如果你在写脚本时只定义了接触对(Contact Pair),却没定义接触属性,那你可能会在结果里看到诡异的一幕:一个钢球像穿过空气一样穿过了钢板。
在 Abaqus 的 API 宇宙中,零件之间的法向行为(即"怎么撞、撞多深")是由 NormalBehavior 对象控制的。它是给"幽灵"赋予"肉身"的过程。是硬碰硬的铁汉柔情,还是黏黏糊糊的软接触?全在你几行代码的笔墨之间。
什么是法向接触行为?
在有限元接触分析中,两个物体表面的相互作用可以分解为两个方向:
NormalBehavior 就是专门管理法向行为的"交通规则"。它回答了三个核心问题:
两个表面多久开始接触?
接触后允许穿透多少?
接触压力如何随穿透深度变化?
作为 Abaqus 接触分析中最基础、最关键的参数之一,理解它你就掌握了接触仿真的"命门"。
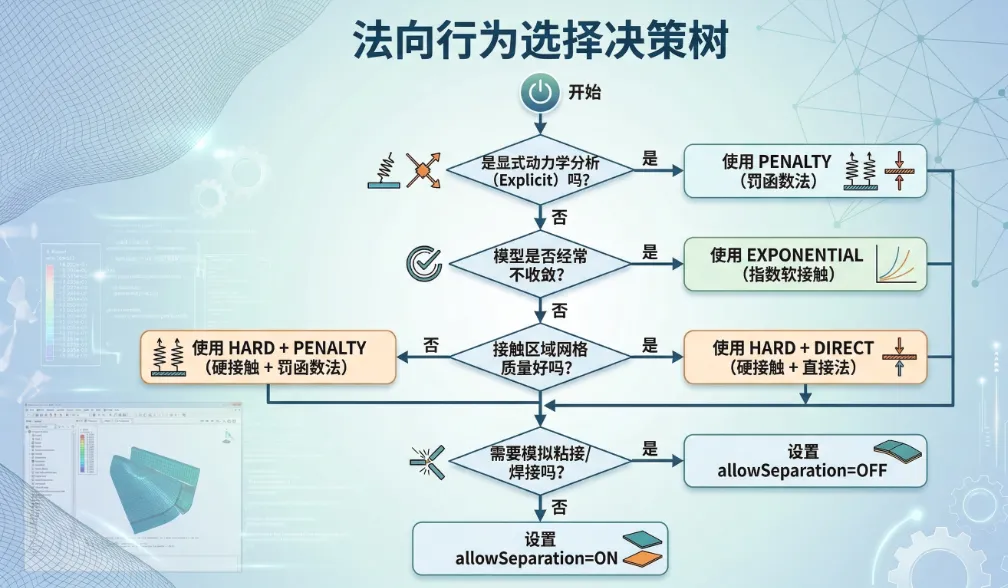
1. 硬接触(Hard Contact):宁死不屈的"铁律"硬接触 (Hard Contact) 是 Abaqus 的默认设置。在代码中表现为 `pressureOverclosure=HARD`。
它遵循严格的"有你没我"原则——只要间隙大于 0,压力就是 0;只要接触上了,间隙必须为 0,压力可以无穷大。
它就像是一个原则性极强的保安。只要你没踏过那根红线,他理都不理你;一旦你想跨过去,他会瞬间爆发无限的力量把你推回去。在数值计算上,这通常靠拉格朗日乘子法(Lagrange Multiplier)来实现,精度极高,但如果网格不好,也是最容易导致"不收敛"的元凶。
硬接触的数学本质:
硬接触的压力 - 过闭合关系可以用一个分段函数表示:
这是一种理想化的模型,在物理上对应完全刚性的接触约束。在有限元实现中,Abaqus 通过以下两种方法之一来执行这个约束:
1. 拉格朗日乘子法(Lagrange Multiplier):
优点:精确满足无穿透条件
缺点:增加系统自由度,可能导致收敛困难
2. 增广拉格朗日法(Augmented Lagrange):
在拉格朗日乘子基础上添加罚刚度项
平衡了精度和收敛性
硬接触的完整代码示例:
from abaqus import mdbfrom abaqusConstants import HARD, PENALTY, DIRECTmodel = mdb.models['Contact-Model']# 创建接触属性contact_prop = model.ContactProperty('Hard-Contact-Prop')# 定义法向行为 - 硬接触contact_prop.NormalBehavior( pressureOverclosure=HARD, # 硬接触 constraintEnforcementMethod=PENALTY, # 罚函数法执行(默认) allowSeparation=ON, # 允许分离 pressureClearance=None # 硬接触不需要此参数)# 可选:使用直接法(更精确但更难收敛)# contact_prop.NormalBehavior(# pressureOverclosure=HARD,# constraintEnforcementMethod=DIRECT,# allowSeparation=ON# )# 创建接触对interaction = model.Interaction( name='Steel-Ball-Contact', createStepName='Step-1', type=SURFACE TO SURFACE, master=master_surface, slave=slave_surface, sliding=FINITE, interactionProperty='Hard-Contact-Prop')
硬接触的适用场景:
✅ 适合使用硬接触的情况:
❌ 不建议使用硬接触的情况:
初始过盈量很大的装配分析
接触表面网格粗糙或不匹配
高度非线性的动态冲击问题
模型已经出现收敛困难
硬接触的调试技巧:
如果你的硬接触模型不收敛,可以尝试以下方法:
# 方法 1:调整接触控制model.contactControls('Hard-Contact-Prop').setValues( stabilizationFactor=0.001, # 添加少量稳定化 enforceContactTolerance=ON # 启用接触容差)# 方法 2:使用自动接触稳定model.contacts('Auto-Stabilize').setValues( stabilizationMethod=CONTACT_STABILIZATION, dampingFactor=0.01)# 方法 3:细化接触区域网格# (需要在 mesh 模块中操作)
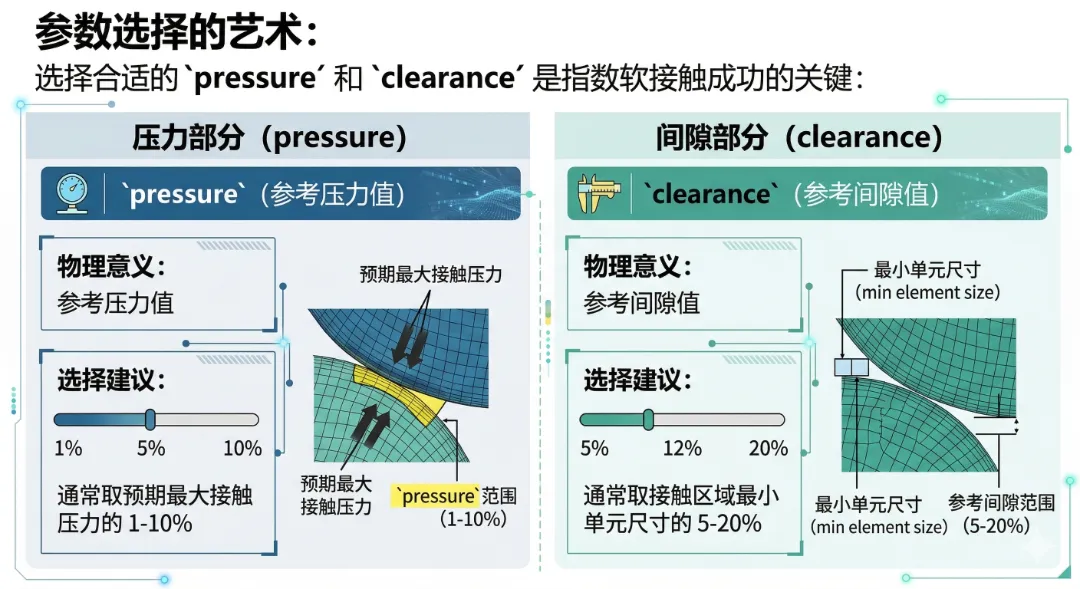
2. 指数软接触(Exponential Soft Contact):自带"缓冲垫"指数软接触 (Exponential Soft Contact) 在代码中表现为 `pressureOverclosure=EXPONENTIAL`。你需要提供两个关键参数:pressure 和 clearance。
压力不再是瞬间爆发,而是随着间隙变小,呈指数级平滑增长。
它给零件表面涂了一层厚厚的"果冻"。两个零件还没真正碰上,由于果冻的存在,彼此就已经感受到了阻力。这种"温柔"的处理方式是解决接触不收敛的灵丹妙药,因为它给了求解器缓冲的余地,避免了力的大起大落。
指数软接触的数学模型:
指数软接触的压力 - 过闭合关系遵循指数函数:
指数软接触的完整代码示例:
from abaqus import mdbfrom abaqusConstants import EXPONENTIAL, TABULARmodel = mdb.models['Soft-Contact-Model']# 创建接触属性contact_prop = model.ContactProperty('Exponential-Soft-Prop')# 方法 1:使用指数软接触# 假设预期最大压力为 100MPa,单元尺寸约 2mmcontact_prop.NormalBehavior( pressureOverclosure=EXPONENTIAL, pressure=1.0e6, # 1 MPa(参考压力) clearance=0.1, # 0.1 mm(参考间隙) allowSeparation=ON # 允许分离)# 方法 2:使用表格定义的软接触(更灵活)# 可以自定义任意 p-h 曲线pressure_data = ( (0.0, 0.0), # 间隙 0.5mm 时,压力为 0 (0.01, 0.1e6), # 间隙 0.1mm 时,压力 0.1MPa (0.05, 1.0e6), # 间隙 0.05mm 时,压力 1MPa (0.1, 10.0e6), # 间隙 0mm 时,压力 10MPa (0.2, 50.0e6), # 过闭合 0.1mm 时,压力 50MPa (0.5, 200.0e6), # 过闭合 0.4mm 时,压力 200MPa)contact_prop.NormalBehavior( pressureOverclosure=TABULAR, table=pressure_data, allowSeparation=ON)
实战案例:橡胶密封圈的压缩分析
假设你要模拟一个橡胶密封圈被压缩的过程,使用指数软接触可以很好地模拟橡胶的柔软特性:
def create_seal_contact(model_name, seal_thickness=2.0): """ 创建密封圈接触属性 参数: model_name: 模型名称 seal_thickness: 密封圈厚度(mm) """ from abaqus import mdb from abaqusConstants import EXPONENTIAL model = mdb.models[model_name] # 创建接触属性 prop_name = 'Seal-Contact' contact_prop = model.ContactProperty(prop_name) # 指数软接触参数 # 密封圈材料较软,选择较小的压力和较大的间隙 pressure = 0.5e6 # 0.5 MPa clearance = seal_thickness * 0.1 # 厚度的 10% contact_prop.NormalBehavior( pressureOverclosure=EXPONENTIAL, pressure=pressure, clearance=clearance, allowSeparation=ON ) # 添加切向摩擦(橡胶摩擦系数较大) contact_prop.TangentialBehavior( formulation=PENALTY, directionality=ISOTROPIC, slipRateDependency=OFF, pressureDependency=OFF, temperatureDependency=OFF, dependencies=0, table=((0.8, ), ), # 摩擦系数 0.8 shearStressLimit=None, maxElasticSlip=1e-05, elasticSlipTolerance=1e-06 ) print(f"密封圈接触属性已创建:{prop_name}") print(f" - 参考压力:{pressure/1e6} MPa") print(f" - 参考间隙:{clearance} mm") return contact_prop# 使用示例create_seal_contact('Seal-Model', seal_thickness=2.0)
指数软接触的调试建议:
1. 如果穿透过大:增大 `pressure` 或减小 `clearance`
2. 如果仍然不收敛:进一步增大 `clearance`,给求解器更多缓冲空间
3. 如果结果太"软":减小 `clearance`,让接触更"硬"一些
4. 最佳实践:先使用较大的 `clearance` 让模型收敛,然后逐步减小以获得更精确的结果
3. 罚函数法(Penalty Method):代码界的"弹簧阵"罚函数法 (Penalty Method) 在 NormalBehavior 的参数中,通过 `constraintEnforcementMethod=PENALTY` 指定。它允许微小的穿透,穿透得越深,反弹力越大。
它在接触面上布满了密密麻麻的微型强力弹簧。虽然名义上是"硬接触",但其实允许你稍微"陷进去"一点点。这是 Abaqus/Explicit(显式计算)的家常便饭,因为它计算效率极高,不会像拉格朗日法那样让矩阵变得异常复杂。
罚函数法的数学原理:
罚函数法将接触约束转化为一个弹簧力:
其中 `k` 是罚刚度(penalty stiffness)。这个刚度通常取为接触区域材料等效刚度的某个倍数。
关键参数的意义:
contact_prop.NormalBehavior( pressureOverclosure=HARD, constraintEnforcementMethod=PENALTY, allowSeparation=ON, # 高级参数(通常不需要手动设置) contactStiffness=1.0, # 罚刚度比例因子 contactDamping=0.0, # 接触阻尼 contactControl='default' # 接触控制)
罚函数法的完整代码示例:
from abaqus import mdbfrom abaqusConstants import HARD, PENALTY, EXPLICIT_DEFAULTmodel = mdb.models['Impact-Model']# 创建接触属性(用于显式动力学分析)contact_prop = model.ContactProperty('Impact-Contact')# 罚函数法接触contact_prop.NormalBehavior( pressureOverclosure=HARD, constraintEnforcementMethod=PENALTY, allowSeparation=ON, # 显式分析的典型设置 contactStiffness=2.0, # 较高的罚刚度 contactDamping=0.05 # 少量阻尼帮助稳定)# 对于高速冲击问题,可以添加粘性压力contact_prop.ContactDamping( dampingCoefficient=0.1, dampingType=RELATIVE)
罚函数法的典型应用场景:
✅ 适合使用罚函数法的情况:
显式动力学分析(Abaqus/Explicit)
高速冲击、碰撞问题
大变形、大滑移接触
复杂的多体接触系统
网格质量不一致的接触对
❌ 不建议使用罚函数法的情况:
allowSeparation 参数详解:
# 允许分离(大多数情况下的正确选择)contact_prop.NormalBehavior( pressureOverclosure=HARD, allowSeparation=ON # ✅ 接触后可以分开)# 不允许分离(特殊场景使用)contact_prop.NormalBehavior( pressureOverclosure=HARD, allowSeparation=OFF # ⚠️ 接触后永远粘在一起)
注意那个 `allowSeparation=ON`。 如果你手抖写成了 OFF,那你的模型就会变成"一碰就粘死",这在模拟焊接或粘胶时很有用,但如果你是在做齿轮啮合,那就等着模型扭成麻花吧!
高级技巧:混合使用多种接触行为
在复杂模型中,可以为不同的接触对使用不同的法向行为:
def create_multi_contact_model(model_name): """ 创建包含多种接触行为的复杂模型 """ from abaqus import mdb from abaqusConstants import HARD, EXPONENTIAL, PENALTY model = mdb.models[model_name] # 1. 齿轮啮合区域:硬接触 + 罚函数法 gear_prop = model.ContactProperty('Gear-Contact') gear_prop.NormalBehavior( pressureOverclosure=HARD, constraintEnforcementMethod=PENALTY, allowSeparation=ON ) # 2. 密封圈区域:指数软接触 seal_prop = model.ContactProperty('Seal-Contact') seal_prop.NormalBehavior( pressureOverclosure=EXPONENTIAL, pressure=0.5e6, clearance=0.2, allowSeparation=ON ) # 3. 焊接区域:硬接触 + 不允许分离 weld_prop = model.ContactProperty('Weld-Contact') weld_prop.NormalBehavior( pressureOverclosure=HARD, allowSeparation=OFF # 焊接后不分离 ) print("多区域接触属性已创建") print(" - 齿轮接触:硬接触 + 罚函数法") print(" - 密封接触:指数软接触") print(" - 焊接接触:硬接触 + 无分离") return gear_prop, seal_prop, weld_prop
在 Abaqus 脚本建模中,选择合适的法向接触行为是成功的关键一步。
最佳实践清单:
调试接触问题的"三板斧":
1. 第一板斧:检查接触定义
确认主从面选择正确(主面应该更刚硬、网格更粗)
检查初始间隙是否合理
验证接触属性是否正确分配
2. 第二板斧:调整法向行为
3. 第三板斧:优化求解设置
减小初始增量步
启用自动稳定(stabilization)
调整收敛容差
在 Abaqus 脚本建模中:
追求极度精确、网格质量好?选 HARD + Direct。
模型总是不收敛、报错退化?试试 EXPONENTIAL。
做大变形、高速碰撞?PENALTY 是你的不二之选。
代码本身没有温度,但你赋予它的参数,决定了它在虚拟世界里是坚如磐石,还是温润如玉。
👉互动话题:在你的仿真经历中,有没有遇到过"接触面互相穿透得亲妈都不认识"的情况?或者被"不收敛"折磨到想砸电脑?在评论区留下你的经历,我们一起在代码里寻找避坑指南!





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
