STM32"零代码”编程GPIO总结
- 2026-06-30 20:38:57
STM32"零代码”编程GPIO总结点亮一个LED 从点亮一个LED分析C语言程序的基本组成 STM32"零代码”实现LED流水灯 STM32"零代码”实现按键控制LED流水灯 STM32"零代码”实现按键控制LED流水灯(中断方式) 在单片机编程中,AI 大模型虽能高效生成具备基础可用性的代码框架,满足表层开发需求,但想要真正驾驭代码、实现优化调试与深度开发,开发者仍需深入理解并吃透单片机的硬件架构与底层工作原理,才能真正掌握代码运行逻辑,完成高质量的开发工作。 前文中,通过几个例子,简单实现了从单片机控制一个LED灯、到控制多个LED流水灯、再到使用按键(查询方式和中断方式)控制LED流水灯工作模式,逐步覆盖了单片机GPIO在日常使用中的一些基本功能。 今天借STM32F1这个系列单片机,就单片机GPIO内部结构做个简单总结。
STM32F1系列单片机每个GPI/O端口有 根据数据手册中列出的每个I/O端口的特定硬件特征, GPIO端口的每个位可以由软件分别配置成多种模式。 输入模式: 输出模式: 其他功能: 前边例程中,按键的使用即使用了其输入模式,输出控制LED即使用了输出模式。 另外的其他功能,涉及单片机内部其他功能,这里暂时不展开讲。 每个I/O端口位(例如PA02,PA代表一组端口,02代表其中的一位(一个引脚))可以自由编程,但I/0端口寄存器必须按32位字被访问(不允许半字或字节访问)。(意思是虽然可以每个引脚独立编程,设置其功能,但是修改的时候需要按照整个寄存器统一修改,如果要修改其中的某个引脚,可以先读取寄存器的值,然后将要修改的位修改后,再将修改后的值整体写入该寄存器) GPIOx_BSRR和GPIOx_BRR寄存器允许对任何GPIO寄存器的读/更改的独立访问;这样,在读和更改访问之间产生IRQ时不会发生危险。
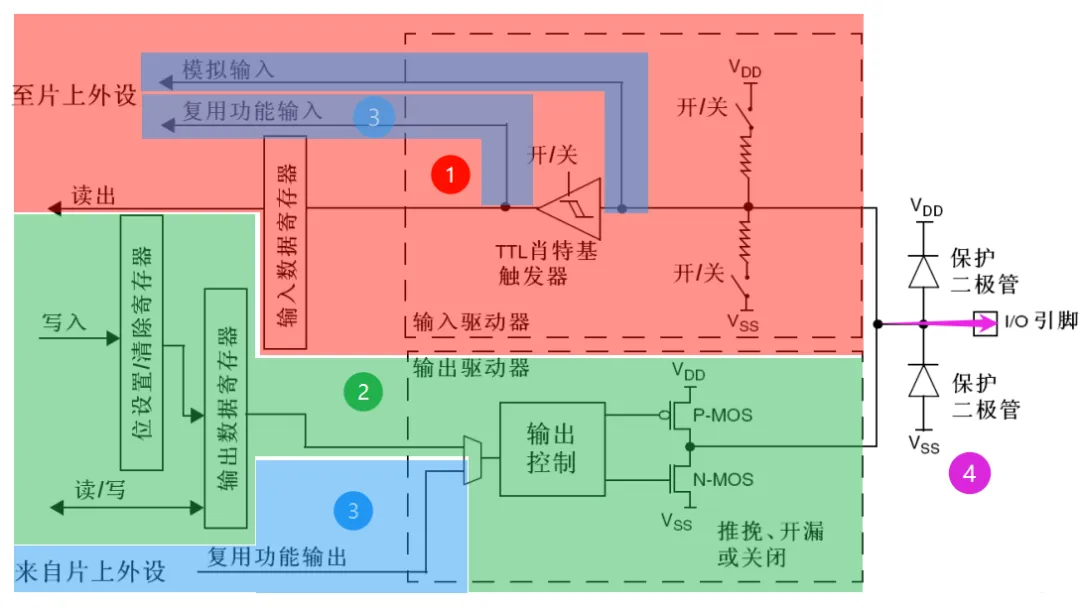
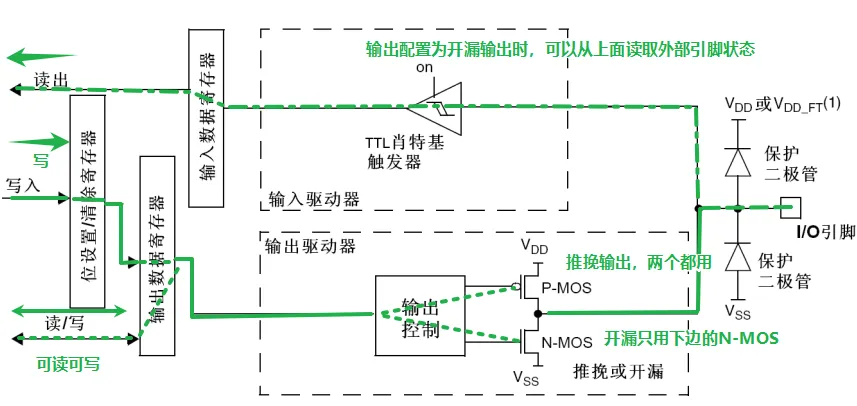
上图中④为芯片连接外部引脚部分。 ①为该引脚作为GPIO输入使用时的内部功能框图 ②为该引脚作为GPIO输出使用时的内部功能框图 ③为芯片内部功能其它外设功能,比如检测外部模拟量(电压)、与其它传感器通信、输出内容显示到液晶屏幕或者OLED屏上等等,需要使用到ADC、IIC、SPI、UART等,这些和GPIO一起,都属于单片机内部的功能模块,一般称作外设。 在后续的例子中,会逐步学习单片机的各种外设功能。 对GPIO进行输入和输出配置的初始化过程就是对功能框图中不同位置的“开关”进行打开和关闭的过程。 输出数据,即使用代码,将数据写入位设置/清除寄存器和输出数据寄存器的过程。 输入数据,就是从输入数据寄存器读出内容的过程。而输入数据寄存器会根据触发器输出内容及时更新,触发器的输入就来自外部引脚。
当配置为GPIO输入时,内部框图如下: 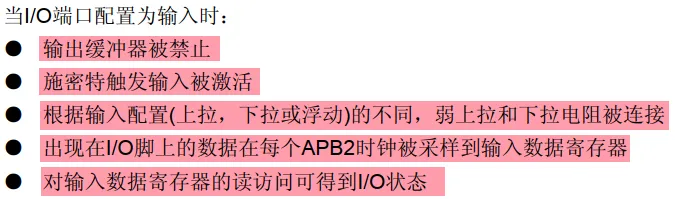
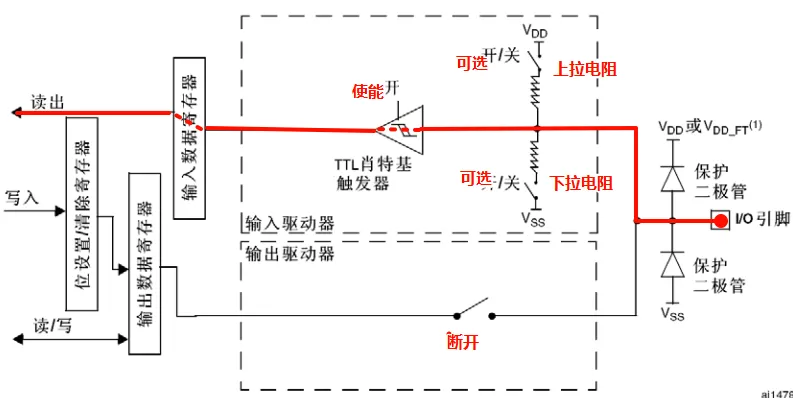
当配置为输出时,内部框图如下: 
GPIO相关寄存器 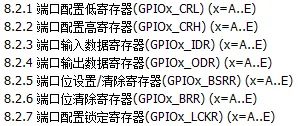
这里以端口配置低寄存器(GPIOx_CRL和GPIOx_CRH) 为例,其中的x代表A、B、C、D、E...这里的字母因芯片引脚多少而异,每一组端口都有该组寄存器,通过两个寄存器设置该组端口每个引脚的输入、输出功能。 其中GPIOx_CRL负责控制每组引脚的低8位,GPIOx_CRH负责控制每组引脚的高8位。 下图是GPIOx_CRL寄存器32个位的每一个位的功能。 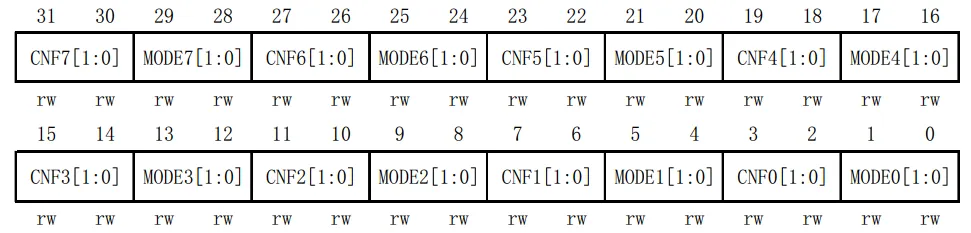
这里以[31:30] CNFy[1:0]为例(y代表引脚编号,从0~7),手册中有该两个引脚的参数说明: 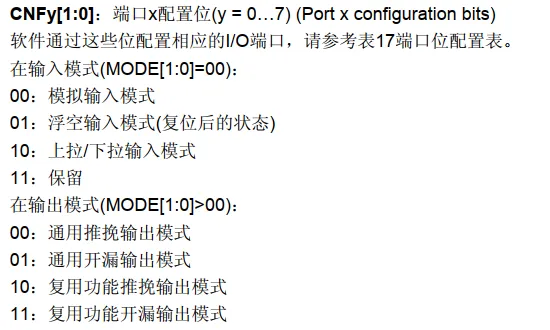
再举一个例子:端口输入数据寄存器(GPIOx_IDR) 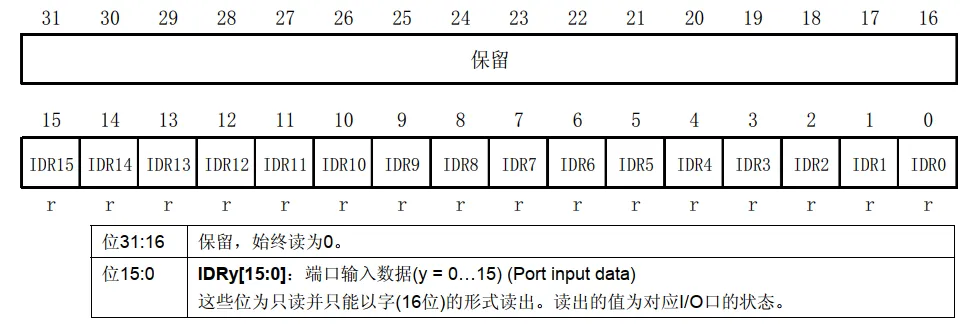
0~15位,每一位对应一个引脚,比如PA0、PA12、PE3... 保留,代表未使用。 更具体的功能,大家可以阅读《STM32F1中文参考手册_V10》。 首先,HAL库什么? HAL库中有关GPIO的操作函数: 回头再看前面的例程,比如,GPIO初始化函数: 也没有那么复杂吧...
点击文末“阅读原文”,可以直接打开代码仓库,代码仓库中有 合集中所有项目的源码,《STM32F1中文手册》、《cortex-M3权威指南》,也会随后上传到代码仓库中。
一、 STM32F1系列单片机GPIO功能描述
两个32位配置寄存器(GPIOx_CRL, GPIOx_CRH) 两个32位数据寄存器(GPIOx_IDR和GPIOx_ODR) 一个32位置位/复位寄存器(GPIOx_BSRR) 一个16位复位寄存器(GPIOx_BRR) 一个32位锁定寄存器(GPIOx_LCKR)
输入浮空 输入上拉 输入下拉
开漏输出 推挽式输出
模拟输入 推挽式复用功能 开漏复用功能
二、 STM32F1系列单片机GPIO结构框图
三、 GPIO相关的寄存器
四、 HAL库函数
STM32 HAL 库(Hardware Abstraction Layer,硬件抽象层)是 ST 公司(意法半导体)为旗下 STM32 系列单片机开发的官方底层驱动库,而 HAL 库函数就是这个库中封装好的、供开发者调用的标准化函数。简单来说:用户不用再直接操作单片机底层的寄存器(比如写GPIOA->ODR |= (1<<5)来控制引脚);只需调用 HAL 库提供的函数(比如HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET)),就能实现对 GPIO、定时器、串口等外设的控制;HAL 库相当于在 “底层寄存器” 和 “开发者代码” 之间搭了一座桥,屏蔽了不同 STM32 型号(如 F1、F4、H7)的硬件差异,让代码更通用、更易移植。HAL 库函数的核心特点高度抽象与标准化:无论你用 STM32F103 还是 STM32F407,控制 GPIO 输出的函数都是:HAL_GPIO_WritePin(),底层寄存器的差异由 HAL 库自己处理,你无需关注。易用性强(新手友好):函数命名直观,比如:HAL_UART_Transmit():串口发送数据;HAL_TIM_PWM_Start():启动定时器 PWM 输出;HAL_ADC_GetValue():读取 ADC 转换结果。:官方维护,稳定性高由 ST 公司持续更新,适配新的 STM32 芯片,且经过严格测试,比自己写寄存器代码更不容易出错。
HAL 库对 GPIO 的操作做了高度封装,所有 GPIO 相关函数都以HAL_GPIO_为前缀,核心可分为初始化 / 反初始化、输入输出操作、电平检测 / 翻转、中断相关四大类,下面逐一列出并说明用法:一、基础配置类(初始化 / 反初始化)这类函数用于配置 GPIO 的工作模式(输入 / 输出 / 中断等),是使用 GPIO 的第一步。1. HAL_GPIO_Init()功能:初始化指定 GPIO 端口和引脚的参数(模式、上下拉、速度等)原型:voidHAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);示例:配置 PA5 为推挽输出GPIO_InitTypeDef gpio_conf = {0};// 选择PA5引脚gpio_conf.Pin = GPIO_PIN_5;// 推挽输出模式gpio_conf.Mode = GPIO_MODE_OUTPUT_PP;// 无上下拉gpio_conf.Pull = GPIO_NOPULL;// 低速gpio_conf.Speed = GPIO_SPEED_FREQ_LOW;// 初始化GPIOAHAL_GPIO_Init(GPIOA, &gpio_conf);2. HAL_GPIO_DeInit()功能:将指定 GPIO 引脚恢复为默认复位状态(禁用引脚功能)原型:voidHAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);示例:复位 PA5 引脚HAL_GPIO_DeInit(GPIOA, GPIO_PIN_5);二、输出操作类(控制引脚电平)这类函数用于设置 GPIO 输出引脚的高 / 低电平,是最常用的 GPIO 操作。1. HAL_GPIO_WritePin()功能:直接设置指定引脚的电平(高 / 低)原型:voidHAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin, GPIO_PinState PinState);参数说明:PinState:GPIO_PIN_SET(高电平)/GPIO_PIN_RESET(低电平)示例:// PA5输出高电平(点亮LED)HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);// PA5输出低电平(熄灭LED)HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);2. HAL_GPIO_TogglePin()功能:翻转指定引脚的电平(高变低、低变高),无需判断当前电平原型:voidHAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);示例:PA5 电平翻转(LED 闪烁核心函数)HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);HAL_Delay(500); // 延时500ms,实现闪烁三、输入操作类(读取引脚电平)这类函数用于读取 GPIO 输入引脚的当前电平,常用于读取按键、传感器等输入信号。1. HAL_GPIO_ReadPin()功能:读取指定引脚的当前电平状态原型:GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin);返回值:GPIO_PIN_SET(高电平)/GPIO_PIN_RESET(低电平)示例:读取 PA0 按键状态(PA0 配置为上拉输入)if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET){// 按键按下(低电平),执行对应逻辑HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); // 翻转LEDHAL_Delay(200); // 消抖延时}四、中断相关类(GPIO 中断配置 / 处理)这类函数用于配置和处理 GPIO 的外部中断(比如按键中断触发),属于进阶用法。1. HAL_GPIO_EXTI_IRQHandler()功能:GPIO 外部中断服务函数(中断发生时调用),用于清除中断标志位原型:voidHAL_GPIO_EXTI_IRQHandler(uint32_t GPIO_Pin);示例:PA0 中断服务函数voidEXTI0_IRQHandler(void){// 处理PA0中断,清除中断标志HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);}2. HAL_GPIO_EXTI_Callback()功能:GPIO 中断回调函数(需用户重写),中断触发后执行具体逻辑原型:voidHAL_GPIO_EXTI_Callback(uint32_t GPIO_Pin);示例:重写回调函数,按键中断翻转 LEDvoid HAL_GPIO_EXTI_Callback(uint32_t GPIO_Pin){if(GPIO_Pin == GPIO_PIN_0){// PA0中断触发,翻转PA5电平HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);}}补充说明引脚宏定义:可以同时操作多个引脚,比如GPIO_PIN_0 | GPIO_PIN_1(同时控制 PA0 和 PA1);端口范围:GPIOx支持GPIOA/GPIOB/GPIOC等(取决于具体 STM32 型号);依赖:使用所有 GPIO 函数前,需先通过__HAL_RCC_GPIOx_CLK_ENABLE()开启对应 GPIO 端口的时钟(STM32CubeMX 生成代码时会自动添加)。总结HAL 库 GPIO 函数核心分为 4 类:初始化(HAL_GPIO_Init)、输出控制(WritePin/TogglePin)、输入读取(ReadPin)、中断处理(EXTI_IRQHandler/Callback);最常用的是HAL_GPIO_WritePin(写电平)和HAL_GPIO_ReadPin(读电平),新手优先掌握这两个;HAL_GPIO_TogglePin是实现电平翻转的便捷函数,无需手动判断当前电平状态,适合做 LED 闪烁等场景。
static void MX_GPIO_Init(void){GPIO_InitTypeDef GPIO_InitStruct = {0};/* 使能GPIOA时钟 */__HAL_RCC_GPIOA_CLK_ENABLE();/* 配置LED引脚:PA0~PA9 推挽输出、上拉、高速 */GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3| GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7| GPIO_PIN_8 | GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* 配置按键引脚:PA10 上拉输入 */GPIO_InitStruct.Pin = GPIO_PIN_10;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 输入模式GPIO_InitStruct.Pull = GPIO_PULLUP; // 内部上拉(按键按下为低)HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* 初始化时熄灭所有LED */LED_All_Off();}
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

