小白也能懂—CAN总线:Linux SocketCAN框架
- 2026-07-03 22:07:42
大家好,我是快乐学习,开心分享的科技探索员 🎉
上一期我们把 CAN 总线的硬件原理搞透了——差分信号、帧格式、仲裁、错误处理。这一期进入软件世界:Linux 是怎么支持 CAN 总线的?
答案是 SocketCAN。这是Linux 内核从 2.6.25 版本开始正式合入的 CAN 总线框架,它把 CAN 控制器抽象成一个网络设备——就像以太网网卡一样,用 ip 命令管理,用 socket 编程收发,甚至可以在不接硬件的情况下用虚拟接口 vcan0 测试代码。
SocketCAN 最聪明的设计决策:用 UNIX 网络套接字接口来统一所有 CAN 操作。这让每个 Linux 程序员都能无缝上手 CAN 开发,不需要学习全新的 API。
▍一、SocketCAN 的整体架构
在 Linux 里,CAN 总线的软件栈是这样分层的:
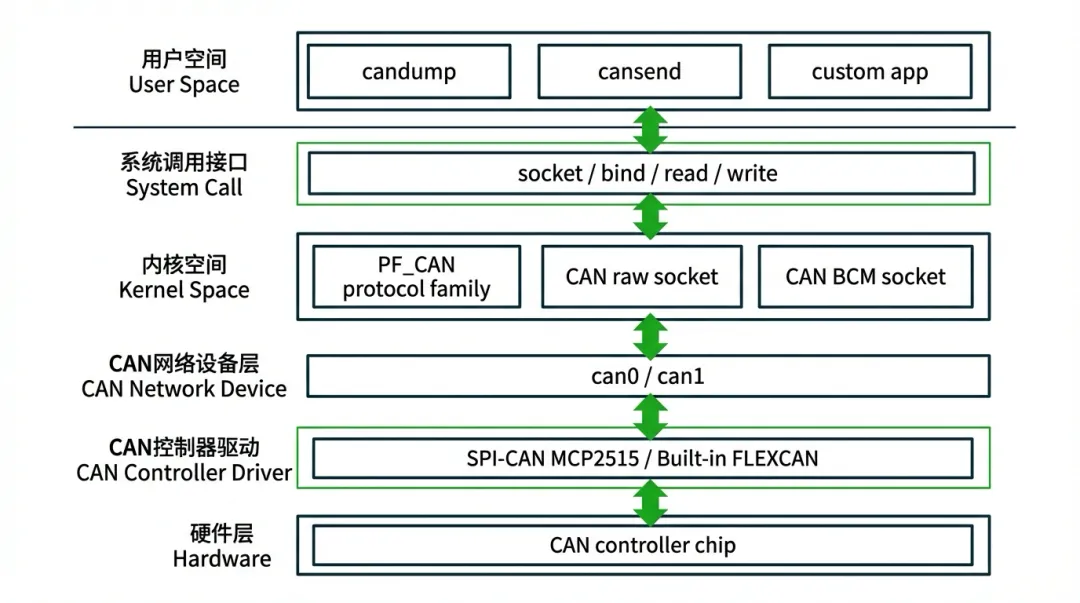
▲ Linux SocketCAN 软件架构——从用户空间应用到硬件驱动的完整分层模型
各层职责:
• 用户空间:应用程序(candump、cansend 或自己写的程序)通过标准的 socket 系统调用收发 CAN 帧
• PF_CAN 协议族:SocketCAN 注册的协议族(类比 PF_INET 是 TCP/IP 的协议族),实现 CAN RAW 套接字和 CAN BCM 套接字
• CAN 网络设备层:can0、can1 等网络接口,遵循 Linux net_device 框架,支持 ip link、ifconfig 等标准命令
• CAN 控制器驱动:具体硬件的驱动程序,向上提供统一的 net_device 接口(SPI 外接 MCP2515、或 SoC内置 FlexCAN 等)
• 硬件层:实际的 CAN 控制器芯片
💡 这种分层设计的最大好处:驱动工程师只需实现 net_device 接口;应用工程师只需会 socket 编程;两者完全解耦。换一块 CAN 硬件,应用代码一行不改。
▍二、两种套接字类型:RAW vs BCM
CAN RAW 套接字
最直接的访问方式,应用程序完全控制 CAN 帧的发送和接收,适合:
• 自定义协议(汽车私有 CAN 报文、自研设备通信)
• 总线监听与录制(类似网络抓包)
• 快速原型验证
CAN BCM 套接字(Broadcast Manager)
内核级的 CAN 报文调度引擎,把周期发送、滤波、超时检测等逻辑放在内核里完成,应用程序只需配置规则,适合:
• 周期报文:心跳帧每 10ms 自动发送一次,不占用用户空间 CPU
• 变化滤波:只在报文内容改变时才通知应用程序(数据监控利器)
• 超时检测:某个 ID 的报文超过100ms 没收到就触发告警
💡 判断用哪个:自己控制时序、写自定义协议 → RAW;周期收发、状态监控 → BCM。80% 的场景 RAW 就够了。
▍三、网络接口配置:ip link 命令详解
SocketCAN 接口和以太网接口的管理方式完全一样,都用 ip link 命令。
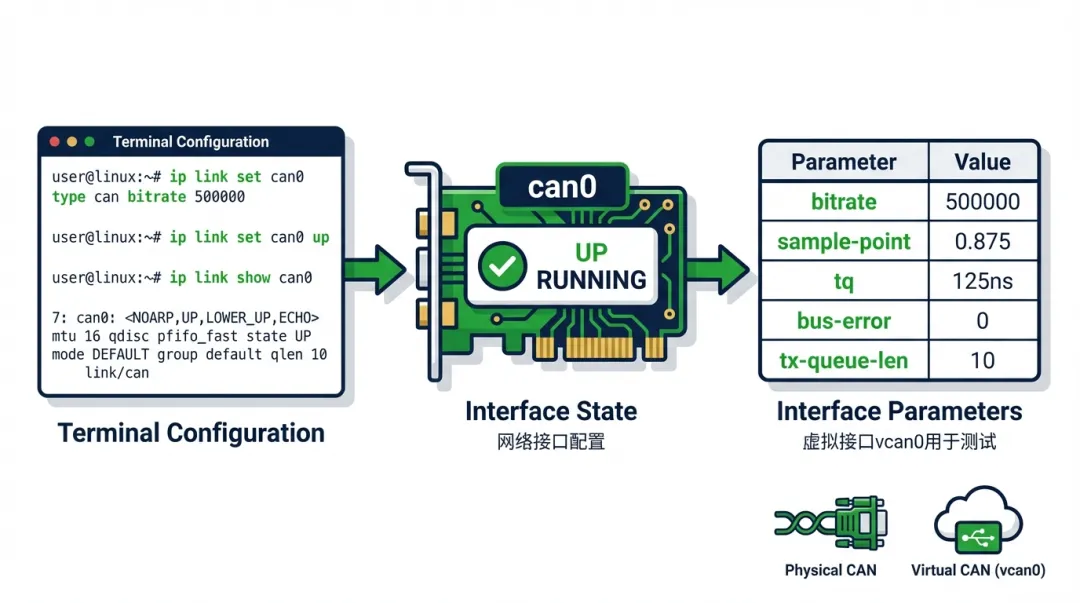
▲ ip link 配置 CAN接口——设置波特率、启动接口、查看接口状态的完整流程
物理 CAN 接口配置
基本三步走:
• 第一步 设置波特率:ip link set can0 type can bitrate 500000
• 第二步 启动接口:ip link set can0 up
• 第三步 确认状态:ip link show can0(看到 UP RUNNING 即成功)
常用配置参数:
• bitrate:波特率,常用 125000 / 250000 / 500000 / 1000000
• sample-point:采样点,默认 0.875,一般不需要修改
• loopback on/off:回环模式,自发自收,调试时很有用
• listen-only on/off:只听不说,总线监听、不干扰通信的必备选项
• restart-auto:Bus Off 后自动重启,适合线上生产环境
虚拟 CAN 接口 vcan0(无硬件也能测试)
不需要任何 CAN 硬件,直接在Linux 上创建虚拟接口:
• 加载内核模块:modprobe vcan
• 创建虚拟接口:ip link add dev vcan0 type vcan
• 启动接口:ip link set vcan0 up
vcan0 支持所有 SocketCAN 操作,是开发和单元测试的利器。
⚠️ 物理 CAN 接口在使用前必须先设置波特率,不然 ip link set up 会失败。且总线上所有节点的波特率必须完全一致,哪怕只差 1Kbps 也会导致通信错误。
▍四、can-utils 工具链:CAN 调试必备
安装一行命令:apt install can-utils(Ubuntu/Debian),然后就拥有了一套完整的 CAN 调试工具集。
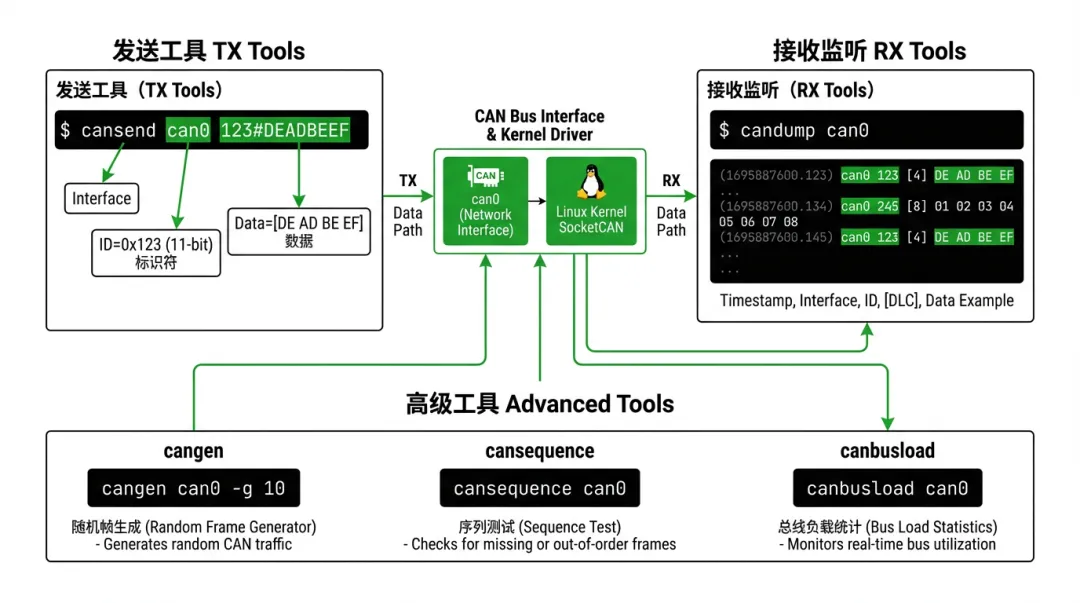
▲ can-utils 工具链全景——发送、接收、压力测试一套工具搞定 CAN 总线调试
最常用的 6 个命令
• candump can0:监听 can0 接口,打印所有收到的 CAN 帧(带时间戳)
• cansend can0 123#DEADBEEF:向 can0 发送一帧,ID=0x123,数据=DE AD BE EF
• cangen can0 -g 10:每 10ms 随机生成一帧发送,压力测试利器
• cansequence can0:发送序号递增的测试帧,验证帧是否丢失
• canbusload can0 500000:实时计算总线负载百分比(带宽利用率)
• canplayer -I candump.log can0:回放之前candump 录制的报文,复现现场
💡 调试黄金组合:一个终端跑 candump can0 -l 录制到文件,另一个终端用 cansend 发测试帧。发现问题后用 canplayer 回放,精准复现,再配合代码逐步定位。
▍五、Socket 编程基础:用 C 语言收发 CAN 帧
SocketCAN 的 API 和 TCP/UDP socket 如出一辙,区别只是:地址族用 AF_CAN,套接字类型用 SOCK_RAW,协议用 CAN_RAW。
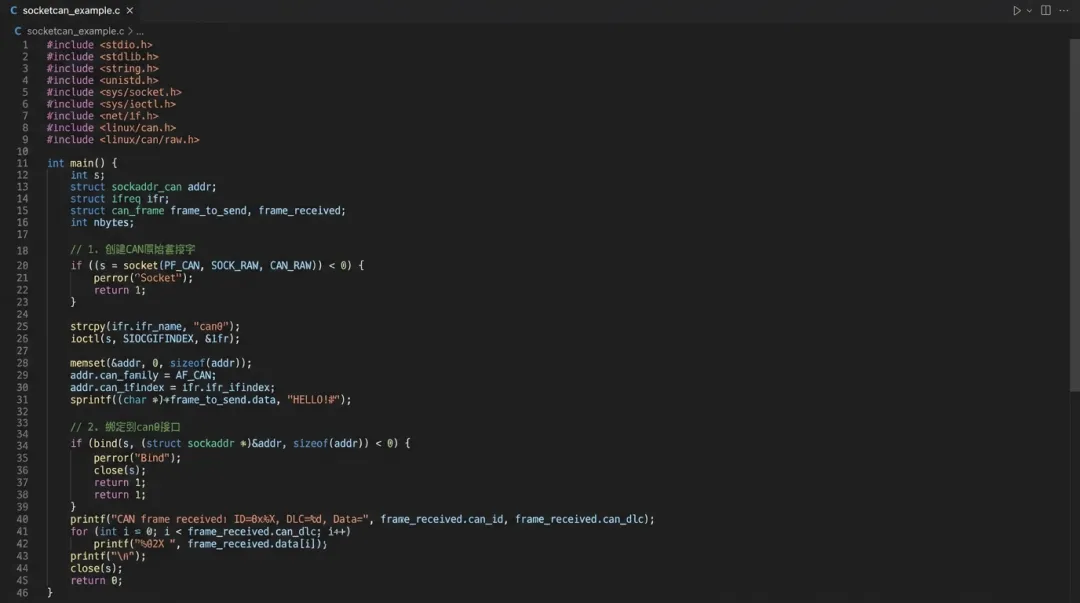
▲ SocketCAN 最小编程示例——5个关键步骤:创建套接字、绑定接口、构造帧、发送、接收
关键数据结构:struct can_frame
• can_id:CAN 帧 ID(标准帧 11 位,扩展帧 29 位,最高位为EFF 标志)
• can_dlc:数据长度,0~8 字节
• data[8]:实际数据,最多 8 字节
报文过滤:只接收你关心的 ID
默认情况下 RAW 套接字会收到总线上所有报文。实际应用中用 setsockopt 设置过滤规则:
• can_filter.can_id:要接收的 CAN ID
• can_filter.can_mask:掩码,1 表示该位必须匹配
• 设置完过滤后,只有匹配的帧才会进入 recv 队列,降低应用层 CPU 负载
⚠️ can_frame 中的 can_id 和帧格式中的 ID 含义相同,但有个细节:若发送扩展帧(29位ID),需要在 can_id 上或运算 CAN_EFF_FLAG(0x80000000),否则内核会按标准帧 11 位处理,导致发出的帧 ID 截断出错。
▍六、进阶:错误帧处理与 Bus Off 恢复
监听错误帧
默认 RAW 套接字不接收错误帧。通过setsockopt 开启 CAN_RAW_ERR_FILTER,可以接收内核上报的错误帧,错误帧的 can_id 最高位(CAN_ERR_FLAG = 0x20000000)为 1,data 字段包含具体错误类型:
• CAN_ERR_TX_TIMEOUT:发送超时
• CAN_ERR_BUSOFF:Bus Off 状态
• CAN_ERR_PROT:协议违规(位错误、填充错误等)
• CAN_ERR_CRTL:控制器错误(TX/RX 溢出等)
Bus Off 后自动恢复
两种方案:
• 硬件自动重启(推荐):配置接口时加 restart-auto,内核检测到 Bus Off 后自动恢复
• 手动重启:监听到 CAN_ERR_BUSOFF 错误帧后,ip link set can0 type can restart 触发恢复
💡 生产系统建议结合两种方案:配置 restart-auto 保证自动恢复,同时在代码里监听错误帧并打日志,方便事后排查通信问题根因。
▍七、总结:SocketCAN 知识速查
• 框架位置:Linux 2.6.25+ 内核原生支持,不需要额外安装
• 接口管理:ip link set can0 type can bitrate 500000 && ip link set can0 up
• 虚拟接口:modprobe vcan + ip link add vcan0 type vcan,无硬件可测试
• 调试工具:candump(监听)、cansend(发送)、cangen(压测)、canplayer(回放)
• RAW 套接字:socket(PF_CAN, SOCK_RAW, CAN_RAW),精确控制每一帧
• BCM 套接字:周期发送/变化滤波/超时检测,内核自动调度
• 错误处理:setsockopt 开启 CAN_RAW_ERR_FILTER,监听 Bus Off 和协议错误
下期预告 🔔
CAN总线:CAN总线驱动开发——从零写一个 Linux CAN 控制器驱动。 platform_driver 框架、中断处理、net_device 注册,带你看懂内核 MCP2515 驱动源码的每一行。
喜欢这篇文章?点个「在看」,让更多工程师看到它 👇
关注「科技探索员」,每期深入一个技术点,不讲玄学,只讲干货。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 零基础友好!4月科研培训项目:Python+SCI写作+智能体SciAgent搭建+OpenClaw实战,即将开启!
- Linux USB Gadget 高速通信驱动开发实战
- 6python之小程序基础问询优化及卡点处理
- 探索35个Python的常见函数
- AI自动化ESG数据采集:如何用Python从零搭建,效率提升10倍
- Python第一课 | 邂逅 Python,解锁编程世界的金钥匙
- 数学可以用Python 画图的方式教,一切数学都是图形
- 《码上仿真:Abaqus Python API》Vol.5 NormalBehavior 硬接触与软接触的“敲代码”秘籍
- OpenAI 买下了 Python 的包管理器,Anthropic 让 AI 住进了聊天软件
- OpenAI突然出手!收购Python最强基建,AI编程大战升级
