全景介绍
低功耗设计里经常遇到一个矛盾:系统想省电,但业务不能接受太长的响应延迟。CPUIdle 想进入深度 idle 状态,Runtime PM(运行时电源管理)想把设备挂起,CPUFreq 或 devfreq(设备频率调节)想把频率降下来,这些动作都能省电,但都可能带来恢复延迟、吞吐量下降或者响应抖动。
PM QoS(Power Quality of Service,电源质量服务) 处理的就是这类边界问题。
它不是一个直接执行省电动作的框架,也不是 CPUIdle、CPUFreq、Runtime PM 的替代品。它提供一套约束管理机制,让驱动、子系统或者用户态进程声明自己能接受的 latency(延迟)、frequency(频率)或者设备恢复边界。执行低功耗动作的框架做决定前会读取这些约束,判断当前动作是否允许。
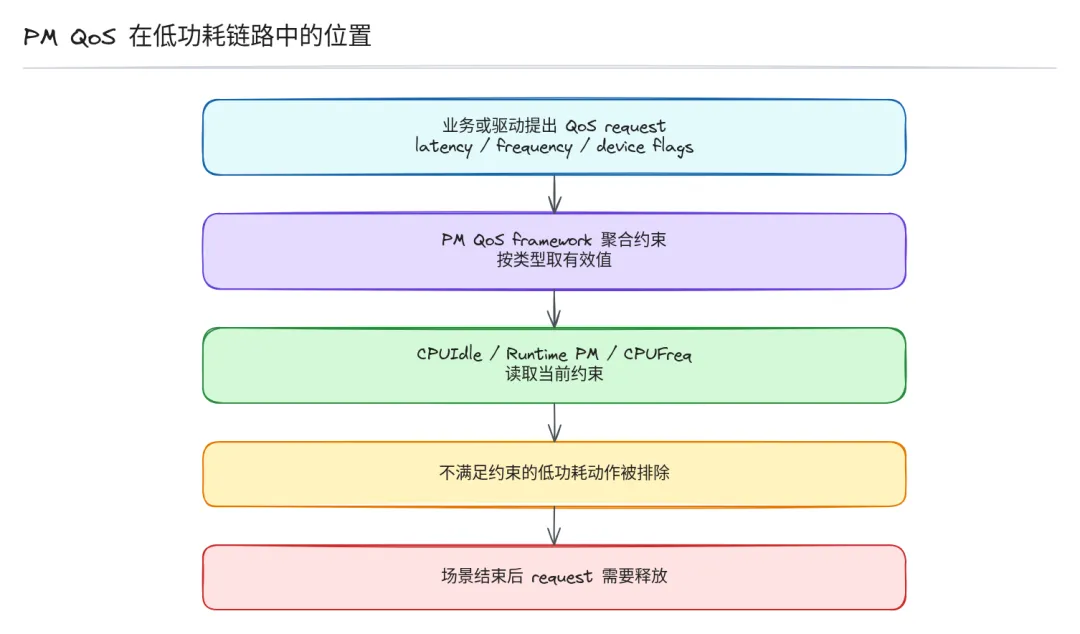
所以 PM QoS 要放在约束传播链路里理解:需求方提交 request(请求) → PM QoS framework 聚合 request → 执行方读取聚合结果 → 再决定能不能进入某个低功耗状态。
实际情况
PM QoS 容易被误解成"打开之后更省电"。实际方向通常相反:PM QoS 大多数时候是在阻止过于激进的低功耗动作。
- • 音频播放期间,系统可能需要较低的 CPU/DMA 响应延迟
- • 相机预览期间,某些设备不能随便 runtime suspend(运行时挂起)
- • 网络高吞吐场景下,太低频率可能影响数据处理能力
- • 显示链路在高刷新阶段,也可能需要设备保持较短恢复路径
这类需求如果不进入统一约束框架,每个子系统都会自己做一套判断,最后很难解释为什么 CPU 睡不深、设备不挂起、频率降不下来。PM QoS 的价值不是替执行框架做决定,而是把这些业务约束变成执行框架能读取的统一边界。
很多功耗问题表面看起来像是执行方异常:CPUIdle 进不了深度 idle、Runtime PM 不发生 suspend、genpd(generic power domain,通用电源域)不掉电、CPUFreq/devfreq 不降频。实际上第一步应该先问:是不是还有哪条 QoS request 处在生效状态。
抽象对象
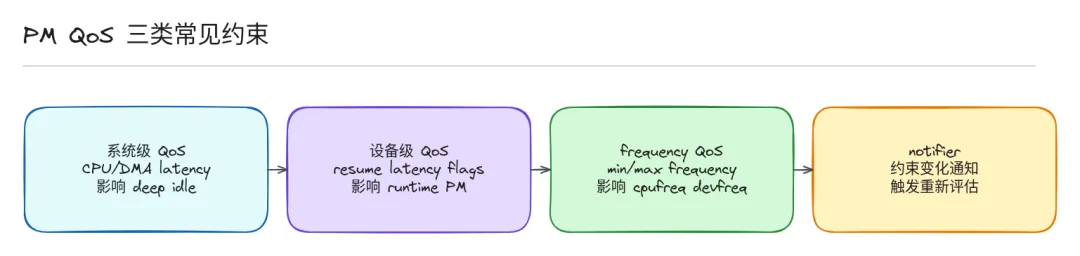
PM QoS 核心对象可以分成 request(请求)、constraint(约束)、notifier(通知器)三类,再按作用范围分出系统级 QoS、设备级 QoS 和 frequency QoS。我们结合 Linux 源码定义来理解:
核心对象
// include/linux/pm_qos.h
/* 1. request:需求方提交的一条约束 */
struct pm_qos_request {
struct plist_node node; // 挂到对应 constraint 的链表上
int data; // 约束值,比如 latency 限制数值
...
};
/* 2. constraint:一组同类 request 聚合后的结果 */
struct pm_qos_constraints {
struct plist_head requests; // 所有 request 挂在这里
int default_value; // 默认值,没有 request 时用这个
int no_constraint; // 完全没有约束时的取值
int *target; // 当前聚合结果,输出给执行方
...
};
/* 3. notifier:约束变化通知,让执行方重新评估 */
struct blocking_notifier_head *notifier;
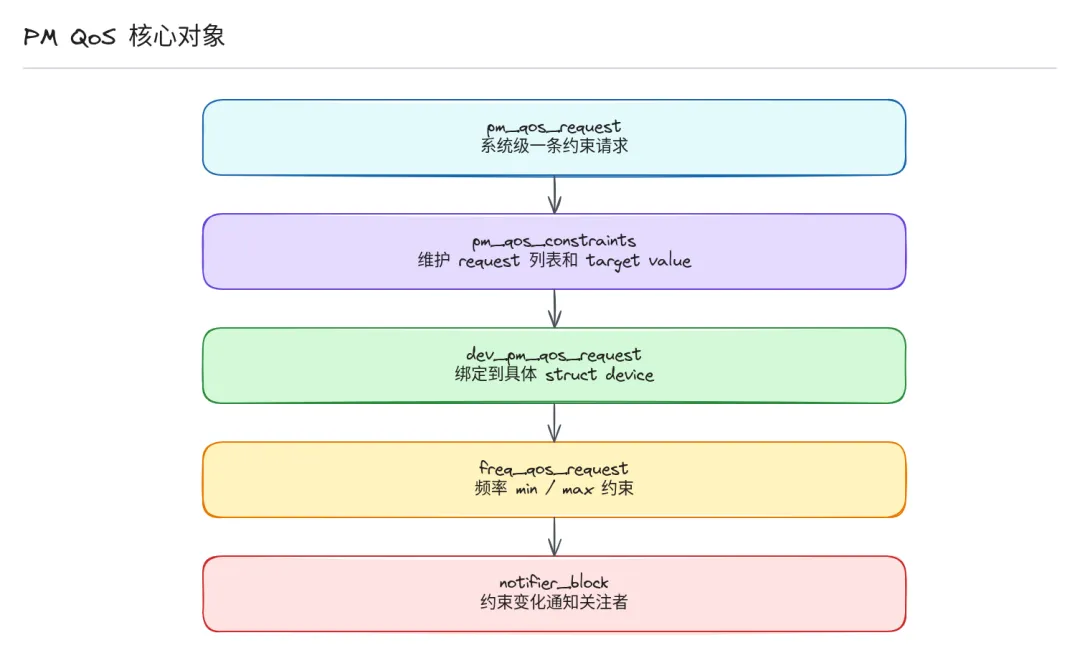
- • request:代表需求方提交的一条约束。需求方可以是驱动、子系统,也可以是用户态进程。request 不是一次性写入的变量,它有完整生命周期:add(添加)、update(更新)、remove(移除)。源码里用
plist_node 把 request 挂到 constraint 的链表上,方便聚合计算。 - • constraint:保存一组同类 request,聚合计算出当前生效的约束值。latency 类约束通常取更严格(更小)的值,frequency min/max 也有各自聚合方式:min 取最大值,max 取最小值。
- • notifier:约束变化时通知监听者。某些执行路径或者平台模块需要在 QoS 变化时重新评估当前状态,就可以监听对应 constraint 更新。
按作用范围分类
系统级 PM QoS
常见入口是 CPU/DMA latency 约束。定义在 kernel/power/qos.c 全局:
struct pm_qos_constraints cpu_dma_constraints;
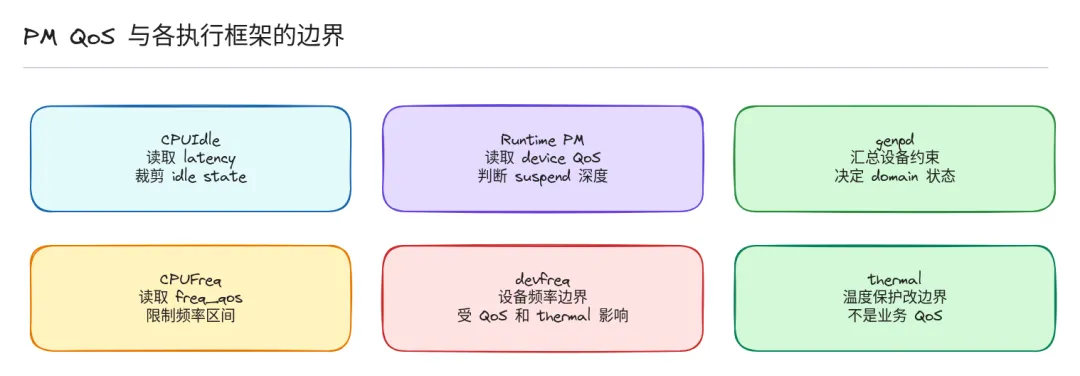
它影响系统从低功耗状态响应 CPU 或者 DMA 事件的延迟边界,CPUIdle 会参考它裁剪深度 idle 状态。
设备级 PM QoS(per-device)
绑定到具体 struct device,定义在 include/linux/pm_qos.h:
struct dev_pm_qos {
struct pm_qos_constraints latency; // resume latency 约束
struct pm_qos_constraints latency_noirq; // 无锁上下文 resume latency 约束
struct pm_qos_constraints flags; // PM 标志约束
...
};
它约束设备恢复延迟、激活延迟容忍或者 PM 标志,更多影响 Runtime PM、设备 suspend/resume、genpd 和驱动自己的电源状态选择。
frequency QoS(频率 QoS)
处理频率边界,定义在 include/linux/freq_qos.h:
struct freq_constraints {
struct pm_qos_constraints max_freq; // 最高频率约束
struct pm_qos_constraints min_freq; // 最低频率约束
...
};
CPUFreq 和 devfreq 可以通过 freq_qos 聚合 min/max request,形成当前允许的频率区间。
模型
PM QoS 模型可以压缩成三段:需求方 → 约束框架 → 执行方。
- 1. 需求方提交约束:来源可以是内核驱动、子系统,也可以是用户态服务。约束可能是 CPU/DMA latency,也可能是某个设备的 resume latency(恢复延迟),或是频率下限、频率上限这类边界。
- 2. 约束框架保存 request,并按约束类型计算聚合值:这个聚合不是记录最近一次写入,而是根据 constraint 语义取 min、max 或者其他有效值。约束变化时,framework 可以通过 notifier 通知关注者,让执行方重新评估状态。
- 3. 执行方读取约束:CPUIdle、Runtime PM、genpd、CPUFreq、devfreq 这些路径在做低功耗决策时,读取当前约束,把不满足条件的动作排除掉。
这里一定要分清边界:PM QoS 不负责让 CPU 进入 idle 状态,CPUIdle governor(选择策略)仍然负责选 state;PM QoS 也不直接切频率,CPUFreq/devfreq 的频率选择仍然由 governor、policy、OPP(Operating Performance Point)和 firmware 完成。它只提供约束边界,最终决定还是留给原来的执行框架。
数据流
PM QoS 的数据流从 request 提交开始:
系统级 latency 场景下,内核驱动可以调用 pm_qos_add_request() 添加 request,也可以通过 pm_qos_update_request() 更新值,最后用 pm_qos_remove_request() 移除。用户态则常见通过 /dev/cpu_dma_latency 写入 latency 值,fd(文件描述符)关闭时 request 自动移除。
per-device 场景下,request 绑定到具体 device。驱动或子系统通过 dev_pm_qos 接口提交设备恢复延迟、flags 或者 latency tolerance。Runtime PM 和设备 PM 路径在准备 suspend/resume 时会读取这些约束。
frequency 场景下,freq_qos 通常挂在 cpufreq policy 或 devfreq 相关对象上。min request 用来抬高最低频率,max request 用来压低最高频率。多个 request 聚合后形成当前有效频率区间。
执行方读取聚合结果后,不是"照着 PM QoS 执行动作",而是把它作为候选动作的过滤条件:
- • CPUIdle 会排除 exit latency 超过约束的 state
- • Runtime PM 会结合 usage_count、wakeup、设备依赖和 QoS 判断能否挂起
- • CPUFreq/devfreq 会把目标频率限制在有效区间内
如果平台由 SCMI/CPPC/vendor firmware 接管,Linux 发出的请求流到 firmware 后还可能继续被处理。Linux 只能看到请求、回读和统计,固件内部为什么拒绝或裁剪,需要平台文档或 vendor trace 才能确认。
运行
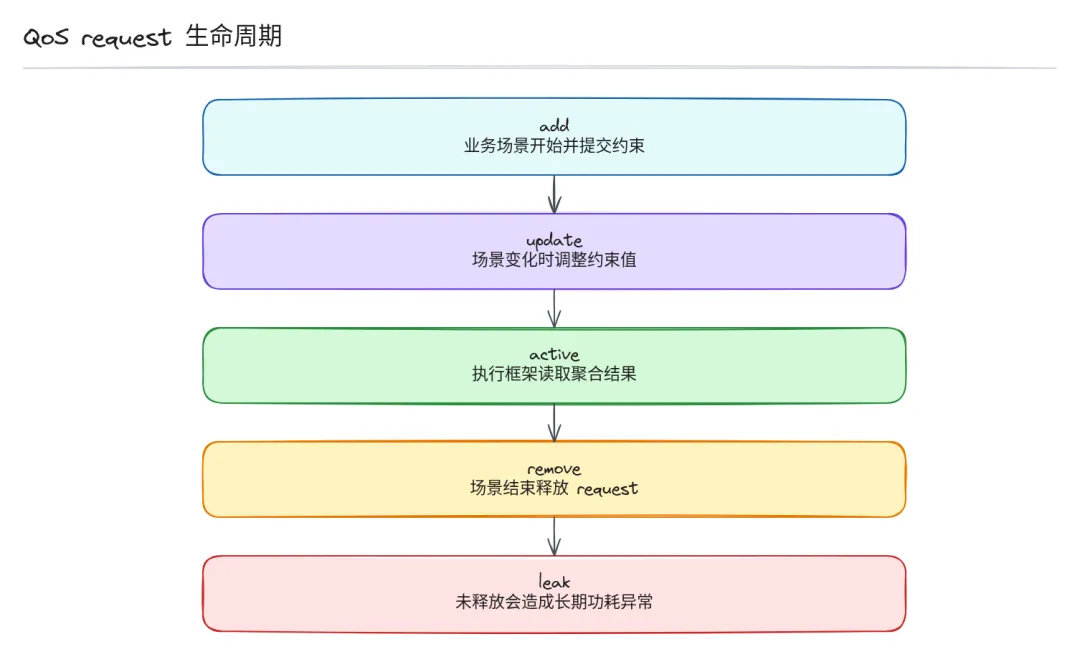
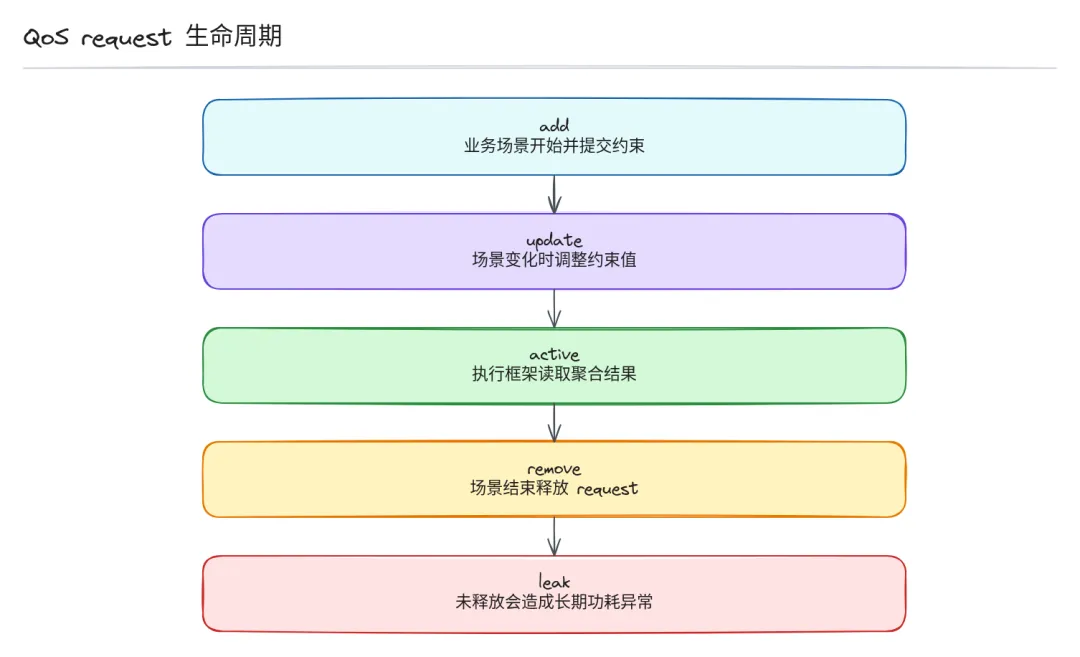
PM QoS 运行的重点是 request 生命周期。
- • add:表示场景开始。比如音频开始播放、相机开始预览、网络进入低延迟传输、显示链路进入高刷状态,驱动或用户态服务添加一条 QoS request,声明当前阶段不能接受太长延迟或者太低频率。
- • update:表示场景变化。同一个业务阶段内,约束可能从严格变宽松,也可能从宽松变严格。例如缓冲阶段要求低 latency,稳定播放阶段可以放宽;高帧率阶段需要较高最低频率,普通帧率阶段可以降低 request。
- • remove:表示场景结束。场景结束后必须移除 request,或者恢复默认值。fd 关闭、驱动 remove、runtime error unwind、业务停止路径都应该保证 request 被释放。
很多功耗问题不是没有 QoS 机制,而是 request 生命周期没有闭合。低功耗框架看到的只有当前聚合值,不知道这条 request 是否还对应着活跃场景。一个忘记释放的 CPU/DMA latency request,就足够让 CPUIdle 长期进不了深度状态。
RK3588 上 PM QoS 配置与约束理解
RK3588 作为 ARM 通用 SoC,PM QoS 配置主要落在 CPUIdle、Runtime PM、CPUFreq 三个路径,结合 device tree 和内核配置理解:
1. 系统级 CPU/DMA latency 约束配置
RK3588 内核源码中,CPU/DMA latency 约束入口默认打开,配置选项:
CONFIG_PM_QOS=y
CONFIG_PM_QOS_FLAGS=y
这个配置不需要改,默认 defconfig 已经打开。关键是用户态怎么加约束:
用户态程序可以通过 /dev/cpu_dma_latency 接口添加约束:
int fd = open("/dev/cpu_dma_latency", O_RDWR);
int latency = 100; // 单位:微秒,允许最大退出延迟 ≤ 100us
write(fd, &latency, sizeof(latency));
// 使用过程中保持 fd 打开,关闭 fd 自动移除 request
close(fd);
- • 理解:只要 fd 不关闭,这个 request 就一直生效,会排除所有 exit latency > 100us 的 CPUIdle 深度状态
- • RK3588 上音频驱动默认会在播放时添加这个约束,所以播放音频时 CPU 经常进不了深度 idle 是正常现象
2. 设备级 dev_pm_qos 约束配置
RK3588 每个 device 可以在 probe 阶段绑定 dev_pm_qos 请求,dts 里也能配置默认 resume latency:
&usb {
status = "okay";
qos-resume-latency-us = <500>; // 默认恢复延迟不超过 500us
};
内核驱动里动态添加:
dev_pm_qos_add_request(&dev->dev, &dev->qos_req,
DEV_PM_QOS_RESUME_LATENCY, 500);
- • 理解:Runtime PM 尝试 suspend 设备前,会比较当前聚合 resume latency 约束,如果驱动要求的 latency 比当前约束更严格,就不允许 suspend。
- • RK3588 上摄像头、USB、PCIe 设备常见这类约束,打开设备后就不让 Runtime PM 挂起,保证响应速度。
3. 频率约束 freq_qos 配置
RK3588 CPUFreq 对 freq_qos 支持默认打开,驱动可以添加 min/max 频率约束:
freq_qos_add_min_freq_request(policy, &data->qos_req, 1000000);
- • 理解:min request 会把最低频率抬高到 1GHz,即使负载很低,CPUFreq 也不能把频率降到 1GHz 以下,保证显示管线刷新延迟满足要求。
- • RK3588 显示驱动在高刷模式下常用这个约束,保证帧率稳定。
4. 约束条件怎么理解
PM QoS 约束本质是"不允许什么",不是"要求做什么":
- •
PM_QOS_CPU_DMA_LATENCY = 100:不允许 exit latency > 100us 的 idle 状态,不是要求所有 idle 状态延迟都到 100us - •
DEV_PM_QOS_RESUME_LATENCY = 50:不允许 resume latency > 50us 的 suspend,不是要求 resume 必须到 50us - •
freq_qos_min = 1000000:不允许频率 < 1GHz,不是要求频率必须稳定 1GHz
理解这个逻辑很重要:PM QoS 只是给执行框架画了一条不能越界的线,具体选什么动作还是执行框架决定。

总结
PM QoS 是低功耗路径里的约束管理框架。
它不负责省电动作,不负责选 idle 状态,不负责调频,也不负责 runtime suspend。它做的就是收集 request、计算聚合约束、向执行框架提供当前边界。
理解 PM QoS,可以抓三条线:
- • request 来源:谁提交了约束,是驱动、子系统,还是用户态进程。
- • constraint 聚合:多个 request 如何形成当前有效 latency 或者 frequency 边界。
- • 执行方读取:CPUIdle、Runtime PM、genpd、CPUFreq/devfreq 如何用这个边界裁剪低功耗动作。
PM QoS 是低功耗设计里"隔离变化"的经典设计:需求方只管声明约束,执行方只管读取边界,框架做聚合转发,双方不需要直接耦合。正是这个设计,让它能串联起系统中各个不相关的低功耗请求,成为功耗决策的公共约束入口。
在 RK3588 这类 ARM SoC 上,只要掌握 request 生命周期和约束语义,大部分奇怪的功耗问题就能找到原因:为什么 CPU 睡不深?为什么设备挂不起来?为什么频率降不下来?先看 PM QoS,大部分时候问题就在这里。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
