在光学检测、生物医学成像、具身智能、无人机视觉导航以及智能制造等众多研究与工业领域中,目标实时检测与跟踪技术始终是一个既热门又高度成熟的核心方向。从学术研究到工业落地,目标检测技术已经覆盖了:
人脸识别与身份验证
多目标检测与实时跟踪
行人检测与行为分析
库房计数与物流分拣
缺陷检测与精密测量
然而,在实际工程应用中,许多开发者面临的痛点并非算法本身,而是如何打通“算法”与“硬件”的最后一公里。实验室里用 WebCam 跑通的代码,到了工业现场面对工业相机(Industrial Camera)时,往往会遇到驱动调用复杂、帧率不稳定、网络丢包、延迟过高等问题。本期将以海康威视(Hikrobot)工业相机为例,从 MATLAB 算法验证 到 Python 工程部署,深度解析 USB 接口与 GigE 网口 的开发全流程,并带你接入目标检测算法模型,构建一套完整的工业视觉实时检测系统。
一、Matlab简易控制--USB相机与IP相机
MATLAB 拥有强大的工具箱(Image Acquisition Toolbox),非常适合在算法研究阶段快速调试相机参数。
1.1 MATLAB 控制 USB 相机
对于即插即用的USB相机(如罗技C1000或工业USB相机),MATLAB 的 webcam 函数可以实现秒级连接
% 1. 查找系统中的相机列表camList = webcamlist; disp(camList);% 2. 创建相机对象cam = webcam(1);% 3. 预览视频流preview(cam);% 4. 捕获单帧图像img = snapshot(cam);imshow(img);% 5. 释放资源clear cam;
1.2 MATLAB 控制网络 IP 相机
对于通过网线连接的工业相机(如海康威视、Axis),我们需要使用 ipcam或者 ipcam 对象配合 RTSP 协议
url = 'http://192.168.1.64/mjpg/video.mjpg'; % 示例URL,具体视厂商而定net_cam = ipcam(url, 'admin', 'password123');% 循环读取并显示figure;while ishandle(gcf) frame = snapshot(net_cam); imshow(frame); drawnow;endclear net_cam;%% MATLAB 的优势在于可视化和交互式调试,但在处理高帧率实时流时,性能略逊于 C++ 或 Python
二、Python--USB相机与IP相机
这是工业现场最常见的场景。大多数网络摄像机(IPC)都支持 RTSP 协议。我们需要构造一个包含用户名、密码、IP地址、端口和通道号的 URL 字符串。
import cv2# --------------------------------------------------------# 核心配置区# RTSP URL 格式通常为: rtsp://[用户]:[密码]@[IP]:[端口]/[路径]# 海康威视典型格式:rtsp://admin:password@ip:554/Streaming/Channels/101# --------------------------------------------------------# 密码需要改成你的真实摄像头密码url = "rtsp://admin:密码@192.168.1.64:554/Streaming/Channels/102"print(f"正在尝试连接相机: {url} ...")# USB相机:cap = cv2.VideoCapture(0) ,cap = cv2.VideoCapture(1)之类的cap = cv2.VideoCapture(url)# 检查相机是否成功打开if not cap.isOpened(): print("❌ 无法打开相机!请检查:") print("1. IP地址是否在同一网段") print("2. 账号密码是否正确") print("3. RTSP流地址格式是否匹配厂商标准") exit()print("✅ 相机连接成功,按 'q' 键退出预览")# 实时处理循环while True: # 逐帧捕获 ret, frame = cap.read() # 如果读取成功 if ret: # result = model(frame) cv2.imshow('IP Camera Stream', frame) # 接收键盘输入,按q退出 if cv2.waitKey(1) & 0xFF == ord('q'): break else: print("读取帧失败,可能是网络波动或编码格式不支持") # 可以在此处添加重连机制 break# 释放资源cap.release()cv2.destroyAllWindows()print("资源已释放,程序结束。")
三、相机SDK调用
由于不同厂家生产的工业相机SDK不同,因此控制方式也不相同,这里仅仅给出某品牌显微镜相机的SDK控制方式,对于其它品牌的相机请读者自行尝试。
import nncamclass App: def __init__(self): self.hcam = None self.buf = None self.total = 0# the vast majority of callbacks come from nncam.dll/so/dylib internal threads @staticmethod def cameraCallback(nEvent, ctx): if nEvent == nncam.NNCAM_EVENT_IMAGE: ctx.CameraCallback(nEvent) def CameraCallback(self, nEvent): if nEvent == nncam.NNCAM_EVENT_IMAGE: try: self.hcam.PullImageV4(self.buf, 0, 24, 0, None) self.total += 1 print('pull image ok, total = {}'.format(self.total)) except nncam.HRESULTException as ex: print('pull image failed, hr=0x{:x}'.format(ex.hr & 0xffffffff)) else: print('event callback: {}'.format(nEvent)) def run(self): a = nncam.Nncam.EnumV2() if len(a) > 0: print('{}: flag = {:#x}, preview = {}, still = {}'.format(a[0].displayname, a[0].model.flag, a[0].model.preview, a[0].model.still)) for r in a[0].model.res: print('\t = [{} x {}]'.format(r.width, r.height)) self.hcam = nncam.Nncam.Open(a[0].id) if self.hcam: try: width, height = self.hcam.get_Size() bufsize = nncam.TDIBWIDTHBYTES(width * 24) * height print('image size: {} x {}, bufsize = {}'.format(width, height, bufsize)) self.buf = bytes(bufsize) if self.buf: try: self.hcam.StartPullModeWithCallback(self.cameraCallback, self) except nncam.HRESULTException as ex: print('failed to start camera, hr=0x{:x}'.format(ex.hr & 0xffffffff)) input('press ENTER to exit') finally: self.hcam.Close() self.hcam = None self.buf = None else: print('failed to open camera') else: print('no camera found')if __name__ == '__main__': app = App() app.run()
四、添加智能检测或智能追踪算法
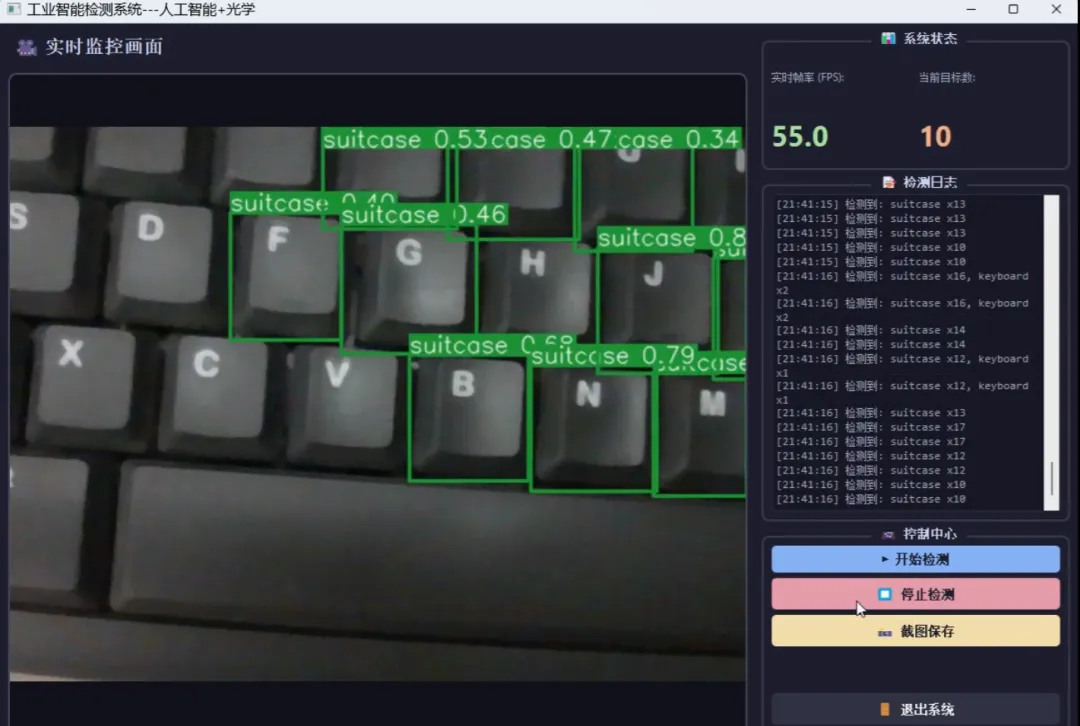
在掌握相机连接基础后,下一步就是赋予系统“智慧”。在工业场景中,我们很少直接盯着控制台代码看,操作员需要的是一个直观的图形界面(GUI)。我们通常需要构建一个可视化的检测软件,功能包括:1. GUI 界面;2. AI 大脑(视觉模块,这也是目前比较火的方案,具身智能);3. 多线程架构:防止界面卡顿,实现流畅的视频流处理。
图 1. 调用相机进行目标实时检测动态图与优化界面
五、总结
关于 RTSP 地址:不同厂商(海康、大华、宇视等)的 RTSP 后缀规则不同,务必查阅对应厂商的开发文档。关于延时:OpenCV 读取 RTSP 流可能会有 200ms-2s 的延时。如果对实时性要求极高(如高速飞拍),建议使用厂商提供的 SDK(C++/Python SDK) 直接获取底层数据流,而非走通用的 RTSP 协议。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
