复杂度提升,系统为什么会从RTOS走到Linux?
- 2026-07-02 22:19:50

——RTOS解决的是运行秩序,Linux接住的是更复杂的系统生态
学完 RTOS 以后,很多人会有一个很自然的疑问:既然 RTOS 已经能多任务了,也有队列、信号量、互斥锁,还能跑协议、刷 UI、做低功耗,那为什么很多产品继续往上做,最后还是会走到嵌入式 Linux?
很多人一提 Linux,就直接扎进命令、驱动、设备树、Buildroot、Yocto,结果越学越碎。你命令会敲一些,驱动例程也能跟着改两行,但脑子里始终没有一张图:
系统为什么要从 RTOS 走到 Linux?Linux 到底接住了什么复杂度?
这里我们先把最底层的逻辑讲清楚:
RTOS 主要解决多任务运行秩序,Linux 解决的是复杂系统的资源管理、隔离、驱动生态和应用生态。
这句话听起来有点硬,下面一点点拆开。提示一下哦,这篇文章属于概念长文。
一、RTOS已经很强了,但它不是Linux
先别把 RTOS 看低了。RTOS 的价值非常明确:它让多个任务在一个 MCU 系统里有秩序地运行。谁先跑、谁等待、谁被唤醒、谁优先级更高、谁和谁通信、谁访问共享资源,这些以前靠你在裸机里手搓的运行规则,RTOS 都能帮你接住一大块。
所以很多产品用 RTOS 是完全合理的,比如电机控制器、传感器节点、小型人机界面、工业采集模块、电池管理系统。这些系统需要多任务协作,但整体资源、业务边界和外设复杂度还在一个可控范围内。
真正的问题出现在系统继续长大以后。你可能开始需要复杂文件系统、网络协议栈、安全通信、USB、摄像头、显示、音频、多进程应用、动态升级,以及一大堆成熟开源组件。到这个阶段,系统的问题就不只是“几个任务怎么调度”了,而是它开始像一个小型计算平台。
换个说法:
RTOS 更像给固件装了一个靠谱的运行秩序,Linux 更像给设备装了一套完整的平台底座。
这就是两者最大的分界。
二、复杂度到底提升在哪里
从 RTOS 到 Linux,不是简单地说任务数量变多了。任务多,RTOS 也能管。真正的变化是复杂度类型变了。
你可以先看这张表:
这张表不用背,只要抓住一个感觉: RTOS 解决的是“固件内部怎么有秩序地跑”,Linux 解决的是“一个复杂设备怎么像系统一样组织起来”。
RTOS 里你通常把整个固件一起编译、一起烧录,任务之间虽然有边界,但大多还是共享同一片地址空间。
Linux 里,应用可以是一个个独立进程,驱动在内核里,应用在用户态,文件系统、网络、权限、进程管理都变成了系统级能力。
这不是“高级一点”的问题,而是系统形态已经变了。
三、第一道分水岭:内存保护
RTOS 项目里,多个任务通常共享同一片地址空间。这个模型很直接,效率也高,但代价是边界不够硬。一个任务如果指针写飞了,可能直接踩到别的任务、全局变量、堆、栈。系统不会天然拦住你。
所以你会看到很多 RTOS 里的怪问题:一个任务栈溢出,结果另一个任务异常;一个数组越界,系统不是马上死,而是过一会儿才跑飞;一个野指针,把别的模块状态悄悄改坏了。你调半天,最后发现问题根本不在出错的那个任务里。
Linux 在这件事上最大的变化,是引入了虚拟内存和进程隔离。这里不用一上来就把 MMU 页表讲得很吓人,你可以先这么理解:
每个进程都以为自己有一整套地址空间,内核在背后负责把它映射到真实物理内存。
这样做的好处是,一个普通应用进程崩了,通常不会直接把整个系统踩死。它可能会段错误退出,也就是我们常说的 Segmentation fault,但内核、其他进程、系统服务大概率还在。
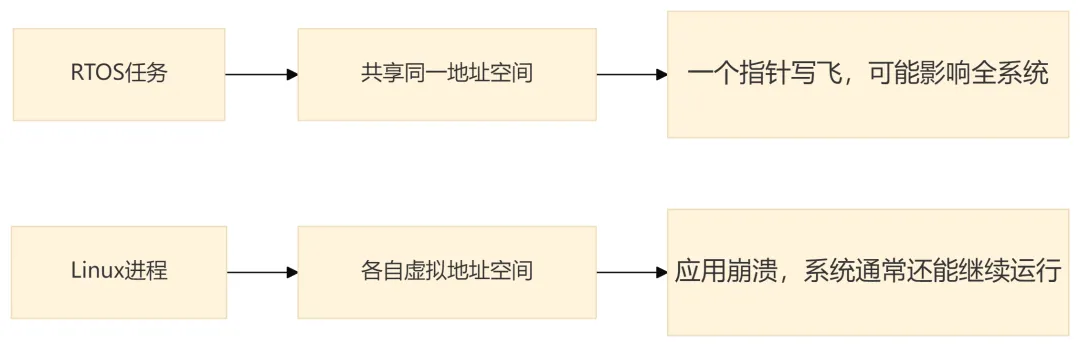
这就是复杂系统很需要 Linux 的原因之一。不是 Linux 永远不会崩,而是它给了应用之间更硬的隔离边界。
四、第二道分水岭:文件系统不再只是“存几个参数”
在 MCU + RTOS 里,很多文件需求其实不重。你可能只是保存配置、记录少量日志、存几段校准数据。这种情况下,Flash 模拟 EEPROM、小型文件系统、KV 存储都能解决问题。
但设备复杂以后,文件系统就不再是“存几个参数”的工具,而会变成系统基础设施。配置文件、日志文件、数据缓存、OTA 升级包、证书密钥、Web 页面、数据库,这些东西一多,你需要的就不只是“能写 Flash”,而是路径、权限、挂载、缓存、设备文件、多进程访问、异常恢复这一整套文件系统语义。
Linux 里有个非常重要的概念叫 VFS,也就是 Virtual File System,虚拟文件系统层。它的作用不是让你多背一个名词,而是把不同类型的资源统一到类似“文件”的访问模型里。
所以你会看到 Linux 里很多东西都像文件:
普通文件在文件系统里 设备节点在 /dev内核信息在 /proc设备和驱动信息在 /sys网络 socket 也能被文件描述符管理
这就是“一切皆文件”背后的意思。它不是说所有东西真的都是磁盘文件,而是 Linux 尽量把很多系统资源抽象成“可以打开、读写、控制”的对象。对应用开发来说,这个统一模型非常值钱。
五、第三道分水岭:驱动不再只是寄存器封装
裸机或 RTOS 里的驱动,很多时候就是初始化外设、配置寄存器、提供 Read/Write 函数,然后给业务层调用。这种方式很直接,也很好理解。
但 Linux 驱动不是简单把寄存器封装一下。它要接入内核框架。
比如你写一个 I2C 设备驱动,它不只是把 I2C 寄存器配置好,还要接入 Linux 的 I2C 子系统。你写一个按键驱动,不是简单读 GPIO 就完事,更常见的做法是接入 input 子系统,让上层应用看到标准输入事件。摄像头、显示、网络,也都有自己的框架,比如 V4L2、DRM、network subsystem。
这就是 Linux 驱动模型的价值:
硬件细节留在驱动里,应用看到统一接口。
用生活化一点的比喻,裸机驱动像你直接去仓库找货,知道每个货架在哪里;Linux 驱动更像把货物接入一个标准物流系统,上层不关心仓库布局,只管按统一规则下单、收货。
这也是为什么 Linux 驱动刚学起来会觉得绕。它不是为了故意复杂,而是为了让硬件进入整个系统生态。
六、第四道分水岭:应用生态
RTOS 项目通常是一个固件整体。业务、驱动、协议、任务一起编译,一起烧录。你当然也可以做模块化,但整体形态还是“一个固件”。
Linux 设备就更像一台小电脑。它可以有系统服务、后台进程、命令行工具、Shell 脚本、Python/C++/Go 应用、Web 服务、数据库、网络工具。应用可以单独更新,日志可以用系统服务收集,网络问题可以抓包,进程可以单独重启,甚至远程部署和运维。
这就是 Linux 最大的吸引力之一:
它不是只给你一个内核,而是给你一整套软件生态。
所以当你的产品开始需要复杂联网、Web 配置、视频音频、数据库、远程升级、远程排查时,继续用 RTOS 硬扛就会很累。不是不能做,而是很多东西你要自己补,补到最后,你可能又在造一个很不完整的“小 Linux”。
七、那Linux是不是就比RTOS更好?
不是。这个坑一定要避开。
Linux 有 Linux 的代价,而且一点也不小:
所以千万别把 Linux 当成“高级版 RTOS”。一个电机控制闭环,如果要几十微秒级稳定响应,你硬上普通 Linux,未必是好主意。一个低成本传感器节点,只有几十 KB RAM,也没必要谈 Linux。
Linux 更适合资源更充足、业务更复杂、生态依赖更多、需要文件系统和网络能力、需要应用和驱动分层、需要长期维护和远程升级的设备。
一句话:RTOS适合把固件跑稳,Linux适合把复杂设备管起来。
八、从RTOS到Linux,学习重点也要变
如果你从 RTOS 过来学 Linux,建议别一开始就冲命令大全。命令当然要学,但更重要的是先建立系统全景图。
一块 Linux 板子上电以后,大概会经历这条链路:
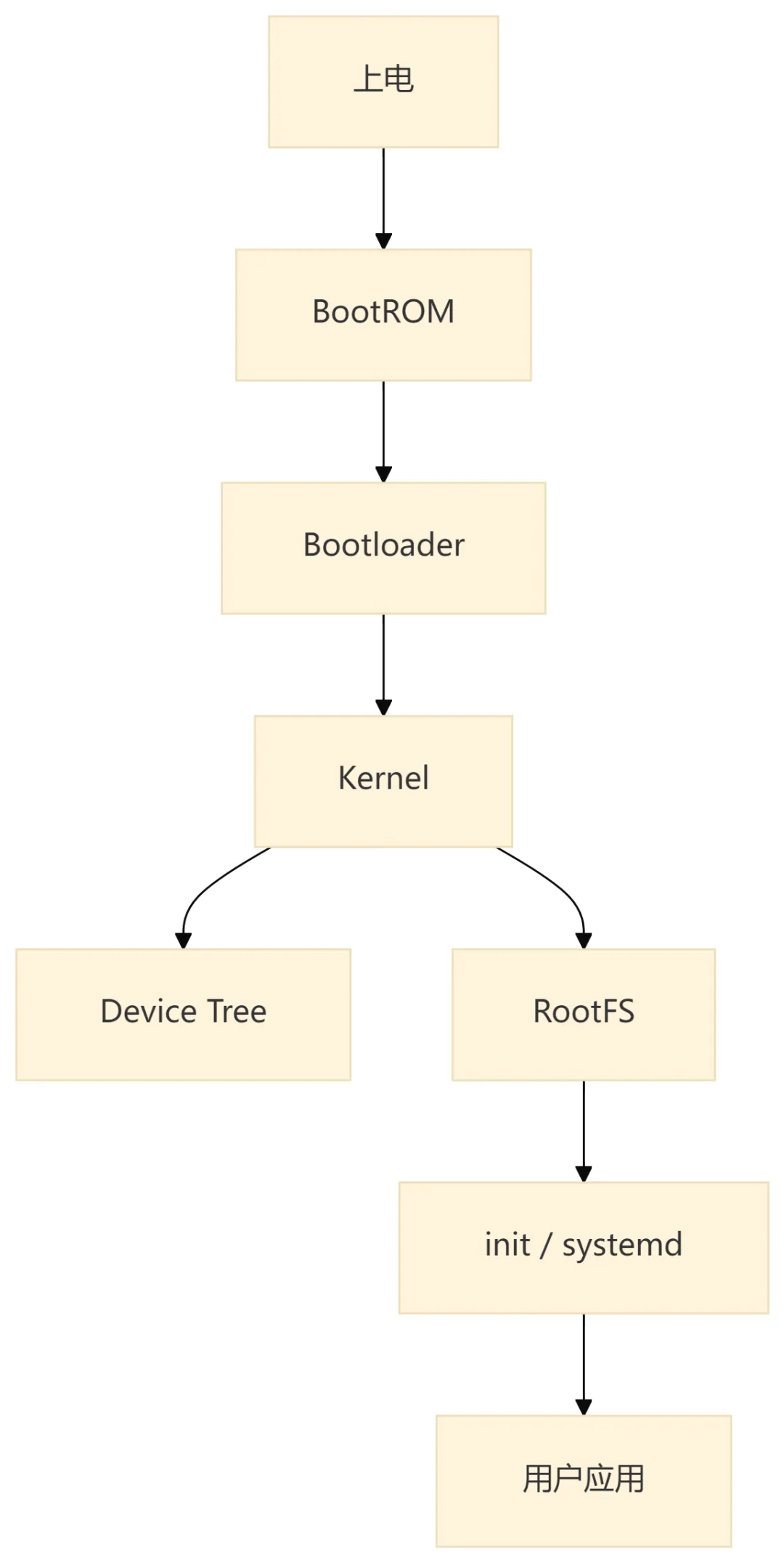
这里面每个词后面都能展开一大篇,但刚开始你只需要知道它们分别管什么:
BootROM是芯片上电后最早执行的固化代码Bootloader负责初始化关键硬件、加载内核,常见的是 U-BootKernel是 Linux 内核,负责进程、内存、驱动、文件系统、网络等核心能力Device Tree是设备树,用来描述板子硬件,让内核知道外设怎么连RootFS是根文件系统,里面放用户态程序、库、配置、脚本init/systemd负责把用户空间拉起来,启动各种服务
这张图先立住,后面学设备树、驱动、文件系统、Buildroot、Yocto,就不会全是散点。
九、最后总结一下
从 RTOS 到 Linux,不是因为系统突然“高级”了,而是复杂度类型变了。
RTOS 解决的是多任务、等待唤醒、任务通信、优先级和资源同步。Linux 接住的是进程隔离、虚拟内存、文件系统、驱动模型、网络能力、应用生态和系统级维护能力。
可以这么记:
RTOS让固件有运行秩序,Linux让设备具备系统平台能力。
相关文章
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Day 2: 第一个Python程序与交互模式
- 别再只会用 cron:Linux systemd Timer 定时任务实战详解
- 5个Python框架,帮你甩开90%的AI初学者
- PS5 Linux 即将最高支持到7.61
- 每日一问|同样是 Linux 权限,为什么大厂都在用 ACL?
- Linux LVM(四):快照
- 运维干货:别只会rm删日志!Linux truncate命令实战用法,线上清理零故障
- Python教程(22)turtle库综合案例:谁是最快的龟?(下)
- python当前最流行的编程语言
- Linux删除高阶技巧:如何删除“除指定文件外”的所有文件?
