 可以匹配多个 client,只要设备 ID 或 compatible 对得上。
一个 client 最终绑定一个 driver。
这里有点像 platform 总线的设备和驱动匹配,只不过 I2C 设备还多了一个地址属性。因为同一条总线上,地址是非常关键的。
比如设备树里这样写:
eeprom@50 { compatible = "atmel,24c02"; reg = <0x50>;};这里的 reg = <0x50> 表示 I2C 设备地址。
内核解析这个节点后,会创建一个 i2c_client,它的 addr 就是 0x50。
5.3 I2C 总线类型 i2c_bus_type 的作用
Linux 设备模型里有 bus、device、driver。
I2C 也有自己的 bus type,也就是 i2c_bus_type。
这个 bus type 负责 I2C 设备和 I2C 驱动之间的匹配逻辑。
你注册一个 i2c_driver,本质上是把一个 driver 注册到 I2C bus。
你创建一个 i2c_client,本质上是把一个 device 挂到 I2C bus。
然后设备模型会尝试匹配。
匹配成功后,调用 driver 的 probe。
所以 i2c_driver 里的 probe 并不是你手动调用的,而是匹配机制自动触发的。
典型外设驱动结构如下:
static int xxx_probe(struct i2c_client *client){struct xxx_data *data; data = devm_kzalloc(&client->dev, sizeof(*data), GFP_KERNEL); if (!data) return -ENOMEM; i2c_set_clientdata(client, data); /* 读取芯片 ID,初始化寄存器 */ return 0;}static void xxx_remove(struct i2c_client *client){ /* 释放资源,关闭设备 */}static conststruct of_device_id xxx_of_match[] = { { .compatible = "vendor,xxx-sensor" }, { }};MODULE_DEVICE_TABLE(of, xxx_of_match);static conststruct i2c_device_id xxx_id[] = { { "xxx-sensor", 0 }, { }};MODULE_DEVICE_TABLE(i2c, xxx_id);staticstruct i2c_driver xxx_driver = { .driver = { .name = "xxx-sensor", .of_match_table = xxx_of_match, }, .probe = xxx_probe, .remove = xxx_remove, .id_table = xxx_id,};module_i2c_driver(xxx_driver);不同内核版本里 probe 函数原型可能有过调整,但整体思路不变。

5.4 I2C 设备与驱动的匹配机制
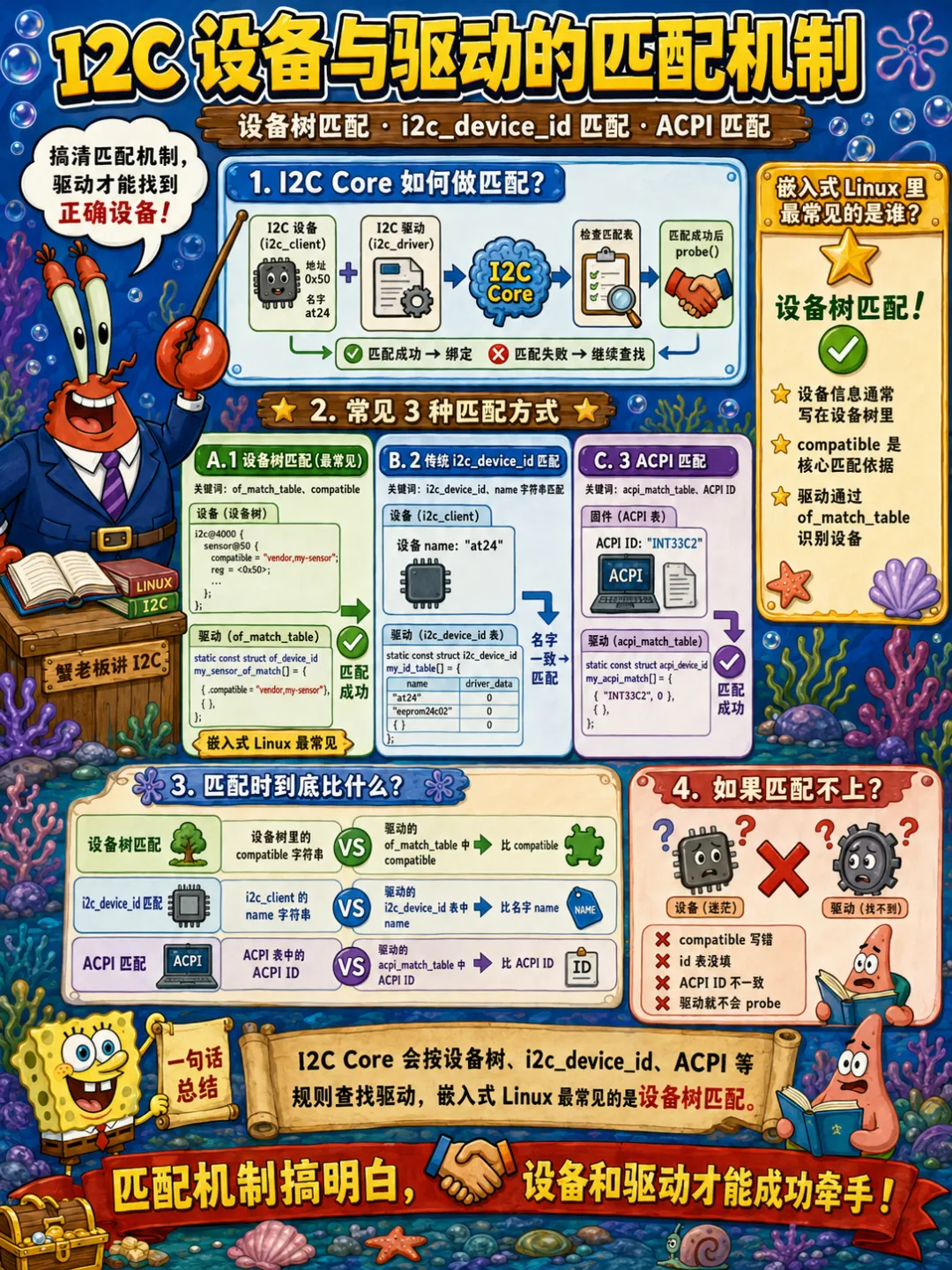
I2C 设备和驱动匹配常见有几种方式。 设备树匹配。 传统 i2c_device_id 匹配。 ACPI 匹配。
嵌入式 Linux 里最常见的是设备树匹配。
设备树节点:
sensor@48 { compatible = "vendor,xxx-sensor"; reg = <0x48>;};驱动里:
static conststruct of_device_id xxx_of_match[] = { { .compatible = "vendor,xxx-sensor" }, { }};只要 compatible 一致,I2C Core 和设备模型就有机会把它们匹配起来。
但匹配成功是有前提的:
I2C 控制器节点要 enabled。
adapter要注册成功。
子设备节点要在控制器节点下面。
地址要合法。
驱动模块要加载。
compatible要写对。
这些条件少一个,probe 都可能不进。
所以“设备树写了,probe 不进”这种问题,不要只盯着外设驱动。你要顺着链路查。
控制器节点 status 是不是 okay?
pinctrl有没有报错?
adapter有没有注册?
client有没有创建?
driver 有没有加载?
compatible有没有拼错?
这个排查顺序,比乱改代码靠谱多了。
5.5 i2c_transfer() 与 i2c_smbus_xfer() 的封装意义
Core层给上层驱动提供了两套通用读写接口,覆盖所有I2C设备场景。
一类是标准 I2C transfer。
一类是 SMBus 风格 API。
标准 I2C transfer 更灵活:
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);你自己组织 i2c_msg,适合复杂读写。
SMBus API 更像寄存器访问封装:
i2c_smbus_read_byte_data(client, reg);i2c_smbus_write_byte_data(client, reg, value);i2c_smbus_read_word_data(client, reg);这类接口写起来舒服,适合很多简单外设。
但别误会。不是所有设备都适合 SMBus API。
有些设备要求特殊时序,比如多字节寄存器地址、连续 burst 读写、特殊 repeated start。这种时候用 i2c_transfer() 更稳。
我个人的习惯是: 简单 8-bit 寄存器设备,用 SMBus API。 寄存器地址是 16-bit,或者读写时序比较特殊,就直接组 i2c_msg。
别为了代码短,牺牲时序可控性。后面调起来会哭。

六、Client / Driver 层,I2C 外设驱动如何工作
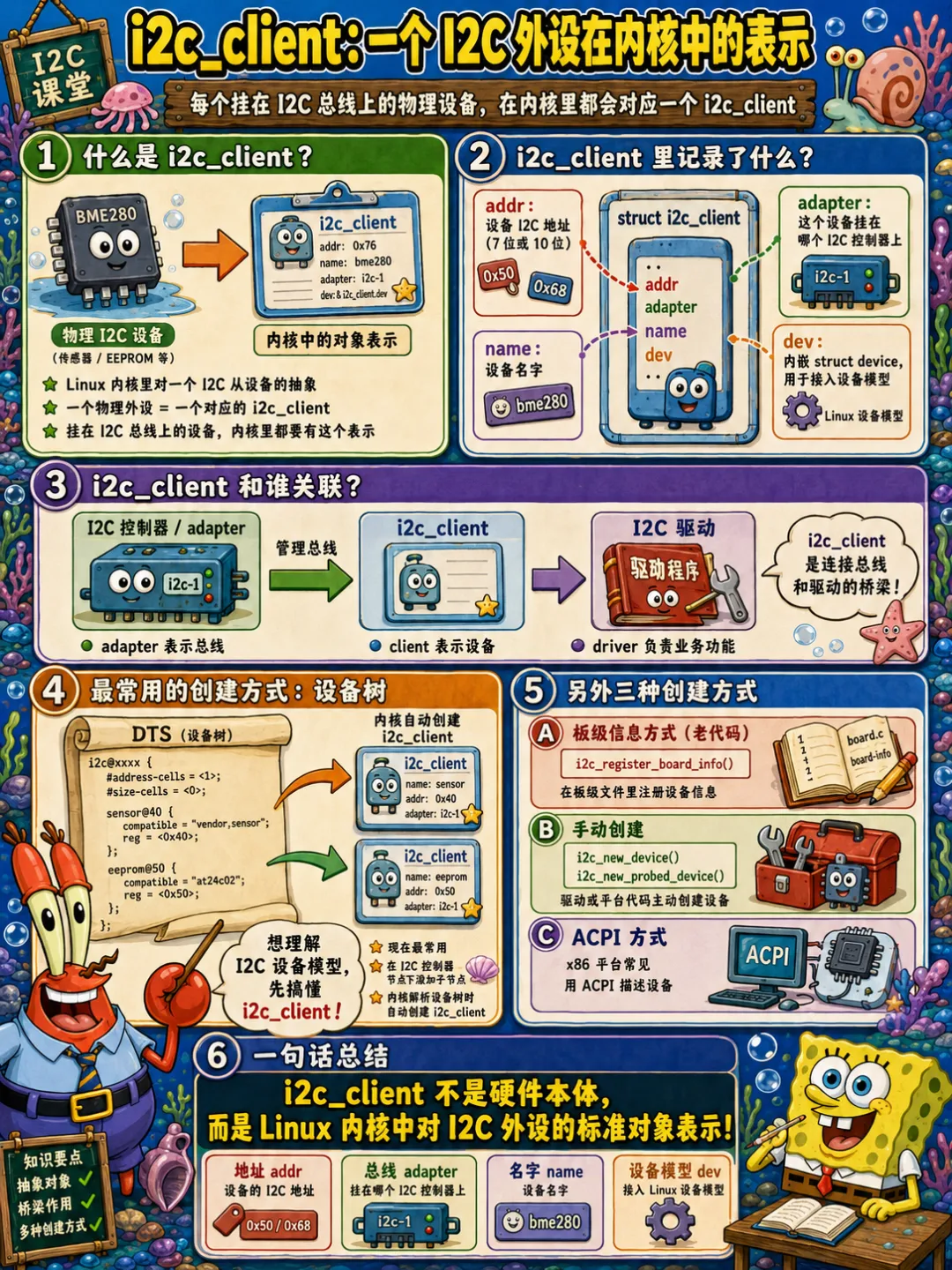
6.1 i2c_client 是一个 I2C 外设在内核中的表示
i2c_client 表示一个挂在 I2C adapter 上的外设。
它里面最关键的信息包括:
设备地址。
所属
adapter。
设备对象
dev。
设备名。
一些标志位。
外设驱动的 probe 拿到的就是 i2c_client。
static int xxx_probe(struct i2c_client *client){ dev_info(&client->dev, "addr = 0x%x\n", client->addr); dev_info(&client->dev, "adapter = %s\n", client->adapter->name); return 0;}通过 client,驱动可以知道自己在哪条总线上,目标地址是多少,也可以通过 client->dev 使用 devm 资源管理、打印日志、获取设备树属性。
比如读取一个 GPIO:
data->reset_gpio = devm_gpiod_get_optional(&client->dev, "reset", GPIOD_OUT_HIGH);读取 regulator:
data->vdd = devm_regulator_get(&client->dev, "vdd");读取设备树属性:
device_property_read_u32(&client->dev, "vendor,poll-interval", &interval);所以 I2C 外设驱动不是只干 I2C 读写。一个完整外设驱动还要处理电源、复位、中断、输入子系统、字符设备、IIO、hwmon 等框架。I2C 只是它和芯片通信的通道。
6.2 i2c_driver 是 I2C 外设驱动的核心结构
i2c_driver 描述一个 I2C 外设驱动。
它通常包括:
driver name。
of_match_table。
id_table。
probe。
remove。
可能还有 power management 回调。
一个稍微完整一点的外设驱动结构如下:
struct xxx_data {struct i2c_client *client;struct regulator *vdd;struct gpio_desc *reset_gpio; int irq;};static int xxx_read_reg(struct xxx_data *data, u8 reg){ return i2c_smbus_read_byte_data(data->client, reg);}static int xxx_write_reg(struct xxx_data *data, u8 reg, u8 val){ return i2c_smbus_write_byte_data(data->client, reg, val);}static int xxx_probe(struct i2c_client *client){struct xxx_data *data; int chip_id; int ret; data = devm_kzalloc(&client->dev, sizeof(*data), GFP_KERNEL); if (!data) return -ENOMEM; data->client = client; i2c_set_clientdata(client, data); data->vdd = devm_regulator_get(&client->dev, "vdd"); if (IS_ERR(data->vdd)) return PTR_ERR(data->vdd); ret = regulator_enable(data->vdd); if (ret) return ret; chip_id = xxx_read_reg(data, 0x00); if (chip_id < 0) { ret = chip_id; goto err_power; } dev_info(&client->dev, "chip id = 0x%x\n", chip_id); ret = xxx_write_reg(data, 0x10, 0x01); if (ret) goto err_power; return 0;err_power: regulator_disable(data->vdd); return ret;}这个例子很普通,但已经能看出外设驱动的基本套路: 拿资源→上电→读 ID→初始化寄存器→注册到对应子系统→失败路径清理。
很多驱动出问题,不是 I2C API 不会用,而是失败路径写得太随便。probe 中间失败,电源没关,reset 状态不对,中断已经申请但资源没处理干净。下一次再加载,系统状态就乱了。
这类 bug 不一定每次出现,最烦。
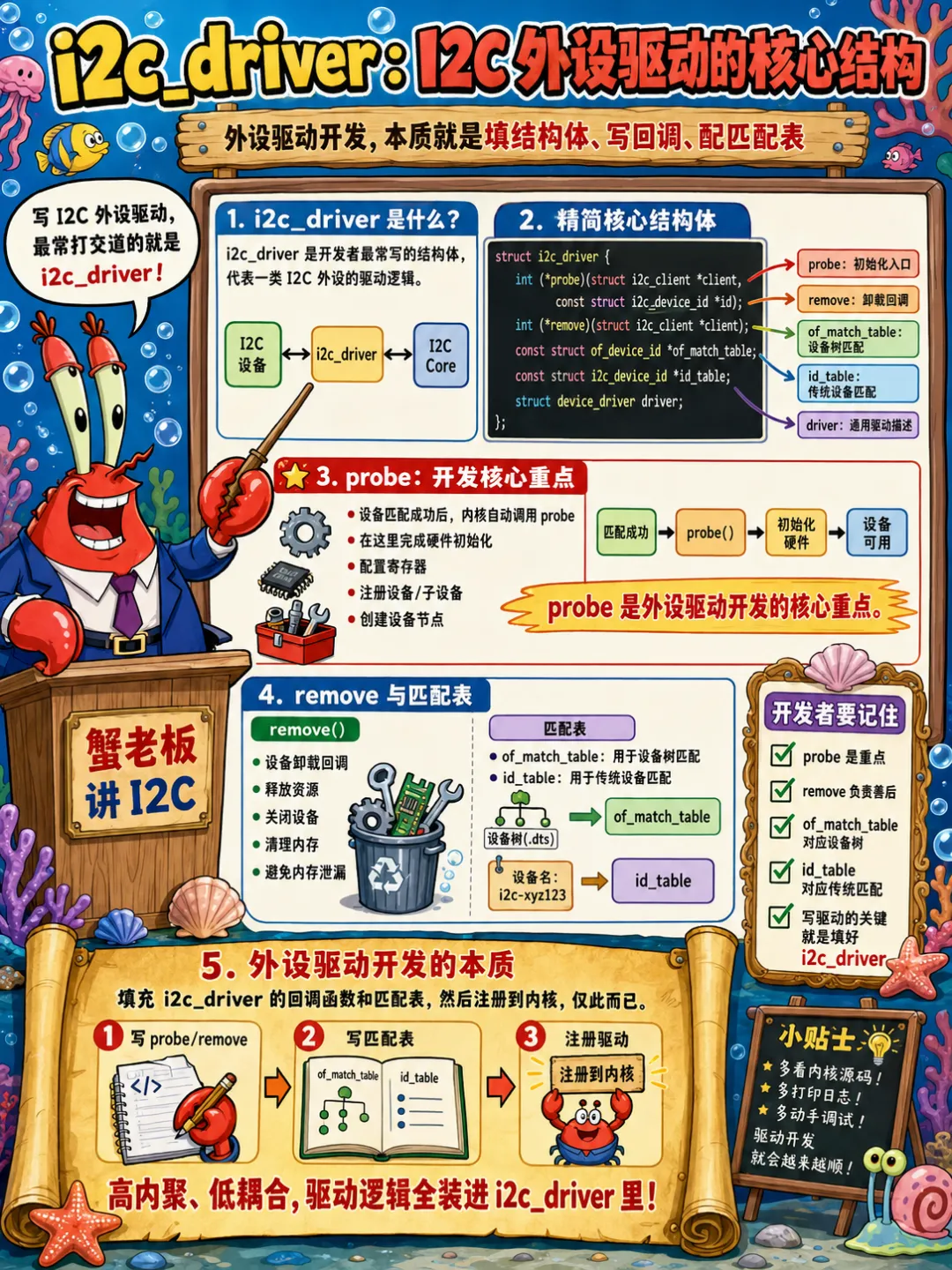
6.3 probe/remove 回调的作用
probe()是驱动和设备的"婚礼"。匹配成功之后,内核调用probe(),驱动在这里"接管"设备。
一个典型的probe()大概长这样:
static int my_sensor_probe(struct i2c_client *client, const struct i2c_device_id *id){struct my_sensor_data *data; /* 1. 分配私有数据 */ data = devm_kzalloc(&client->dev, sizeof(*data), GFP_KERNEL); if (!data) return -ENOMEM; i2c_set_clientdata(client, data); /* 2. 检查设备是否活着 */ if (my_sensor_check_device(client)) { dev_err(&client->dev, "device not found\n"); return -ENODEV; } /* 3. 初始化设备(配置寄存器等) */ my_sensor_init(client); /* 4. 注册到其他子系统 */ data->input_dev = devm_input_allocate_device(&client->dev); /* ... 初始化input设备 ... */ input_register_device(data->input_dev); return 0;}remove()是probe()的反向操作。驱动卸载时,内核调用remove(),驱动在这里释放资源、注销设备。

6.4 驱动如何通过 i2c_client 访问硬件设备
最常见的寄存器读写可以这样封装:
static int xxx_read_u8(struct i2c_client *client, u8 reg, u8 *val){ int ret; ret = i2c_smbus_read_byte_data(client, reg); if (ret < 0) return ret; *val = ret & 0xff; return 0;}static int xxx_write_u8(struct i2c_client *client, u8 reg, u8 val){ return i2c_smbus_write_byte_data(client, reg, val);}如果设备是 16 位寄存器地址,就可以用 i2c_transfer():
static int xxx_read_block(struct i2c_client *client, u16 reg, u8 *buf, int len){ u8 addr_buf[2];struct i2c_msg msgs[2]; int ret; addr_buf[0] = reg >> 8; addr_buf[1] = reg & 0xff; msgs[0].addr = client->addr; msgs[0].flags = 0; msgs[0].len = 2; msgs[0].buf = addr_buf; msgs[1].addr = client->addr; msgs[1].flags = I2C_M_RD; msgs[1].len = len; msgs[1].buf = buf; ret = i2c_transfer(client->adapter, msgs, 2); if (ret == 2) return 0; if (ret >= 0) return -EIO; return ret;}这里有个细节。
i2c_transfer() 成功时返回传输完成的 message 数量,不是返回 0。
所以你经常会看到:
if (ret == 2) return 0;如果你把 ret < 0 当失败,ret == 1 当成功,那就埋坑了。因为 ret == 1 说明只完成了一部分 message,这种情况对组合读写来说通常也是失败。
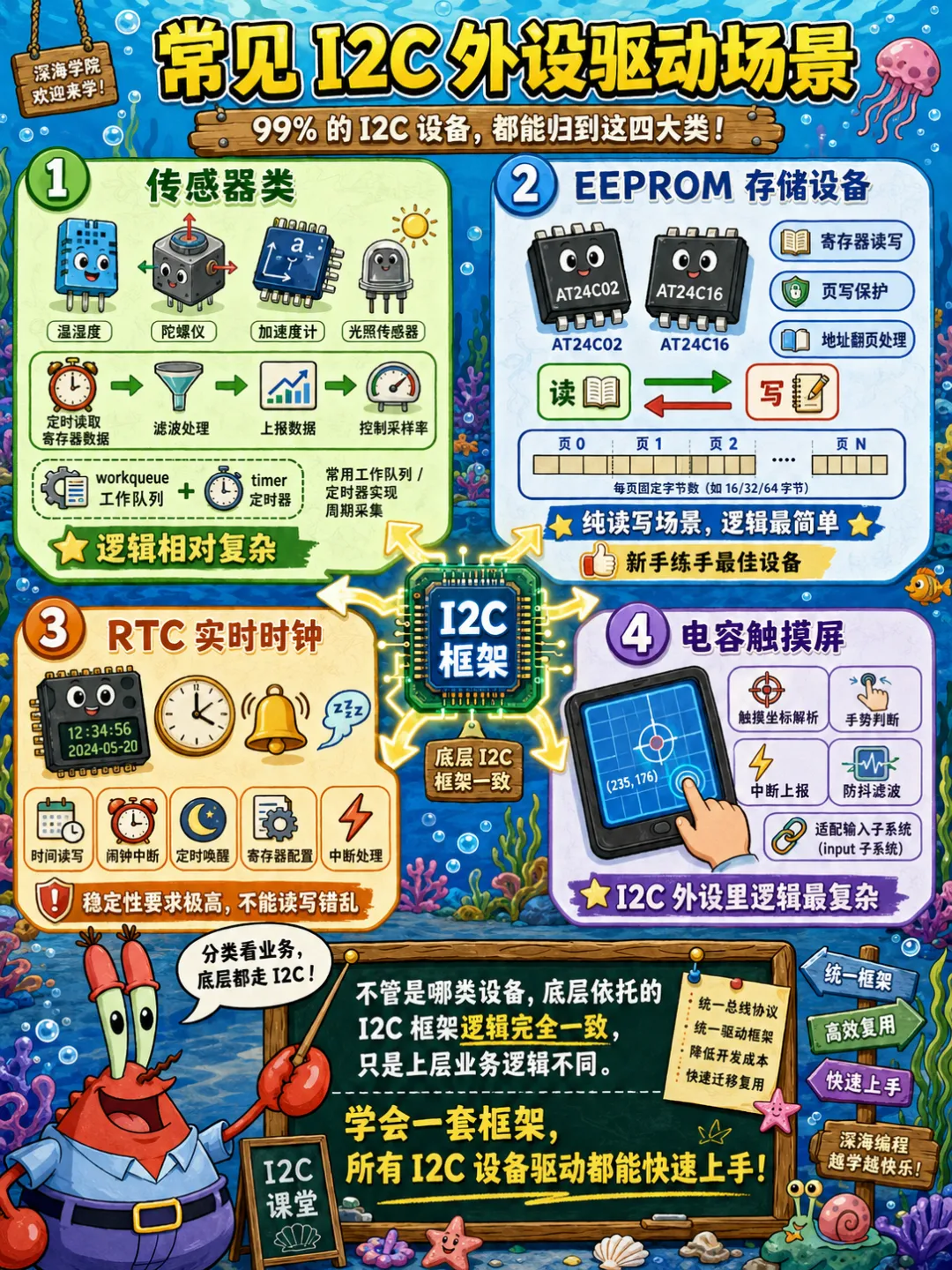
6.5 常见 I2C 外设驱动场景
I2C外设驱动在嵌入式Linux里遍地都是: 传感器(加速度计、陀螺仪、磁力计、温度传感器等):通常注册到IIO(Industrial I/O)子系统。驱动在probe()里初始化传感器,然后提供read_raw()回调供上层读取数据。
EEPROM:比如AT24Cxx系列。驱动在probe()里识别芯片型号,然后注册为一个MTD设备或一个普通的二进制设备。应用程序可以像读写文件一样读写EEPROM。
RTC(实时时钟):注册到RTC子系统。驱动提供read_time()和set_time()回调。用户用hwclock命令就能读写RTC时间。
触摸屏:注册到输入子系统。驱动在中断处理函数里读取触摸坐标,然后通过input_report_abs()上报给输入子系统。
这些驱动业务不同,但底层的I2C读写逻辑都是一样的——调用i2c_transfer()或者i2c_master_send()/recv()。区别只在于上层注册到了哪个子系统。
七、用户态访问层,/dev/i2c-x 与 i2c-dev
7.1 /dev/i2c-x 设备节点是怎么来的
/dev/i2c-X设备节点是i2c-dev驱动生成的。
i2c-dev是I2C子系统里的一个"通用驱动"。它不针对任何具体的I2C设备,而是为每个i2c_adapter创建一个字符设备节点。
每个注册的I2C适配器都有一个编号,i2c-dev会为它创建对应的/dev/i2c-X节点。主设备号是89,次设备号就是适配器的编号。
$ ls -l /dev/i2c-*crw-rw---- 1 root i2c 89, 0 Jan 1 00:00 /dev/i2c-0crw-rw---- 1 root i2c 89, 1 Jan 1 00:00 /dev/i2c-1所有256个次设备号都预留给I2C了。

7.2 i2c-dev 驱动在 I2C 框架中的位置
i2c-dev 介于用户态和内核Core层之间,属于框架的辅助驱动,不参与底层硬件适配,也不替代外设驱动。
i2c-dev 可以理解为 I2C Core 上面的一层用户态桥梁。
它不是某个具体外设的驱动。 它也不理解某个芯片的寄存器。 它只是把用户态请求转换成 I2C Core 能理解的传输请求。
路径大概是:
用户程序 | v/dev/i2c-x | vi2c-dev | vI2C Core | vi2c_adapter | vmaster_xfer()所以用户态访问和内核态外设驱动,底层最终都可能走到 adapter 的传输函数。
这也是为什么 i2cdetect 可以用来判断底层总线是否基本可用。
但它不是万能的。 有些设备不喜欢被扫描。 有些地址被内核驱动占用。 有些设备读写需要特殊时序。 有些芯片扫一下可能改变状态。
所以在线上产品里,别随便乱扫 I2C 总线。实验室里可以,量产环境慎重。

7.3 用户态通过 ioctl 访问 I2C 设备
一个简单用户态访问例子:
#include <stdio.h>#include <fcntl.h>#include <unistd.h>#include <sys/ioctl.h>#include <linux/i2c-dev.h>int main(void){ int fd; int ret; unsigned char reg = 0x00; unsigned char val; fd = open("/dev/i2c-1", O_RDWR); if (fd < 0) { perror("open"); return -1; } ret = ioctl(fd, I2C_SLAVE, 0x50); if (ret < 0) { perror("ioctl"); close(fd); return -1; } ret = write(fd, ®, 1); if (ret != 1) { perror("write"); close(fd); return -1; } ret = read(fd, &val, 1); if (ret != 1) { perror("read"); close(fd); return -1; } printf("val = 0x%02x\n", val); close(fd); return 0;}这个例子能说明思路,但实际项目里更推荐使用 I2C_RDWR 做组合传输。因为很多寄存器读操作要求 repeated start,而简单的 write 再 read 不一定满足设备时序要求。
I2C_RDWR 示例:
#include <stdio.h>#include <fcntl.h>#include <unistd.h>#include <sys/ioctl.h>#include <linux/i2c-dev.h>#include <linux/i2c.h>int main(void){ int fd; unsigned char reg = 0x00; unsigned char val = 0;struct i2c_msg msgs[2];struct i2c_rdwr_ioctl_data data; fd = open("/dev/i2c-1", O_RDWR); if (fd < 0) { perror("open"); return -1; } msgs[0].addr = 0x50; msgs[0].flags = 0; msgs[0].len = 1; msgs[0].buf = ® msgs[1].addr = 0x50; msgs[1].flags = I2C_M_RD; msgs[1].len = 1; msgs[1].buf = &val; data.msgs = msgs; data.nmsgs = 2; if (ioctl(fd, I2C_RDWR, &data) < 0) { perror("I2C_RDWR"); close(fd); return -1; } printf("val = 0x%02x\n", val); close(fd); return 0;}这个更接近内核态 i2c_transfer() 的使用方式。

7.4 i2c-tools 工具的使用场景
做嵌入式调试,i2c-tools是我用得最多的工具,没有之一。排查I2C问题,90%的场景靠这一套工具就能定位问题,不用写代码、不用编译驱动,效率拉满。
i2cdetect:扫描I2C总线上的设备。
i2cdetect -y 1输出一个地址矩阵,有设备的地方显示地址,没设备的地方显示--。这是排查I2C硬件问题的第一招。
i2cget:读取设备寄存器的值。
i2cget -y 1 0x50 0x10读地址0x50的设备、寄存器0x10的值。
i2cset:写设备寄存器。
i2cset -y 1 0x50 0x10 0x55i2cdump:批量读取设备所有寄存器。
i2ctransfer:最灵活的命令,支持复合传输。

7.5 用户态访问与内核态驱动访问的区别
用户态通过/dev/i2c-X访问和内核态通过i2c_transfer()访问,底层走的是同一条路。区别在于:
内核态驱动可以享受完整的设备模型支持——probe/remove、电源管理、热插拔。驱动可以注册到其他子系统(输入、IIO、hwmon等),让应用程序通过标准接口访问设备。
用户态访问更灵活、更快速。写一个用户态程序访问I2C设备,改完代码重新编译就能跑,不需要编译内核、不需要重启。适合调试和原型验证。
但用户态访问无法利用设备模型(没有probe/remove、没有电源管理)、无法注册到其他子系统(只能自己处理数据)、存在安全风险(任何有权限的用户都能操作I2C总线)。
实际开发中,我一般是先用i2c-tools和用户态程序验证硬件和通信没问题,然后再写内核驱动。这样把问题分开排查,效率高很多。

八、一次 I2C 读写请求的完整调用链
8.1 内核态 I2C 读写的典型调用方式
前面讲了分层结构,现在我们串起完整调用链,把所有知识点落地。先从最常用的内核态读写开始,这是驱动开发的核心流程。
在内核态外设驱动里,常见调用是:
ret = i2c_smbus_read_byte_data(client, reg);或者:
ret = i2c_transfer(client->adapter, msgs, num);前者更简单,后者更灵活。
不管用哪种方式,最终都要找到 client 所属的 adapter,然后让 adapter 背后的控制器驱动完成传输。
这条链可以简化成:
外设驱动 | v`i2c_smbus_xxx()` / `i2c_transfer()` | vI2C Core | vclient->adapter | vadapter->algo->master_xfer() | vSoC I2C 控制器驱动 | v硬件寄存器 | vSCL/SDA这就是从软件到硬件的完整路径。
读懂这条路径,调问题就有方向了。
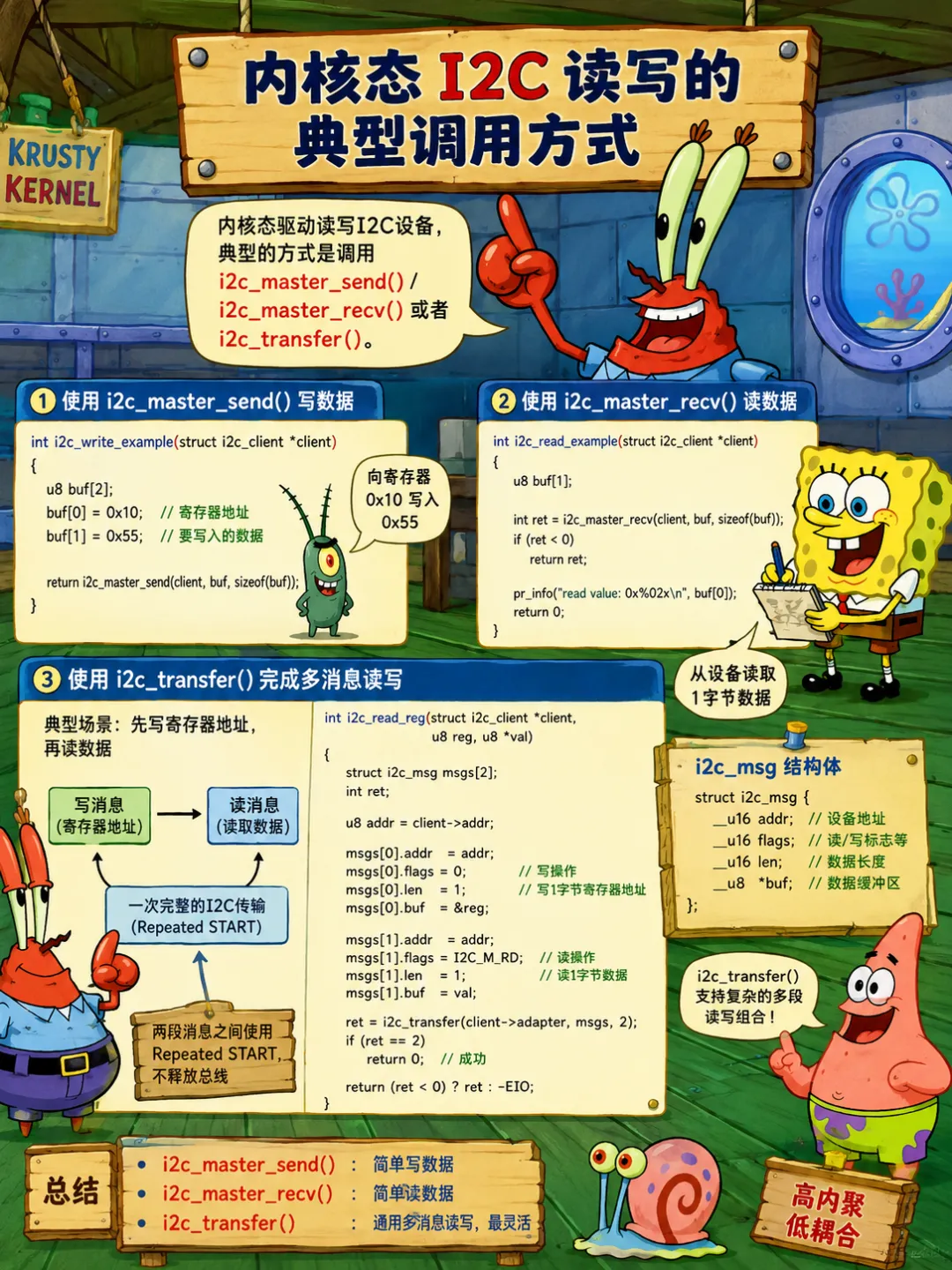
8.2 i2c_msg 如何描述一次 I2C 传输
i2c_msg 是标准 I2C 传输的基本描述单元,不管是内核态还是用户态传输,最终都会封装成i2c_msg消息。
核心结构体如下:
struct i2c_msg { __u16 addr; /* 从设备地址 */ __u16 flags; /* 读写标志、特殊时序标志 */ __u16 len; /* 数据长度 */ __u8 *buf; /* 数据缓冲区 */};flags是核心成员,0代表写操作,I2C_M_RD代表读操作。还支持无停止信号、10位地址等特殊时序配置,适配各类非标I2C设备。
一次完整的寄存器读取操作,必须由两个msg组成。第一个msg写寄存器地址,第二个msg读寄存器数据。内核支持批量传入多个msg,一次性完成多段时序,效率极高。

8.3 i2c_transfer() 到 adapter->algo->master_xfer() 的调用路径
i2c_transfer()的调用链大概是这样:
`i2c_transfer()` └── `__i2c_transfer()` [17†L9] └── adapter->algo->master_xfer(adapter, msgs, num)__i2c_transfer()在调用master_xfer之前会做一些准备工作:加锁(防止多个线程同时访问同一条总线)、检查adapter是否支持这次传输、处理10位地址的转换等。
然后就是调用adapter->algo->master_xfer()。这个函数指针指向控制器驱动实现的传输函数。

8.4 控制器驱动如何真正操作硬件完成传输
控制器驱动的master_xfer()是真正操作硬件的地方。
它要做的事情:
1. 准备硬件:使能时钟、配置传输参数(速率、模式等) 2. 发起传输:写控制寄存器,触发START条件+发送设备地址 3. 等待中断:用 wait_for_completion()等待中断处理函数通知传输完成4. 中断处理:在ISR里一个字节一个字节地处理数据收发,处理ACK/NACK,处理STOP条件 5. 返回结果:传输完成后,返回成功传输的消息数量或错误码
为了让你感受一下,我贴一段简化版的master_xfer伪代码:
static int my_i2c_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num){struct my_i2c *i2c = i2c_get_adapdata(adap); int i, ret; for (i = 0; i < num; i++) { /* 设置传输方向 */ if (msgs[i].flags & I2C_M_RD) my_i2c_set_read(i2c); else my_i2c_set_write(i2c); /* 设置设备地址 */ my_i2c_set_addr(i2c, msgs[i].addr); /* 设置数据缓冲区和长度 */ my_i2c_set_buf(i2c, msgs[i].buf, msgs[i].len); /* 触发硬件传输 */ reinit_completion(&i2c->done); my_i2c_start(i2c); /* 等待中断 */ ret = wait_for_completion_timeout(&i2c->done, HZ); if (ret == 0) { ret = -ETIMEDOUT; goto out; } if (i2c->error) { ret = i2c->error; goto out; } } return num;out: /* 错误处理:发STOP、复位控制器等 */ return ret;}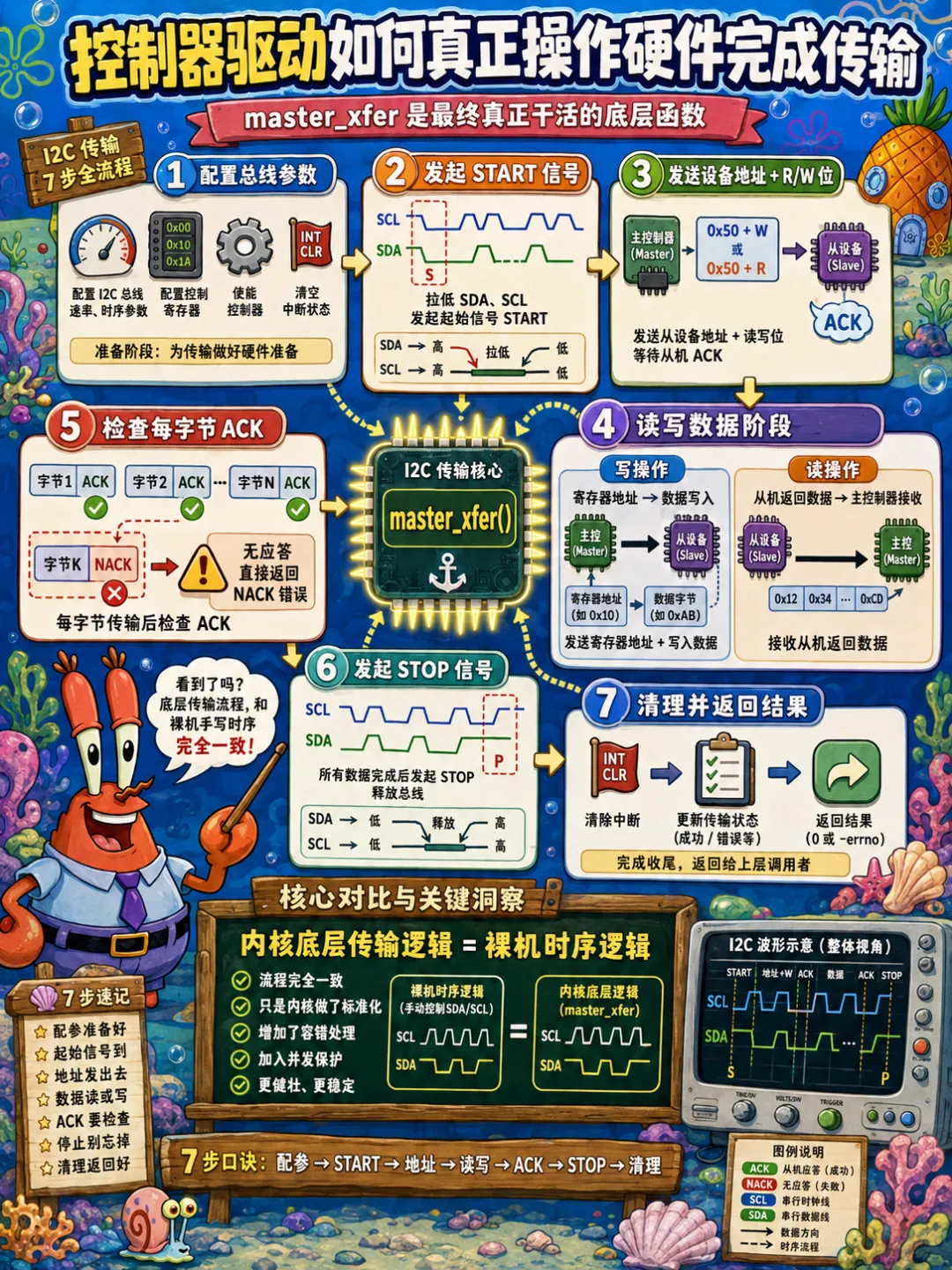
8.5 用户态访问 I2C 时的调用链差异
用户态通过/dev/i2c-X访问时,调用链多了几层:
用户程序 read()/ioctl() └── VFS └── i2c-dev.c: `i2cdev_read()` / `i2cdev_ioctl()` [5†L21-L22] └── `i2c_transfer()` [17†L9] └── `__i2c_transfer()` └── adapter->algo->master_xfer() └── 硬件操作i2c-dev从用户空间复制数据到内核空间(或反过来),然后调用i2c_transfer()。之后的路和内核态调用完全一样。
唯一的区别是:用户态调用要经过系统调用、VFS、权限检查等额外开销。但这也带来了好处——用户态程序可以不用写内核代码就能操作I2C设备。

九、设备树、匹配机制与注册流程
9.1 I2C 控制器节点在设备树中的描述方式
一个 I2C 控制器节点通常描述 SoC 内部的 I2C 控制器资源。
比如:
i2c2: i2c@fe5a0000 { compatible = "rockchip,rk3399-i2c"; reg = <0x0 0xfe5a0000 0x0 0x1000>; interrupts = <GIC_SPI 34 IRQ_TYPE_LEVEL_HIGH>; clocks = <&cru SCLK_I2C2>, <&cru PCLK_I2C2>; clock-names = "i2c", "pclk"; pinctrl-names = "default"; pinctrl-0 = <&i2c2_xfer>; #address-cells = <1>; #size-cells = <0>; status = "okay";};这里每个字段都可能影响驱动。
compatible用来匹配控制器驱动。
reg描述寄存器地址。
interrupts描述中断。
clocks描述时钟资源。
pinctrl-0描述 SCL/SDA 引脚复用。
status = "okay"表示启用。
如果控制器节点没起来,下面的 I2C 子设备也没戏。因为 adapter 都没注册,client 从哪来?
9.2 I2C 子设备节点如何描述外设地址和 compatible
I2C 外设节点通常写在控制器节点下面:
&i2c2 { status = "okay"; temperature@48 { compatible = "vendor,temp-sensor"; reg = <0x48>; }; eeprom@50 { compatible = "atmel,24c02"; reg = <0x50>; pagesize = <8>; };};外设节点里的 reg 是 I2C 地址。
节点名里的 @48 通常也对应地址,方便阅读和设备树规范检查。
compatible 用来匹配外设驱动。
如果外设还有中断、电源、复位,也会继续加属性:
touch@38 { compatible = "vendor,touch-ic"; reg = <0x38>; interrupt-parent = <&gpio1>; interrupts = <10 IRQ_TYPE_EDGE_FALLING>; reset-gpios = <&gpio2 5 GPIO_ACTIVE_LOW>; vdd-supply = <&vcc_3v3>;};这些属性不会自动让设备工作。它们只是描述硬件连接。驱动要主动读取并使用这些资源。
设备树不是魔法。它只是硬件说明书的一种代码化表达。
9.3 设备树解析后如何生成 i2c_client
当 I2C adapter 注册后,I2C Core 会扫描该 adapter 下面的设备树子节点。
对于每个可用子节点,内核会创建对应的 i2c_client。
这个 client 里会保存:
I2C 地址。
所属
adapter。
设备树节点信息。
设备对象。
然后设备模型会尝试匹配对应的 i2c_driver。
流程可以画成这样:
设备树 i2c 控制器节点 | vplatform_driver probe | v注册 `i2c_adapter` | vI2C Core 解析子节点 | v创建 `i2c_client` | v匹配 `i2c_driver` | v调用外设驱动 probe所以一个外设驱动 probe 的触发,前面其实走了很多步骤。
你只看到 probe 没进,但它可能卡在任何一环。
9.4 of_match_table 与 i2c_device_id 的匹配关系
现代嵌入式 Linux 大多用设备树,所以 of_match_table 很常见。
但 i2c_device_id 仍然建议保留。
一方面是为了传统非设备树方式。
另一方面模块自动加载时也可能依赖相关信息。
一个常见写法是:
static conststruct of_device_id xxx_of_match[] = { { .compatible = "vendor,xxx" }, { }};MODULE_DEVICE_TABLE(of, xxx_of_match);static conststruct i2c_device_id xxx_id[] = { { "xxx", 0 }, { }};MODULE_DEVICE_TABLE(i2c, xxx_id);staticstruct i2c_driver xxx_driver = { .driver = { .name = "xxx", .of_match_table = xxx_of_match, }, .probe = xxx_probe, .remove = xxx_remove, .id_table = xxx_id,};设备树匹配看 compatible。
传统 ID 匹配看 name。
如果你发现手动 insmod 后 probe 不进,除了看 compatible,也要看模块 alias 有没有生成,驱动有没有真的注册进 I2C bus。
可以用:
modinfo xxx_driver.ko看里面有没有 of alias 或 i2c alias。
这个细节有时候挺救命。
9.5 设备没有进入 probe 的常见原因
probe 不进是 I2C 驱动最常遇到的问题之一。
常见原因不少,比如: 控制器节点没开:
status = "disabled";compatible 拼错:
compatible = "vender,xxx";驱动里是:
.compatible = "vendor,xxx";vendor 写成 vender,这种错真有人犯。别问我怎么知道的。
外设节点没放在 I2C 控制器节点下面。
#address-cells 或 #size-cells 不对。
I2C 控制器驱动没加载,adapter 没注册。
外设驱动没编进内核,也没加载模块。
内核版本 probe 原型改了,驱动代码没适配好。
设备地址非法,或者和其他设备冲突。
pinctrl 报错导致控制器 probe 失败。
排查建议按顺序来。
看 adapter:
ls /sys/class/i2c-adapter/看内核日志:
dmesg | grep -i i2c看设备树是否生效:
ls /proc/device-tree/看驱动是否加载:
lsmod看设备是否出现在 sysfs:
find /sys/bus/i2c/devices/ -maxdepth 1 -type l这比直接改驱动靠谱。
十、调试方法与常见问题
10.1 使用 dmesg 查看 I2C 控制器和设备注册信息
调 I2C,第一步看日志。
dmesg | grep -i i2c你要关注几类信息。
控制器驱动有没有 probe。
adapter 有没有注册。
pinctrl 有没有失败。
clock 有没有获取失败。
外设驱动有没有 probe。
有没有 NACK、timeout、bus busy。
如果你在驱动里加日志,建议带上 adapter 名称和设备地址:
dev_info(&client->dev, "probe addr=0x%x adapter=%s\n", client->addr, client->adapter->name);传输失败时也别只打印 “i2c read failed”。
多打印一点上下文:
dev_err(&client->dev, "read reg 0x%02x failed, ret=%d\n", reg, ret);未来你会感谢现在的自己。真的。
10.2 使用 i2cdetect、i2cget、i2cset 定位通信问题
常见调试流程:
i2cdetect -l确认总线。
i2cdetect -y 1扫描地址。
i2cget -y 1 0x48 0x00读寄存器。
i2cset -y 1 0x48 0x10 0x01写寄存器。
但工具使用要小心。
i2cset 可能改设备状态。
i2cdetect 对某些设备不友好。
如果地址显示 UU,通常表示这个地址已经被内核驱动占用。
比如:
0 1 2 3 4 5 6 7 8 9 a b c d e f30: -- -- -- -- -- -- -- -- UU -- -- -- -- -- -- --这不一定是坏事。它说明内核已经有驱动绑定了这个地址。你再从用户态访问,可能会冲突。
线上产品别随便拿工具怼。调试工具很好,但别把调试习惯带到量产脚本里,容易搞事情。
10.3 使用逻辑分析仪观察 SCL、SDA 波形
软件调不通的时候,就上逻辑分析仪了。
I2C 是低速总线,逻辑分析仪非常好用,触发抓取一段通信波形,就能看到:
• START条件对不对 • 设备地址发对了没有 • 从设备有没有回ACK • 数据位是否正确 • STOP条件有没有
有时候日志显示 timeout,但真正原因要看波形。
比如:
SCL 根本没动,可能 pinctrl 或 clock 有问题。
SCL 有,SDA 没变化,可能引脚复用或上拉有问题。
地址发出去了,设备 NACK,可能地址错、电源没开、reset 没释放、芯片没焊好。
读到数据全 0xff,可能总线空读、上拉太强、设备没响应。
波形边沿很慢,可能上拉电阻过大、线太长、电容太大。
这种问题靠代码看不出来。别硬看。上仪器。
我见过有人调 I2C 调两天,不上逻辑分析仪。最后一接,发现 SCL/SDA 接反。那一瞬间会议室安静了三秒钟。太真实了。
10.4 I2C 设备不识别的常见原因
设备在i2cdetect里扫不到,最常见的原因:
供电问题。设备没电、或者电压不对(3.3V的设备接了1.8V)。
引脚连接错误。SCL和SDA接反了、或者没接对引脚。
上拉电阻缺失或阻值不对。I2C是开漏的,必须要有上拉电阻。阻值太大上升沿太慢,阻值太小功耗太大。通常4.7kΩ是个安全的选择。
地址错误。设备数据手册上的地址可能是8位的(含读写位),而i2cdetect用的是7位地址。别搞混了。
总线被占用。另一个设备把总线拉低了(SCL或SDA一直低电平)。用示波器看一眼两根线的电平。
时钟太快。设备支持不了400kHz,但控制器配成了400kHz。改成100kHz试试。
10.5 I2C 通信超时、NACK、总线挂死的排查思路
通信超时:master_xfer()返回-ETIMEDOUT。
可能原因:设备没响应(检查供电和连接)、时钟配置不对、中断没触发(检查中断号和中断引脚配置)。先用i2cdetect确认设备能不能被扫到。
NACK错误:设备回了NACK而不是ACK。
可能原因:地址不对、设备忙、命令不支持、写入了只读寄存器。用逻辑分析仪抓一下波形,看看到底是哪一步出了NACK。
总线挂死:SCL或SDA一直保持低电平,后续所有通信都失败。
I2C总线挂死通常是因为设备异常将总线拉低。解决办法:
1. 硬件复位设备(断电重启) 2. 软件复位I2C控制器(有些控制器支持软件复位) 3. 如果控制器支持,发送9个时钟脉冲来解锁总线
预防措施:在驱动里加超时处理,超时后主动复位控制器。
十一、总结,Linux I2C 分层设计的核心思想
11.1 控制器驱动负责“怎么发”
Linux I2C 框架最底层的关键,是控制器驱动。
它负责把一个抽象的 I2C 传输请求,变成真实硬件动作。
怎么配置寄存器。
怎么处理 FIFO。
怎么等中断。
怎么处理 NACK。
怎么发 STOP。
这些都属于“怎么发”。
控制器驱动写得好,上层外设驱动就舒服。控制器驱动有坑,所有挂在这条总线上的设备都会跟着倒霉。
这也是为什么有些板子上“一堆 I2C 设备都不稳定”,最后发现不是外设问题,而是控制器驱动或者 pinctrl、clock 配置问题。
11.2 外设驱动负责“发什么”
外设驱动不该关心控制器寄存器。
它关心的是芯片业务。
写哪个寄存器。
读哪个寄存器。
初始化顺序是什么。
中断来了怎么处理。
数据怎么上报给内核子系统。
比如一个温度传感器驱动,它应该关心温度寄存器怎么解析,而不是关心 I2C 控制器怎么产生 START。
一个触摸屏驱动,它应该关心坐标数据怎么读取和上报,而不是关心 SCL 高电平保持多久。
这就是分层。
这也是代码可移植的基础。
11.3 I2C Core 负责连接控制器、设备和驱动
I2C Core 是中间的组织者。
它把 adapter 注册进来。
把设备树子节点变成 client。
把 i2c_driver 注册进设备模型。
把传输请求转发给底层 adapter。
它不直接面对业务,也不直接面对寄存器,但它决定整套框架能不能顺畅工作。
很多时候我们写驱动,只接触到 i2c_driver 和 i2c_client,容易忽略 I2C Core 的存在。但出问题的时候,你就会发现它很关键。
probe 为什么触发?
client 怎么来的?
adapter 怎么找?
transfer 怎么到底层?
答案都在 I2C Core 这条线上。
11.4 Adapter、Client、Driver 三者关系回顾
最后再把这三个对象拎出来。
i2c_adapter 是总线。
i2c_client 是设备。
i2c_driver 是驱动。
关系如下:
一条 I2C 总线 -> 一个 `i2c_adapter`总线上的一个外设 -> 一个 `i2c_client`能驱动某类外设的代码 -> 一个 `i2c_driver`通信路径:
`i2c_driver` -> `i2c_client` -> `i2c_adapter` -> `i2c_algorithm` -> `master_xfer` -> 控制器硬件设备注册路径:
设备树控制器节点 -> platform_driver probe -> `i2c_add_adapter` -> 解析 I2C 子设备节点 -> 创建 `i2c_client` -> 匹配 `i2c_driver` -> 调用 probe用户态路径:
/dev/i2c-x -> i2c-dev -> I2C Core -> `i2c_adapter` -> `master_xfer`这几条线掌握了,Linux I2C 框架就不再是一堆散乱 API。
它是一张网。
11.5 Linux I2C 框架的解耦、复用与可移植性价值
Linux I2C 框架真正厉害的地方,不是封装了几个读写函数。
它厉害在解耦。
SoC 控制器驱动和外设驱动解耦。
设备描述和驱动代码解耦。
用户态调试和内核态正规驱动共用底层传输能力。
不同平台可以复用同一个外设驱动。
不同外设可以复用同一个 adapter。
这就是 Linux 驱动框架的味道。
一开始看,结构体多,路径长,感觉麻烦。
写多了以后你会发现,这些麻烦其实是在替你挡更大的麻烦。
如果没有这套框架,每个外设驱动都要自己适配不同 SoC 控制器,自己管总线锁,自己处理设备注册,自己暴露用户态接口。那才是真的乱。
所以学 Linux I2C,不要只停留在“我会调用i2c_smbus_read_byte_data()”这个层面。
你要知道 client 从哪来。
adapter 谁注册。
driver 怎么匹配。
transfer 怎么走到底层。
设备树如何参与。
用户态访问为什么能走同一条总线。
这些东西串起来之后,再看 I2C 驱动,你会轻松很多。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Linux中漂亮的系统监视面板
- 新手到底要不要学 Linux?这篇文章把"为什么"和"怎么用"讲清楚
- 【第41期】七月CIE_Python编程训练营报名啦!
- Linux foundation的CTO如何看开源AI的发展
- Windows下的Linux内核编译和测试
- CAS 和 MGLRU 进入 Linux 7.2——Linux 调度器的 cache 盲区与 LRU 的冷热误判,困扰数据库工作负载几十年
- 我用Python写了个进销存工具,专治出口发货预配的各种“老大难
- 2026自学Python顺序,存下吧,很难找全的
- python的库polars实现价格段分析
- Python二阶第4课|函数综合实战!从零制作多功能计算器,吃透模块化编程
