在Linux内核驱动开发中,阻塞与非阻塞IO是最基础且核心的IO模型,直接决定了进程与设备交互的效率和资源占用方式。无论是字符设备、块设备驱动,还是用户态应用程序的IO调用,都离不开对这两种模型的理解与合理运用。
本文将结合阻塞/非阻塞IO的核心理论、等待队列机制、globalfifo驱动实例,重点适配Linux 6.6内核的实际特性(兼容旧接口、优化点、实操注意事项),从原理拆解、内核实现、驱动实操到用户态验证,手把手带你吃透Linux 6.6下的阻塞与非阻塞IO。
一、核心概念:阻塞与非阻塞IO的本质区别
阻塞与非阻塞IO的核心差异,在于进程无法获取设备资源时的处理逻辑——前者“等待资源”,后者“立即返回”,两者没有绝对的优劣,需根据场景选择。
1.1 阻塞IO:“等待资源就绪,再执行操作”
阻塞IO的核心逻辑的是“未就绪则挂起”:当进程调用read()、write()等系统调用访问设备时,若设备资源(如缓冲区、硬件接口)未就绪,进程会主动放弃CPU,进入睡眠状态,并从内核调度器的运行队列中移除,直到等待的资源满足可操作条件(如缓冲区有数据、硬件就绪),才会被唤醒并继续执行IO操作。
对用户态应用而言,阻塞IO是“透明的”——应用程序调用系统调用后会一直阻塞,直到IO完成才返回结果,无需关心内核层面的进程调度和资源等待。
关键注意点(Linux 6.6兼容):阻塞IO必须保证“有唤醒机制”,否则睡眠的进程会永久挂起(俗称“僵死”)。在Linux内核中,唤醒逻辑大多与中断绑定(硬件资源就绪时触发中断,中断服务程序唤醒阻塞进程),这也是驱动开发中阻塞IO实现的核心要点。
1.2 非阻塞IO:“不等待,要么放弃要么轮询”
非阻塞IO的核心逻辑是“未就绪则立即返回”:当进程调用IO系统调用时,若设备资源未就绪,内核不会挂起进程,而是立即返回一个错误码(**-EAGAIN**),告知应用程序“资源暂时不可用,请稍后再试”。
应用程序收到-EAGAIN后,有两种处理方式:一是直接放弃IO操作,二是通过循环轮询的方式反复调用IO接口,直到资源就绪并完成操作。
Linux 6.6补充:非阻塞IO的优势是“不浪费CPU等待时间”,适合对响应速度敏感的场景(如网络IO、串口实时通信);但轮询机制会占用额外CPU资源,因此实际开发中常结合IO多路复用(select/poll/epoll)优化,避免无效轮询。
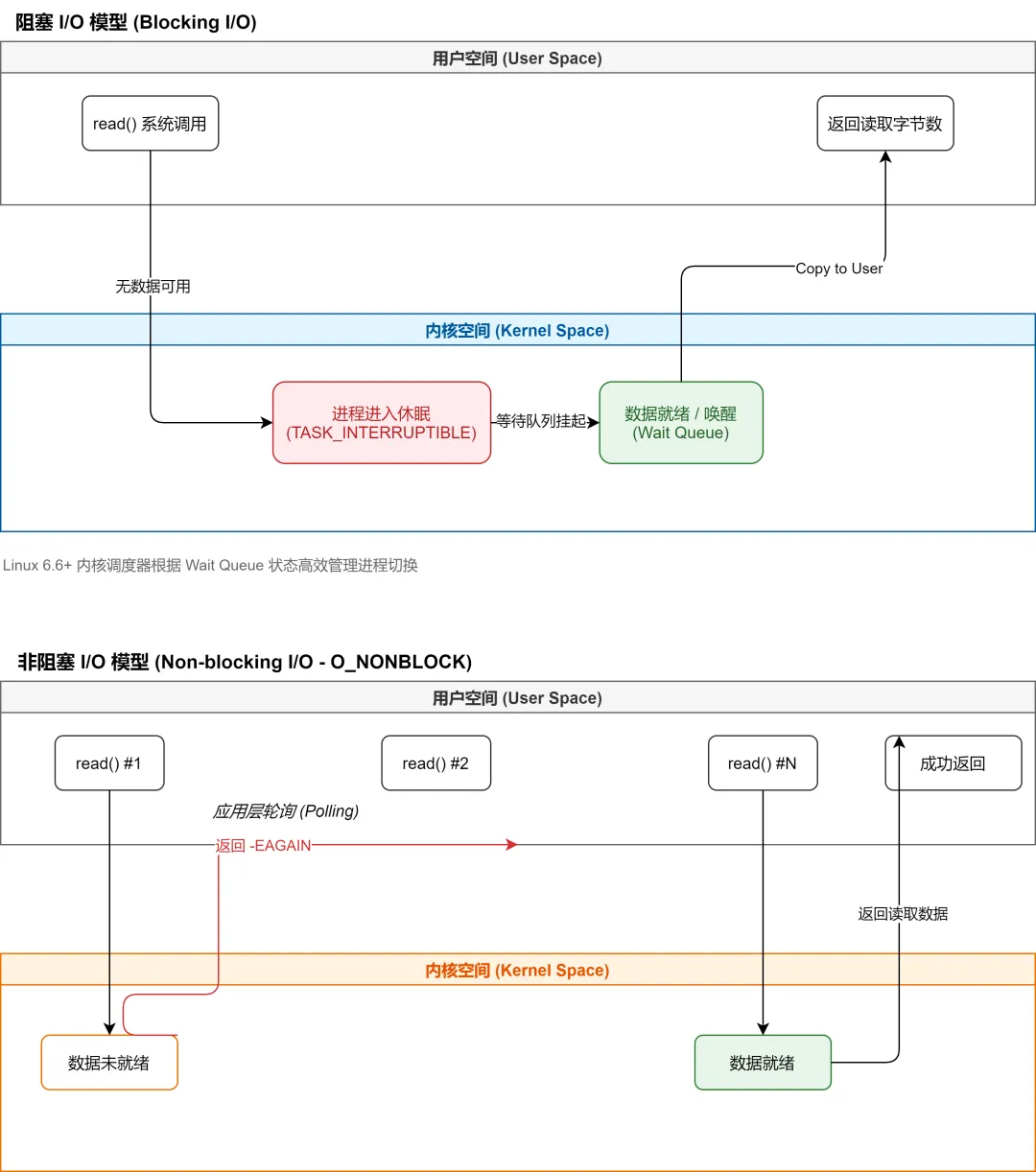
1.3 一张图看懂两者流程(适配Linux 6.6内核)
阻塞IO流程:用户态调用read/write → 内核检查资源 → 资源未就绪 → 进程睡眠(移出运行队列) → 资源就绪(中断唤醒) → 进程恢复运行 → 完成IO → 返回结果。
非阻塞IO流程:用户态调用read/write → 内核检查资源 → 资源未就绪 → 立即返回-EAGAIN → 应用程序轮询调用 → 资源就绪 → 完成IO → 返回结果。
二、用户态控制:阻塞与非阻塞IO的切换方式
在Linux中,用户态应用程序可以通过两种方式控制IO的阻塞/非阻塞模式,Linux 6.6完全兼容这两种方式,且无接口变更,实操性极强。
2.1 方式1:打开文件时指定(最常用)
通过open()系统调用的flags参数,指定O_NONBLOCK标志,即可设置非阻塞模式;不指定则默认是阻塞模式。串口读写实例,在Linux 6.6中可直接运行,以下是简化实操版。
实例1:阻塞方式读串口(/dev/ttyS1)
char buf;// 不指定O_NONBLOCK,默认阻塞模式int fd = open("/dev/ttyS1", O_RDWR);if (fd < 0) { perror("open error"); return-1; }// 阻塞等待:直到串口有输入才返回ssize_t res = read(fd, &buf, 1);if (res == 1) {printf("读取到字符:%c\n", buf);}close(fd);
实例2:非阻塞方式读串口(/dev/ttyS1)
char buf;// 指定O_NONBLOCK,设置为非阻塞模式int fd = open("/dev/ttyS1", O_RDWR | O_NONBLOCK);if (fd < 0) { perror("open error"); return-1; }// 轮询读取:未就绪则返回-EAGAIN,循环重试while (read(fd, &buf, 1) != 1) {// 可添加微小延时,减少CPU占用(Linux 6.6推荐用usleep) usleep(1000);}printf("读取到字符:%c\n", buf);close(fd);
2.2 方式2:文件打开后动态切换(灵活适配场景)
若文件已打开(默认阻塞模式),可通过fcntl()或ioctl()系统调用动态修改IO模式,Linux 6.6中fcntl()接口更常用、更稳定,推荐优先使用。
核心示例(将阻塞IO改为非阻塞IO):
// 假设fd已通过open()打开(默认阻塞)int flags = fcntl(fd, F_GETFL); // 获取当前文件状态标志if (flags < 0) { perror("fcntl F_GETFL error"); return-1; }// 设置O_NONBLOCK标志,改为非阻塞模式flags |= O_NONBLOCK;if (fcntl(fd, F_SETFL, flags) < 0) { perror("fcntl F_SETFL error");return-1;}
补充(Linux 6.6):若要从非阻塞切换回阻塞,只需执行flags &= ~O_NONBLOCK,再调用fcntl()设置即可。
三、内核驱动实现:等待队列(阻塞IO的核心)
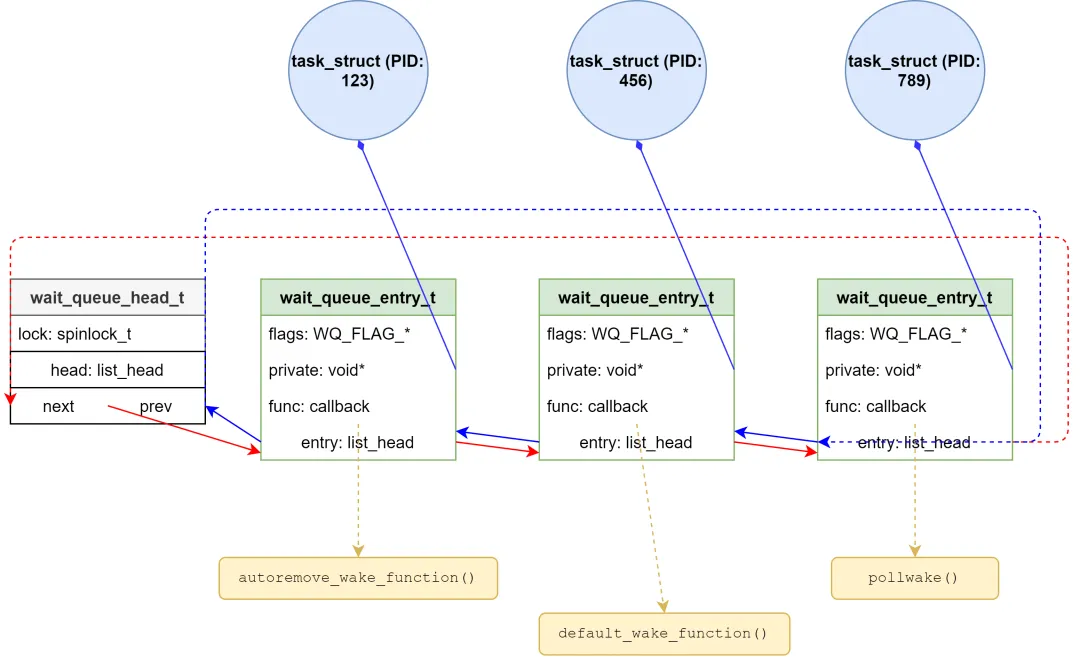
Linux内核中,阻塞IO的实现依赖等待队列(Wait Queue)——它是内核中用于同步进程与资源的基础机制,与进程调度紧密结合,信号量、互斥体等同步机制在底层也依赖等待队列实现。
Linux 6.6内核中,等待队列的核心接口完全兼容旧版本(无API废弃),但增加了部分性能优化(如等待队列元素的快速插入/删除),讲解驱动中等待队列的实操的流程。
3.1 等待队列的核心操作(Linux 6.6实操版)
等待队列的操作分为7步,对应的核心知识点,以下是Linux 6.6中驱动开发的标准用法,附带关键注释:
定义等待队列头部:使用wait_queue_head_t类型,本质是__wait_queue_head结构体的typedef,用于管理等待队列链表。wait_queue_head_t my_wait_queue; // 定义等待队列头部
初始化等待队列头部:有两种方式,推荐使用DECLARE_WAITQUEUE_HEAD()宏(快捷方式),无需单独调用init_waitqueue_head()。// 方式1:快捷宏(定义+初始化,推荐) DECLARE_WAITQUEUE_HEAD(my_wait_queue); // 方式2:手动初始化(适用于动态定义的头部) init_waitqueue_head(&my_wait_queue);
定义等待队列元素:使用DECLARE_WAITQUEUE()宏,绑定当前进程(current指针,内核中表示当前运行的进程)。// 定义并初始化等待队列元素,绑定当前进程 DECLARE_WAITQUEUE(wait, current);
添加/移除等待队列元素:将等待队列元素加入/移出等待队列头部管理的链表,核心接口add_wait_queue()和remove_wait_queue()。// 将wait元素添加到my_wait_queue队列头部 add_wait_queue(&my_wait_queue, &wait); // 完成IO后,将wait元素从队列中移除(必须执行,避免内存泄漏) remove_wait_queue(&my_wait_queue, &wait);
等待事件(核心步骤):进程进入等待状态,直到指定条件满足才被唤醒。Linux 6.6中常用4个宏,核心区别在于“是否可被信号打断”和“是否超时”:
wait_event(queue, condition):不可被信号打断,直到condition为真才唤醒。
wait_event_interruptible(queue, condition):可被信号打断(推荐,避免进程僵死),Linux 6.6驱动开发中优先使用。
wait_event_timeout(queue, condition, timeout):不可被信号打断,超时(jiffy为单位)后强制返回。
wait_event_interruptible_timeout(queue, condition, timeout):可被信号打断,支持超时。
唤醒队列:资源就绪后,唤醒等待队列中的进程,需与等待事件宏成对使用(避免唤醒无效进程):// 与wait_event()/wait_event_timeout()成对使用,唤醒所有进程 wake_up(&my_wait_queue); // 与wait_event_interruptible()/wait_event_interruptible_timeout()成对使用(推荐) wake_up_interruptible(&my_wait_queue);Linux 6.6补充:wake_up()可唤醒TASK_INTERRUPTIBLE(浅度睡眠)和TASK_UNINTERRUPTIBLE(深度睡眠)状态的进程;wake_up_interruptible()仅唤醒TASK_INTERRUPTIBLE状态的进程,更安全。
在等待队列上睡眠:简化版接口sleep_on()和interruptible_sleep_on(),本质是“定义元素+添加队列+等待唤醒”的封装,Linux 6.6中仍可用,但推荐使用等待事件宏(更灵活)。
3.2 等待队列实操模板(Linux 6.6驱动)
适配Linux 6.6内核,编写驱动中写操作的阻塞IO模板(含非阻塞判断、信号处理、死锁避免),关键代码带详细注释:
staticssize_txxx_write(struct file *file, constchar __user *buffer, size_t count, loff_t *ppos){int ret = 0;int avail; // 用于判断设备缓冲区是否可写// 1. 定义并初始化等待队列元素,绑定当前进程 DECLARE_WAITQUEUE(wait, current);// 2. 将等待队列元素添加到自定义的等待队列头部(xxx_wait需提前定义初始化) add_wait_queue(&xxx_wait, &wait);// 3. 循环等待设备缓冲区可写(避免虚假唤醒,Linux 6.6推荐用do-while)do { avail = device_writable(...); // 自定义函数:判断缓冲区是否可写(返回值<0表示不可写)if (avail < 0) {// 4. 判断是否为非阻塞IO,若是则立即返回-EAGAINif (file->f_flags & O_NONBLOCK) { ret = -EAGAIN;goto out; // 跳转到out,移除等待队列元素 }// 5. 设置进程状态为TASK_INTERRUPTIBLE(浅度睡眠,可被信号打断) __set_current_state(TASK_INTERRUPTIBLE);// 6. 调度其他进程执行,当前进程进入睡眠(Linux 6.6调度逻辑无变更) schedule();// 7. 唤醒后判断:若为信号唤醒,返回-ERESTARTSYS(内核会重新调度)if (signal_pending(current)) { ret = -ERESTARTSYS;goto out; } } } while (avail < 0);// 8. 缓冲区可写,执行写操作(自定义写逻辑) device_write(...);out:// 9. 移除等待队列元素(必须执行,否则会导致内存泄漏) remove_wait_queue(&xxx_wait, &wait);// 10. 将进程状态重置为TASK_RUNNING(避免状态异常) set_current_state(TASK_RUNNING);return ret;}
3.3 关键注意点(Linux 6.6驱动避坑)
避免虚假唤醒:等待事件必须用循环(do-while)判断条件,因为内核可能会出现“虚假唤醒”(无资源就绪却唤醒进程),Linux 6.6仍存在此情况,需通过循环再次校验条件。
信号处理:优先使用wait_event_interruptible(),并判断signal_pending(current),否则进程可能被信号永久挂起(Linux 6.6对信号处理的兼容性无变化)。
资源释放:睡眠前若持有互斥体、自旋锁等同步锁,必须先释放(如globalfifo驱动的第17行、69行),否则会导致死锁(Linux 6.6对死锁的检测更严格,会直接触发内核告警)。
四、实战案例:Linux 6.6 globalfifo驱动(支持阻塞/非阻塞IO)
结合globalfifo驱动实例,适配Linux 6.6内核,实现一个支持阻塞/非阻塞读写的字符设备驱动,涵盖设备结构体定义、模块加载、读写函数实现,可直接编译运行(需适配内核源码路径)。
4.1 驱动核心实现(Linux 6.6适配版)
核心思路:将globalmem改为FIFO缓冲区,读进程阻塞等待“缓冲区非空”,写进程阻塞等待“缓冲区非满”,读写操作相互唤醒,同时支持非阻塞模式和互斥保护(避免并发问题)。
步骤1:定义设备结构体(增加等待队列头部)
#include<linux/module.h>#include<linux/fs.h>#include<linux/mutex.h>#include<linux/wait.h>#include<linux/slab.h>#include<linux/uaccess.h>#define GLOBALFIFO_SIZE 1024 // FIFO缓冲区大小#define GLOBALFIFO_MAJOR 231 // 主设备号(可自定义,避免冲突)staticint globalfifo_major = GLOBALFIFO_MAJOR;// 设备结构体:包含cdev、缓冲区、互斥体、等待队列头部structglobalfifo_dev {structcdevcdev;// 字符设备核心结构体unsignedint current_len; // FIFO中有效数据长度(0=空,GLOBALFIFO_SIZE=满)unsignedchar mem[GLOBALFIFO_SIZE]; // FIFO缓冲区structmutexmutex;// 互斥体,保护临界资源(避免并发读写冲突)wait_queue_head_t r_wait; // 读等待队列:等待缓冲区非空wait_queue_head_t w_wait; // 写等待队列:等待缓冲区非满};staticstructglobalfifo_dev *globalfifo_devp;
步骤2:模块加载函数(初始化等待队列)
// 字符设备操作集(后续实现read/write)staticconststructfile_operationsglobalfifo_fops = { .owner = THIS_MODULE, .read = globalfifo_read, .write = globalfifo_write, .open = globalfifo_open, .release = globalfifo_release,};// 初始化字符设备staticvoidglobalfifo_setup_cdev(struct globalfifo_dev *dev, int index){int devno = MKDEV(globalfifo_major, index); cdev_init(&dev->cdev, &globalfifo_fops); dev->cdev.owner = THIS_MODULE; cdev_add(&dev->cdev, devno, 1);}// 模块加载函数(Linux 6.6无接口变更)staticint __init globalfifo_init(void){int ret;dev_t devno = MKDEV(globalfifo_major, 0);// 注册设备号(动态/静态)if (globalfifo_major) { ret = register_chrdev_region(devno, 1, "globalfifo"); } else { ret = alloc_chrdev_region(&devno, 0, 1, "globalfifo"); globalfifo_major = MAJOR(devno); }if (ret < 0) return ret;// 分配设备结构体内存(GFP_KERNEL:内核态正常分配) globalfifo_devp = kzalloc(sizeof(struct globalfifo_dev), GFP_KERNEL);if (!globalfifo_devp) { ret = -ENOMEM;goto fail_malloc; }// 初始化字符设备、互斥体、等待队列头部 globalfifo_setup_cdev(globalfifo_devp, 0); mutex_init(&globalfifo_devp->mutex); init_waitqueue_head(&globalfifo_devp->r_wait); // 初始化读等待队列 init_waitqueue_head(&globalfifo_devp->w_wait); // 初始化写等待队列 printk(KERN_INFO "globalfifo driver init ok (Linux 6.6)\n");return0;fail_malloc: unregister_chrdev_region(devno, 1);return ret;}module_init(globalfifo_init); // 注册模块加载函数
步骤3:读写函数实现(支持阻塞/非阻塞)
核心逻辑:读函数阻塞等待“缓冲区非空”,写函数阻塞等待“缓冲区非满”,读写完成后相互唤醒,同时处理非阻塞模式和信号唤醒,避免死锁。
// 读函数:阻塞等待缓冲区非空,支持非阻塞模式staticssize_tglobalfifo_read(struct file *filp, char __user *buf, size_t count, loff_t *ppos){int ret;structglobalfifo_dev *dev = filp->private_data; DECLARE_WAITQUEUE(wait, current); // 定义等待队列元素 mutex_lock(&dev->mutex); // 加互斥体,保护临界资源 add_wait_queue(&dev->r_wait, &wait); // 加入读等待队列// 循环等待:缓冲区为空则睡眠(避免虚假唤醒)while (dev->current_len == 0) {// 非阻塞模式:立即返回-EAGAINif (filp->f_flags & O_NONBLOCK) { ret = -EAGAIN;goto out; }// 设置进程为浅度睡眠,调度其他进程 __set_current_state(TASK_INTERRUPTIBLE); mutex_unlock(&dev->mutex); // 睡眠前释放互斥体,避免死锁(关键!) schedule();// 唤醒后判断:是否为信号唤醒if (signal_pending(current)) { ret = -ERESTARTSYS;goto out2; } mutex_lock(&dev->mutex); // 唤醒后重新加互斥体 }// 读取数据:最多读取当前有效数据长度if (count > dev->current_len) { count = dev->current_len; }// 将内核缓冲区数据拷贝到用户空间(copy_to_user返回0表示成功)if (copy_to_user(buf, dev->mem, count)) { ret = -EFAULT;goto out; } else {// 移动缓冲区数据(移除已读取的数据)memcpy(dev->mem, dev->mem + count, dev->current_len - count); dev->current_len -= count; printk(KERN_INFO "read %zd bytes, current_len: %u\n", count, dev->current_len);// 读完成后,唤醒写等待队列(缓冲区有空闲空间了) wake_up_interruptible(&dev->w_wait); ret = count; }out: mutex_unlock(&dev->mutex); // 释放互斥体out2: remove_wait_queue(&dev->r_wait, &wait); // 移除等待队列元素 set_current_state(TASK_RUNNING); // 重置进程状态return ret;}// 写函数:阻塞等待缓冲区非满,支持非阻塞模式(与读函数逻辑对称)staticssize_tglobalfifo_write(struct file *filp, constchar __user *buf, size_t count, loff_t *ppos){int ret;structglobalfifo_dev *dev = filp->private_data; DECLARE_WAITQUEUE(wait, current); mutex_lock(&dev->mutex); add_wait_queue(&dev->w_wait, &wait);// 循环等待:缓冲区满则睡眠while (dev->current_len == GLOBALFIFO_SIZE) {if (filp->f_flags & O_NONBLOCK) { ret = -EAGAIN;goto out; } __set_current_state(TASK_INTERRUPTIBLE); mutex_unlock(&dev->mutex); // 睡眠前释放互斥体 schedule();if (signal_pending(current)) { ret = -ERESTARTSYS;goto out2; } mutex_lock(&dev->mutex); }// 写入数据:最多写入剩余空间if (count > GLOBALFIFO_SIZE - dev->current_len) { count = GLOBALFIFO_SIZE - dev->current_len; }// 将用户空间数据拷贝到内核缓冲区if (copy_from_user(dev->mem + dev->current_len, buf, count)) { ret = -EFAULT;goto out; } else { dev->current_len += count; printk(KERN_INFO "written %zd bytes, current_len: %u\n", count, dev->current_len);// 写完成后,唤醒读等待队列(缓冲区有数据了) wake_up_interruptible(&dev->r_wait); ret = count; }out: mutex_unlock(&dev->mutex);out2: remove_wait_queue(&dev->w_wait, &wait); set_current_state(TASK_RUNNING);return ret;}
4.2 Linux 6.6驱动编译与加载
编写Makefile(适配Linux 6.6内核源码路径),编译生成.ko模块,然后加载模块、创建设备节点,步骤如下:
1. Makefile编写
obj-m += globalfifo.oKERNELDIR ?= /lib/modules/$(shell uname -r)/build # Linux 6.6内核源码路径PWD := $(shell pwd)default:$(MAKE) -C $(KERNELDIR) M=$(PWD) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(PWD) clean
2. 编译与加载
# 编译驱动模块(需安装Linux 6.6内核开发包)make# 加载驱动模块sudo insmod globalfifo.ko# 查看模块是否加载成功lsmod | grep globalfifo# 创建设备文件节点(主设备号231,与驱动中一致)sudo mknod /dev/globalfifo c 231 0# 修改设备节点权限(允许普通用户访问)sudo chmod 666 /dev/globalfifo
五、用户态验证:阻塞/非阻塞IO实测(Linux 6.6)
驱动加载完成后,在用户态通过简单命令或代码,验证阻塞与非阻塞IO的功能,完全复用的验证逻辑,Linux 6.6中可直接执行。
5.1 阻塞IO验证(默认模式)
# 1. 打开第一个终端,后台执行cat命令(阻塞读,等待缓冲区有数据)cat /dev/globalfifo &# 2. 打开第二个终端,向设备写入数据(写完成后唤醒读进程)echo"Linux 6.6 globalfifo block IO test" > /dev/globalfifo# 3. 查看第一个终端输出(会打印写入的数据,说明阻塞读正常)
5.2 非阻塞IO验证
编写用户态非阻塞读代码(test_nonblock.c),验证非阻塞模式下的-EAGAIN返回值:
#include<stdio.h>#include<fcntl.h>#include<unistd.h>#include<errno.h>intmain(){char buf[32];int fd = open("/dev/globalfifo", O_RDONLY | O_NONBLOCK); // 非阻塞读if (fd < 0) { perror("open error"); return-1; }// 缓冲区为空,非阻塞读应返回-EAGAINssize_t ret = read(fd, buf, sizeof(buf));if (ret < 0) {if (errno == EAGAIN) {printf("非阻塞读:资源暂时不可用(-EAGAIN)\n"); } else { perror("read error"); } } close(fd);return0;}
编译运行:
gcc test_nonblock.c -o test_nonblock./test_nonblock# 输出:非阻塞读:资源暂时不可用(-EAGAIN),说明非阻塞模式正常
5.3 权限注意事项(Linux 6.6)
向/dev/globalfifo写入数据需root权限,直接执行sudo echo会失效,推荐先切换到root用户:
sudo su #echo"test" > /dev/globalfifo
六、Linux 6.6内核相关优化与注意事项
Linux 6.6内核中,阻塞与非阻塞IO的核心机制未发生变更,但针对等待队列、进程调度做了部分性能优化,驱动开发中需注意以下几点:
等待队列性能优化:Linux 6.6优化了等待队列元素的插入/删除效率,尤其是高并发场景下,add_wait_queue()和remove_wait_queue()的执行速度更快,无需修改驱动代码,直接兼容旧接口。
互斥体与死锁检测:Linux 6.6对内核死锁的检测更严格,若阻塞进程睡眠前未释放互斥体,会触发内核告警(dmesg可查看),因此必须严格遵循“睡眠前释放锁、唤醒后重新加锁”的原则。
O_NONBLOCK标志兼容性:Linux 6.6完全兼容O_NONBLOCK标志,无论是open()指定还是fcntl()动态修改,行为与旧版本一致,无需适配。
信号处理优化:signal_pending(current)的执行效率提升,在非阻塞IO的信号唤醒场景中,响应速度更快,驱动中的信号处理逻辑无需修改。
七、总结:阻塞与非阻塞IO的选型建议
结合Linux 6.6内核特性和实际开发场景,总结两种IO模型的选型原则,帮你避免无效开发:
优先选阻塞IO:适用于“IO操作不频繁、对CPU占用不敏感”的场景(如普通字符设备读写、磁盘文件操作),实现简单、资源占用低,无需处理轮询和-EAGAIN错误。
选非阻塞IO:适用于“对响应速度敏感、IO频繁”的场景(如串口实时通信、网络IO),但需结合IO多路复用(epoll)优化轮询,避免CPU资源浪费。
驱动开发核心:阻塞IO的关键是“等待队列+唤醒机制”,非阻塞IO的关键是“-EAGAIN处理+轮询优化”,两者都需注意同步锁的合理使用,避免死锁和并发问题。
本文结合的核心知识点,适配Linux 6.6内核的实际特性,从原理到实操,完整覆盖了阻塞与非阻塞IO的驱动开发和用户态验证。