在伺服运动控制中,“扭矩限幅” 是个既基础又关键的功能 —— 既能防止负载过载,也能避免机构冲击。今天就以 S200 伺服驱动器为例,从PLC 代码逻辑到实际调试效果,带你搞懂转矩限幅怎么用。
一、先搞懂:S200 只用105报文转矩限幅的核心逻辑
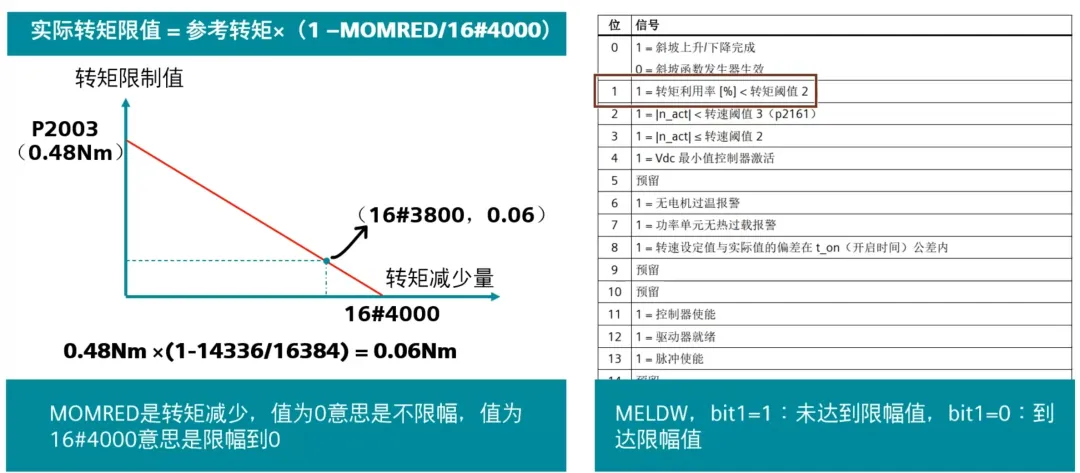
S200 的转矩限幅是通过 **“转矩减少值(MOMRED)”** 实现的,核心公式是:实际转矩限制 = 参考转矩 × (1 - MOMRED/16384)(16384 是 MOMRED 的最大值,对应 “限幅到 0”;值为 0 则不限幅)
二、PLC 里怎么写?看这 2 行关键代码
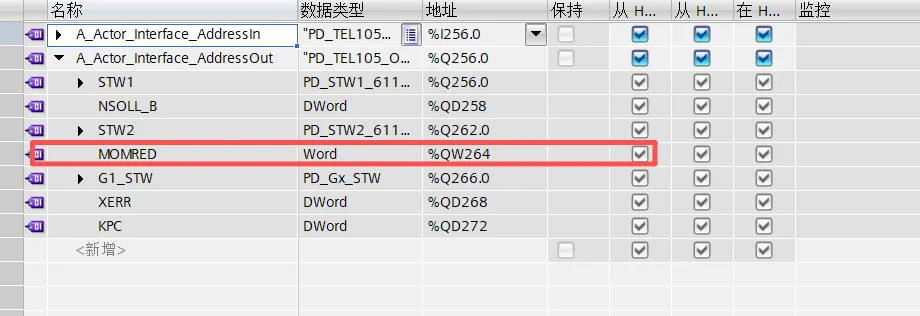
以博途环境为例,我们通过 DB 块和接口区实现转矩限幅的逻辑控制:
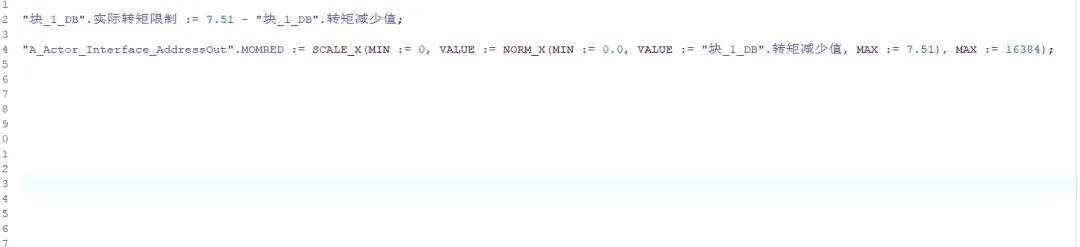
第 1 行:计算
- 实际要限制的转矩值(这里以 7.51Nm P2003为基础值,减去 “转矩减少值” 得到目标限幅值);
- 第 2 行:通过
NORM_X+SCALE_X,把 “转矩减少值”归一化 + 缩放成 S200 能识别的 MOMRED(Word 类型,范围 0~16384)。
三、实测效果:从监控到 Trace,看扭矩怎么 “被限住”
我们直接看现场调试的实际数据:
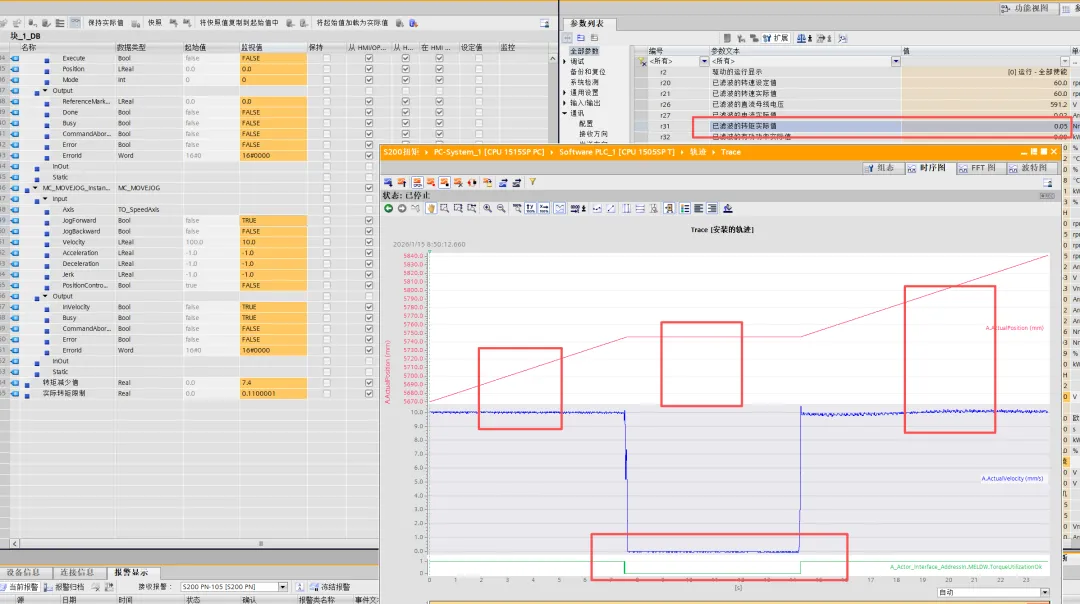
1. 变量监控:参数是怎么联动的?
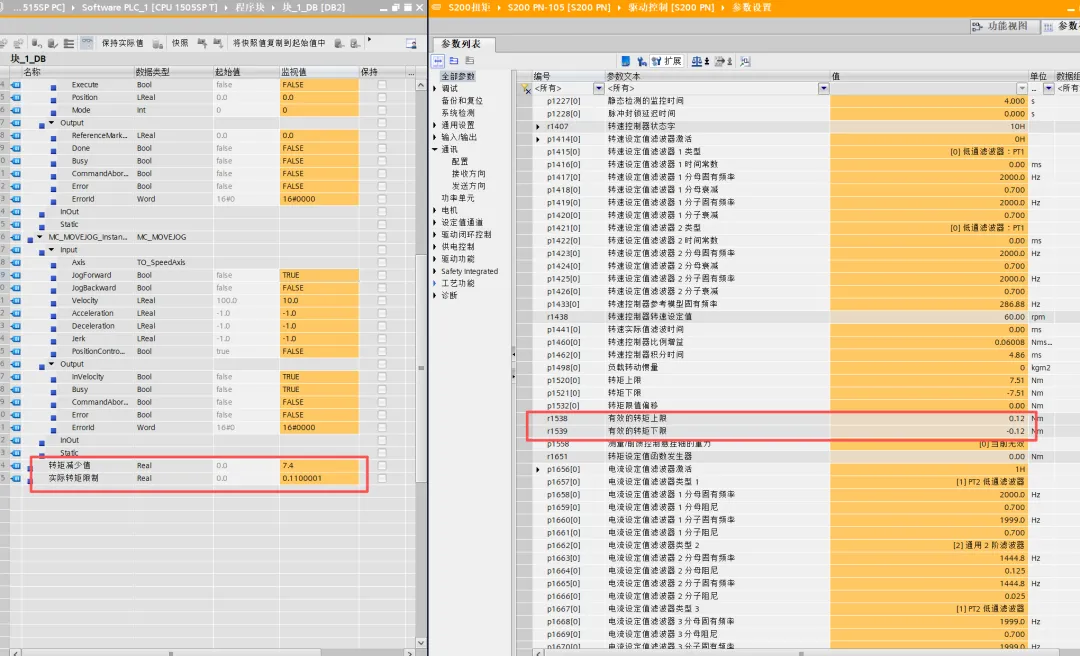
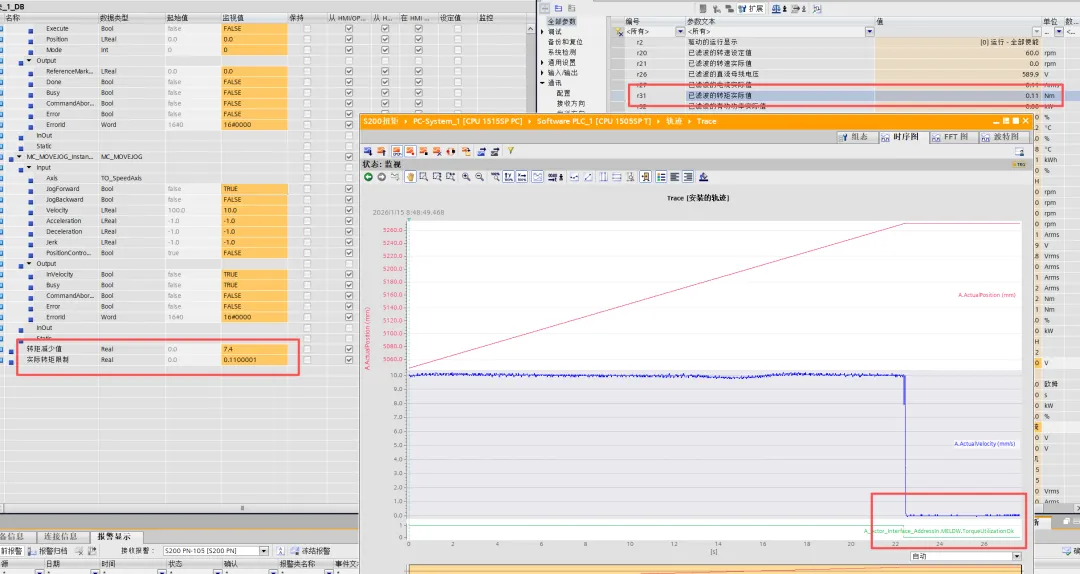
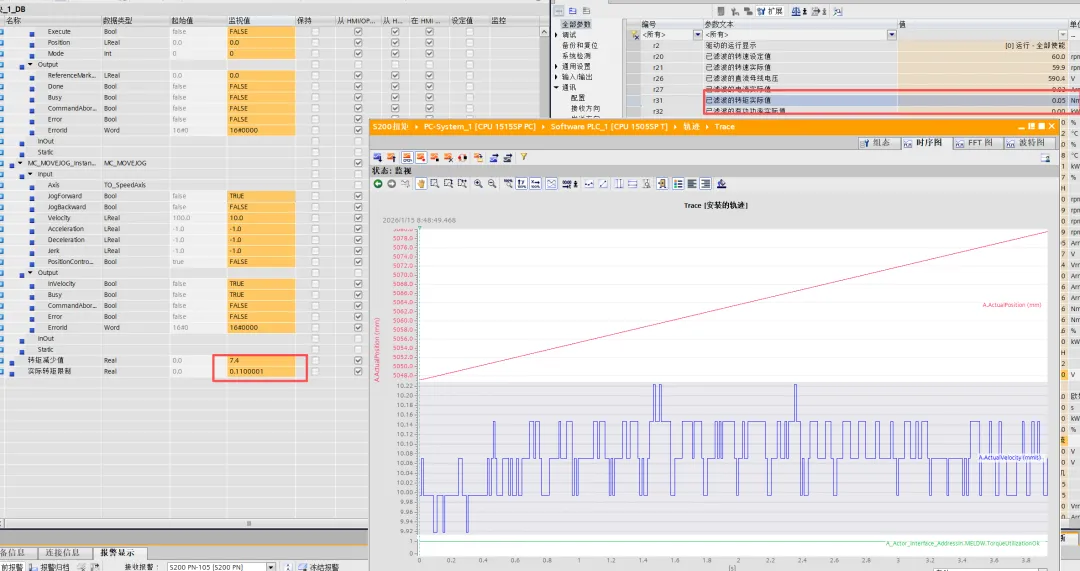
在 PLC 的 DB 块中,我们设置 “转矩减少值 = 7.4”,则:实际转矩限制 = 7.51 - 7.4 = 0.11Nm同时 S200 驱动器的 **r1532(有效转矩上限)** 也同步显示为 0.11Nm,说明限幅参数已生效。
2. Trace 曲线:限幅后扭矩真的 “稳了”
看 Trace 轨迹图:
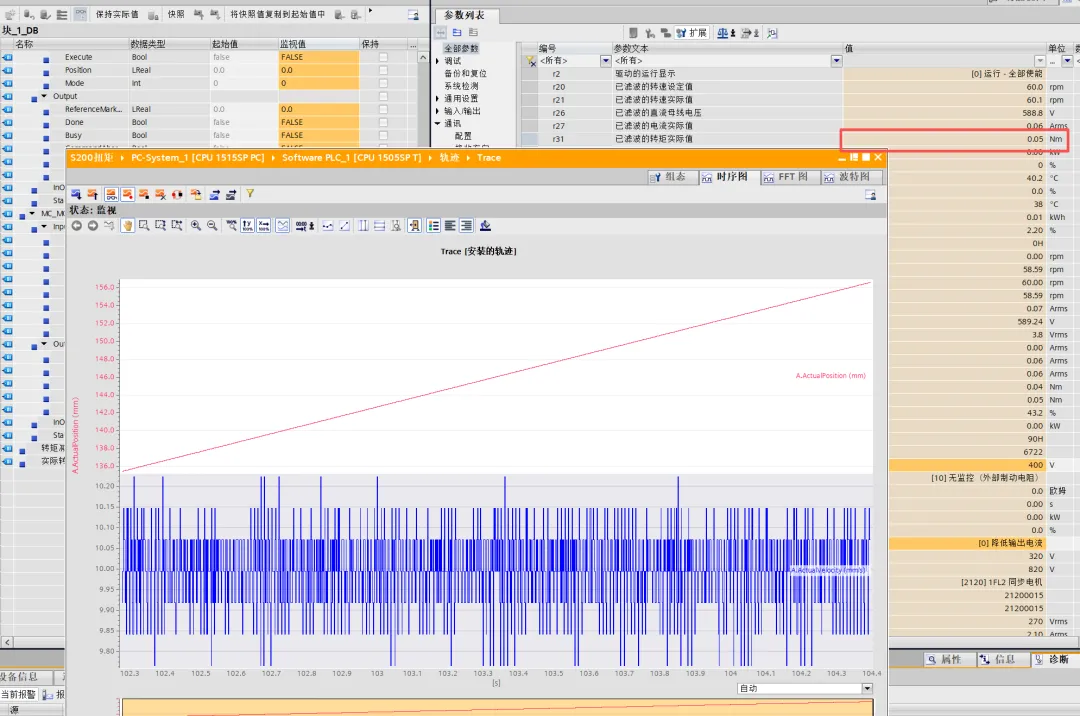
空载运行时扭矩为0.05
- 手握住电机轴让电机转动实际扭矩达到设定扭矩0.11
- 蓝色曲线(实际速度):没有因扭矩突变产生的 “毛刺”;
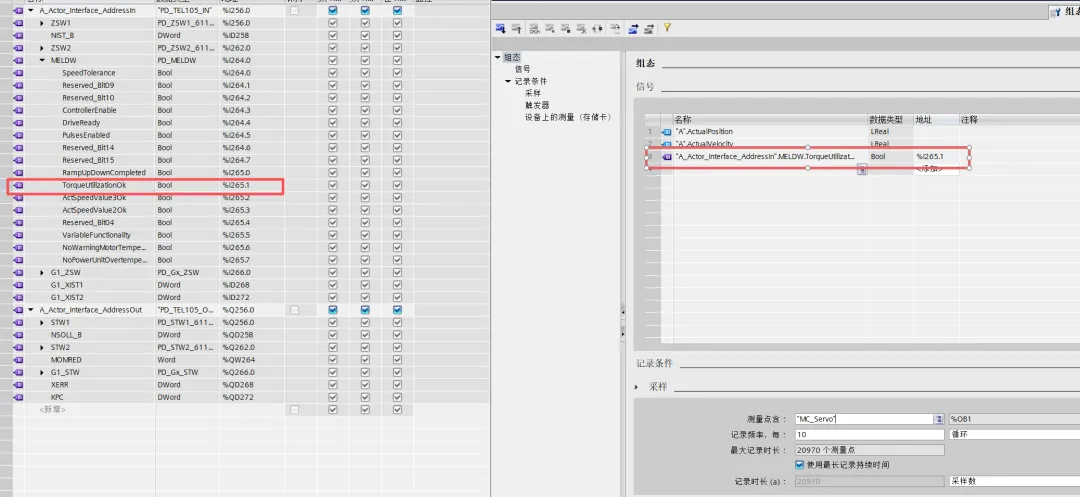
- 绿色曲线(TorqueUtilizationOk):一旦扭矩触达限幅值,该信号会从 1 变为 0,直观反馈限幅状态。
四、避坑提醒:2 个调试小细节
- MOMRED 的 “缩放范围” 别错:必须把实际扭矩值(比如 0~7.51Nm)缩放到 0~16384 的 Word 范围,否则驱动器识别不到正确的限幅值;
- 用 Trace 看 “实际扭矩”:调试时一定要监控 S200 的
r31(已滤波的转矩实际值),避免只看 PLC 变量、忽略驱动器实际输出。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
