车轮上的Linux:揭秘车载Camera驱动开发的核心技术与框架①-Overview
- 2026-07-04 15:55:48
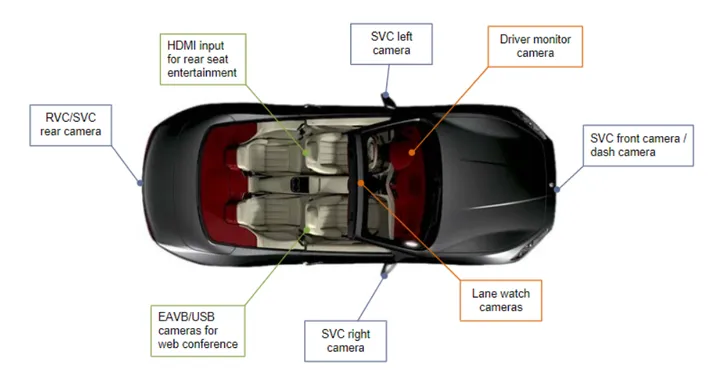
车载Camera在整车上的分布
摄像头位置(英文标注) | 中文名称与功能 | 主要用户场景 | 相机类型 |
|---|---|---|---|
RVC/SVC rear camera | 后视/全景后摄像头:提供车辆后方视野,用于倒车影像及全景环视系统的后部拼接 | 倒车入库、狭窄道路倒车、触发全景环视时提供后方视角 | RGB相机 |
SVC front camera / dash camera | 前视/行车记录摄像头:提供车辆前方视野,用于行车记录、前方碰撞预警、车道识别,并作为全景环视的前部视角 | 行车记录、前向碰撞预警、车道保持辅助、全景环视前方视角 | RBG+IR(夜视增强) |
Lane watch cameras | 车道监测摄像头:通常指专用于识别车道线的摄像头,是车道保持辅助系统的核心传感器 | 高速公路或快速路行驶时,辅助车辆保持在车道中央 | RBG 高HRD |
Driver monitor camera | 驾驶员监控摄像头:实时监测驾驶员的面部特征、视线方向、头部姿态等,用于判断驾驶员是否分心、疲劳 | 长途驾驶、开启自动驾驶辅助功能时,确保驾驶员状态可接管车辆 | IR相机 |
EAVB/USB cameras for web conference | 视频会议摄像头:用于车内视频通话、远程会议的后排娱乐系统输入设备 | 车内视频会议、远程办公、家人朋友车内视频通话 | RGB相机(网络摄像头) |
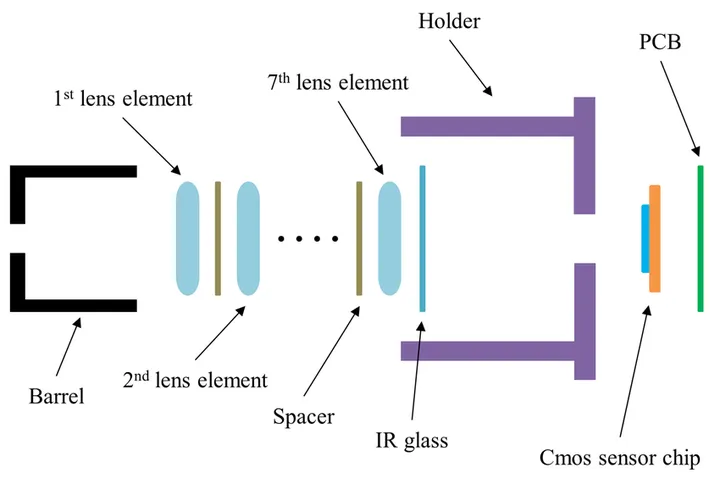
车载Camera的主要部件
除了光学部件,需要Device Driver(硬件驱动层)提供支持的相机组件或者设备有:
Camera Modules (摄像头模组):
Sensor驱动 (如Ov5640):图像源头,控制图像传感器,负责输出最原始的RAW图像数据;
Actuator驱动 (对焦音圈马达 Voice Coil):控制镜头进行自动对焦;
Flash驱动 (闪光灯):控制补光灯;
Camera Interface (摄像头接口):
MIPI/CSI/CCI:数据传输的“高速公路”和“控制总线”
MIPI CSI是高速图像数据传输接口;
CCI (通常指I2C) 是控制总线,用于配置Sensor、马达等;
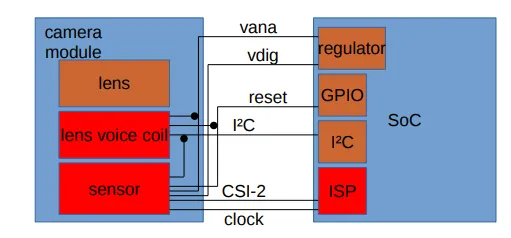
Image Signal Processor (图像信号处理器):
ISP驱动:图像的“加工厂”,负责对Sensor的原始RAW数据进行降噪、色彩插值、白平衡、伽马校正等一系列处理,输出高质量的YUV或RGB图像;
3A STAT是ISP实现自动对焦(AF)、自动曝光(AE)、自动白平衡(AWB)所需的统计信息收集模块;
需要了解ISP算法,请戳:
自动驾驶如何“看清”世界?解读车载Camera图像处理中不可或缺的Demosaic算法
车载Camera如何“掰直”弯曲的世界?镜头畸变校正算法模型
VIPP (视频图像后处理器):
SCALER (缩放器):对ISP输出的图像进行缩放,以适配不同显示或编码需求;
OSD (屏上显示):在图像上叠加图形或文字等水印;
车载Camera Device 驱动的数据流
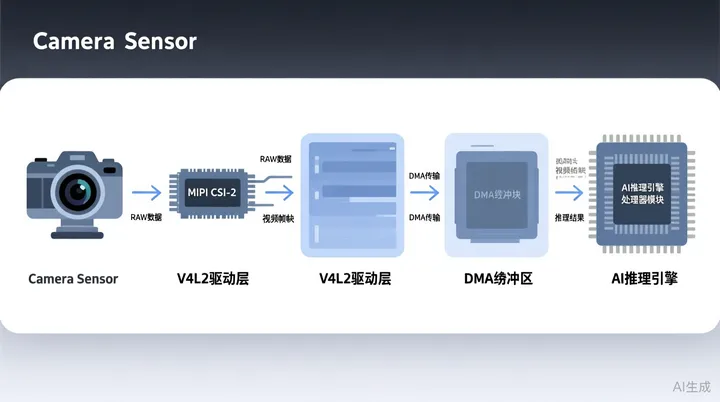
Camera Sensor捕获的原始数据RAW Data(Bayer域),通过Linux V4L2驱动层(后续专题会单独介绍),经过ISP算法处理之后还原为RGB或者YUV color format,写入到DRAM buffer中,并且直接由DMA buffer进行缓冲(减少CPU的干预),再经过适当的AI/ML(比如:TensorFlow / PyTorch AI框架)的推理,比如DMS的疲劳,酒精检测推理,最后输出业务逻辑。
Camera Sensor → MIPI CSI-2 → V4L2驱动层 → DMA缓冲区 → AI推理引擎
下一篇会专门介绍,Linux的V4L2的开发框架Camera 的device tree。
参考文献

