LinuxCNC 是一套专门用于数控机床(CNC)、机器人和运动控制的开源控制平台。它并不是传统意义上的 Linux 桌面发行版,而是由实时 Linux 系统 + CNC 控制软件 + G 代码解释器 + 运动控制框架组成的一体化解决方案。
借助 LinuxCNC,一台普通 PC 就可以成为专业的运动控制器,可用于:
它被广泛应用于工业制造、科研院所、职业教育以及 Maker 社区,是目前最成熟的开源 CNC 控制平台之一。
📌 系统信息
官方网站:https://linuxcnc.org
📌 系统类型: 开源实时运动控制平台
📌 官方安装镜像: Debian + LinuxCNC
📌 实时内核: PREEMPT_RT(官方推荐),部分旧版本支持 RTAI
📌 适用场景:
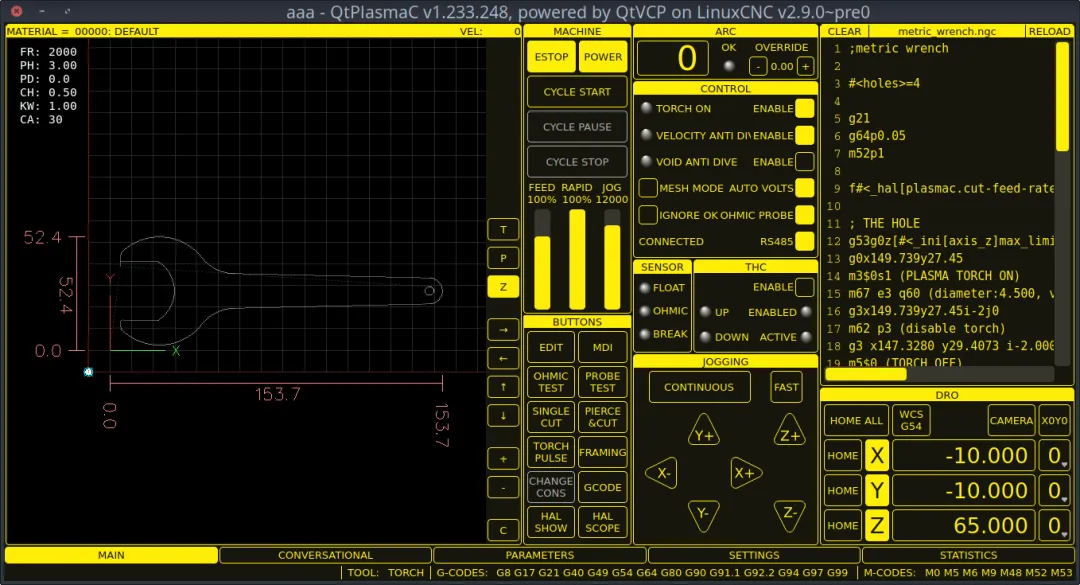
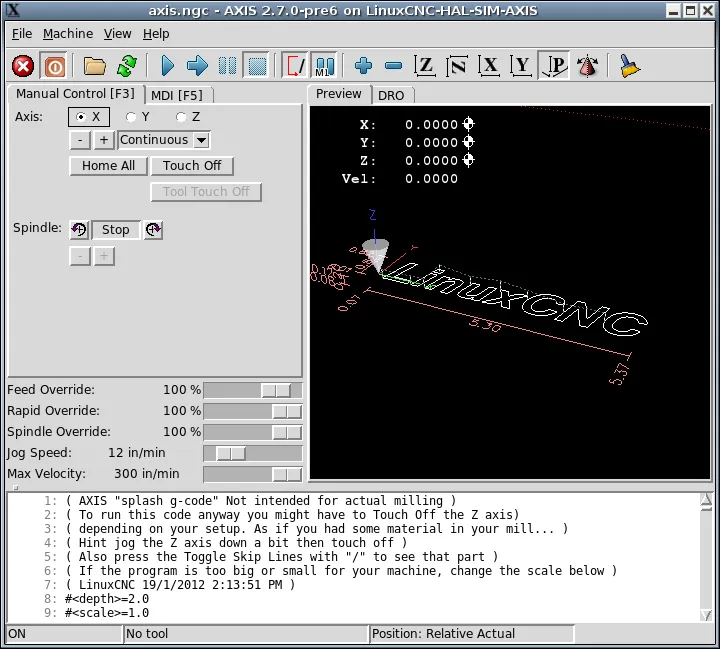
🖥️ 界面预览
LinuxCNC 提供多种图形界面,可根据设备类型自由选择。
常见界面包括:
- Axis:经典界面,适合铣床、车床等传统 CNC。
- Gmoccapy:更现代的操作界面,按钮较大,适合触摸屏。
- QtDragon:基于 Qt 的现代界面,适合新设备和定制化应用。
这些界面通常提供:
整体更偏向工业控制软件,而不是普通桌面应用。
📜 项目背景
LinuxCNC 的前身是 Enhanced Machine Controller(EMC) 项目,由美国国家航空航天局(NASA)资助开发,用于实时运动控制研究。
随后项目逐渐发展成为独立的开源社区项目,并更名为 LinuxCNC。
经过二十多年的持续发展,它已经成为全球最成熟、应用最广泛的开源 CNC 控制平台之一。
🎯 核心特色亮点
⚡ 1. 实时运动控制
LinuxCNC 最大的优势就是实时性。
依托实时 Linux 内核,它能够实现:
对于数控加工而言,这种确定性的实时控制至关重要。
🛠️ 2. 支持丰富的运动控制设备
LinuxCNC 不局限于传统 CNC,可用于:
具有很高的灵活性。
🔌 3. HAL(Hardware Abstraction Layer)硬件抽象层
HAL 是 LinuxCNC 最具特色的功能之一。
它允许用户自由连接:
用户可以像搭积木一样构建自己的控制逻辑,而无需修改 LinuxCNC 核心代码。
🌐 4. 丰富的硬件支持
LinuxCNC 支持多种运动控制接口,例如:
其中,Mesa FPGA 控制卡是 LinuxCNC 社区应用最广泛的硬件方案之一。
📄 5. 完整的 G 代码支持
LinuxCNC 支持大量标准 G/M 代码,包括:
能够兼容多数 CAM 软件生成的标准 G 代码,例如:
🧩 技术特性总览
| |
|---|
| |
| |
| |
| Axis、Gmoccapy、QtDragon、QtPyVCP |
| Mesa、并口、Modbus、EtherCAT(扩展支持) |
| |
| |
💻 系统配置要求
LinuxCNC 对计算性能要求并不高,但对实时性能要求较高。
| |
|---|
| |
| Intel Core i5 / AMD Ryzen、4GB RAM、SSD |
| |
| |
👥 适用人群
LinuxCNC 特别适合:
⚠️ 注意事项
- 学习曲线相对较高,需要理解 G 代码、HAL、INI 配置等概念。
- 对实时性能要求较高,正式生产环境建议先进行延迟测试。
📌 总结
LinuxCNC 是目前最成熟的开源 CNC 控制平台之一,它将实时 Linux、运动控制、G 代码解释和硬件抽象层整合为统一系统,为数控加工、机器人和自动化设备提供可靠、灵活且高度可定制的控制方案。
无论是工业生产、高校教学,还是 DIY 数控设备,它都能提供专业级的运动控制能力。
一句话概括:
LinuxCNC = 实时 Linux + CNC 控制平台 + G 代码解释器 + HAL 硬件抽象层,是开源数控与运动控制领域最具代表性的解决方案之一。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
