Linux设备驱动 -- DS18B20驱动编程
- 2026-07-03 20:57:53
Linux设备驱动 -- DS18B20驱动编程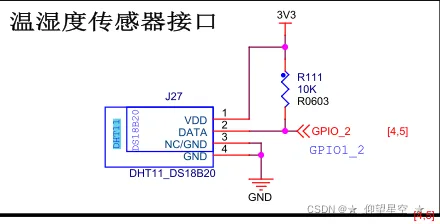
野火imx6ull开发板硬件接口
DS18B20是一款单总线的温度传感器。 每个总线上可以挂载多个DS18B20,每个DS18B20具备唯一的ID,所以可以根据ID选择访问的DS18B20 若只有一个DS18B20,则不需要选择ID
DS18B20的驱动流程
总流程:
启动温度转换 读取温度
启动温度转换流程:
发出Start信号 得到回应 发出8位的数据,用于选择某个DS18B20 发出温度转换命令 等待温度转换完毕
如何读取温度:
发出Start信号 得到回应 发出8位的数据,用于选择某个DS18B20 发出读暂存器的命令 读温度低8位 读温度高8位
DS18B20硬件时序信号
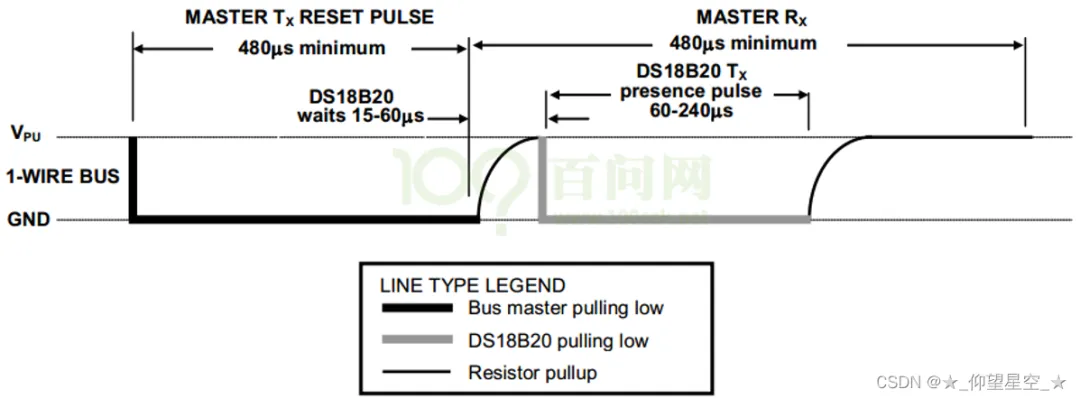
复位初始化时序
必须要拉低至少480us,这是复位信号; 然后拉高释放总线,等待15~60us之后, 若存在DS18B20,其会拉低总线60~240us表示DS18B20初始化复位成功。
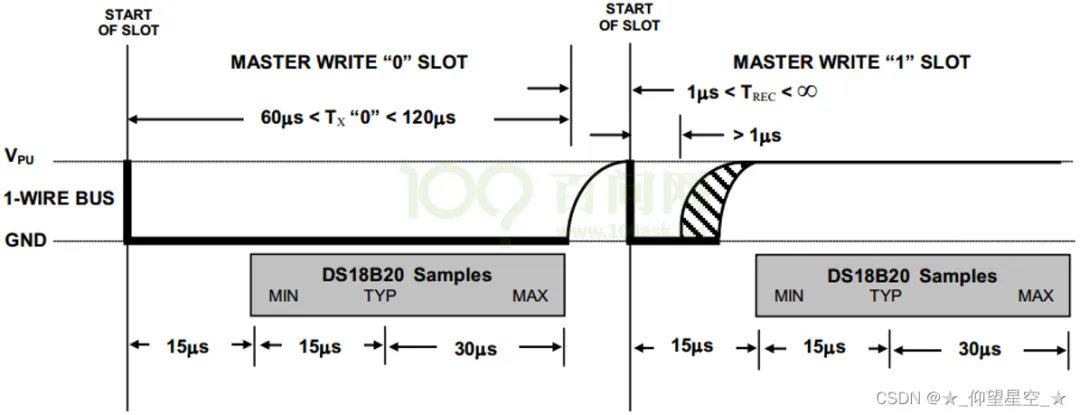
写一个bit时序
写0,拉低至少60us,写周期为60-120us 写1,拉低1us,写周期至少60us
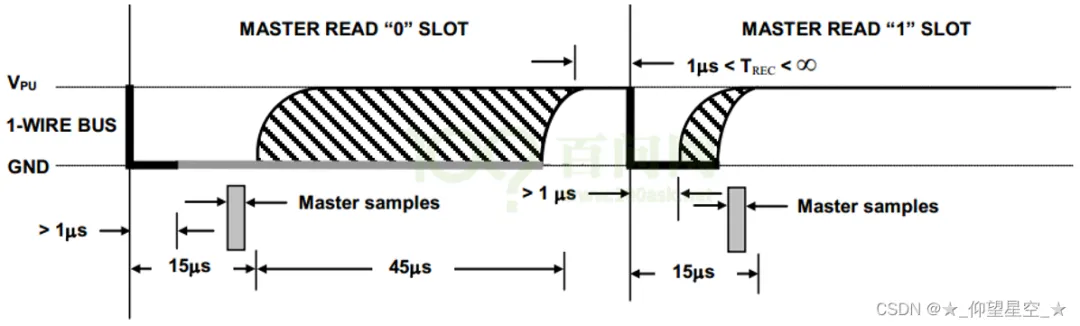
整个读周期需要在15us内完成 主机拉低总线至少1us,接着读取总线电平,为0表示读到的bit数据为0,若为1则表示读到数据是1
DS18B20驱动实现
设备树编写
根节点下添加节点:
ds18b20 { compatible = "xgj,ds18b20"; pinctrl-names = "default"; pinctrl-0 = <&pinctrl_ds18b20>; ds18b20-gpios = <&gpio1 2 GPIO_ACTIVE_HIGH>; status = "okay"; };在iomuxc节点添加DS18B20相关的pinctrl节点
/*ds18b20*/ pinctrl_ds18b20: ds18b20grp { fsl,pins = < MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x10b0 >; }; pinctrl节点可以不设置,因为imx6ull的引脚默认状态下一般都是GPIO功能。
设备树编译:
ares@ubuntu:~/work/ebf_linux_kernel-ebf_4.19.35_imx6ul$ cat make_dtb.sh#!/bin/shmake ARCH=arm -j4 CROSS_COMPILE=arm-linux-gnueabihf- dtbs将设备树拷贝系统目录:
debian@npi:~/nfs_root/driver$ cat cp_dtb_to_linux.sh#!/bin/shsudo cp imx6ull-mmc-npi.dtb /usr/lib/linux-image-4.19.35-carp-imx6//usr/lib/linux-image-4.19.35-carp-imx6/ ,系统存放设备树的目录
重启系统设备树生效:
sudo reboot驱动编写
DS18B20的驱动:
#define CMD_CONVERT_TEMP 0x44#define CMD_READ_DATA 0xBE#define CMD_SKIP_ROM_ID 0xCC#define CMD_MATCH_ROM_ID 0x55#define CMD_READ_ROM_ID 0x33#define CMD_SEARCH_ROM_ID 0xF0#define DS18B20_IO_OUT() gpio_direction_output(ds18b20_dev.gpio, 1)#define DS18B20_IO_IN() gpio_direction_input(ds18b20_dev.gpio)#define DS18B20_WRITE(bit) gpio_set_value(ds18b20_dev.gpio, bit)#define DS18B20_READ() gpio_get_value(ds18b20_dev.gpio)staticstructds18b20ds18b20_dev;/* ds18b20复位,既检测ds18b20是否存在 0 - ds18b20存在, 1 - ds18b20不存在 */staticintds18b20_reset(void){int ret = 1;unsignedlong flags; spin_lock_irqsave(&ds18b20_dev.lock, flags); DS18B20_IO_OUT(); /* 设置为输出 */ DS18B20_WRITE(0); udelay(480); /* udelay 延时可能不准 */ DS18B20_WRITE(1); udelay(75); DS18B20_IO_IN(); /* 设置为输入 */ ret = DS18B20_READ(); udelay(10); DS18B20_IO_OUT(); DS18B20_WRITE(1); /* 释放总线 */ spin_unlock_irqrestore(&ds18b20_dev.lock, flags);return ret;}staticvoid _ds18b20_write_bit(uint8_t bit) { DS18B20_IO_OUT(); /* 设置为输出 */ bit = bit > 1 ? 1 : bit; DS18B20_WRITE(0); udelay(1); DS18B20_WRITE(bit); udelay(60); /* 65 us */ DS18B20_WRITE(1); /* 释放总线 */ udelay(16);}/* 整个读周期最少需要60us,启动读开始信号后必须15us内读取IO电平,否则就会被上拉拉高 */staticuint8_t _ds18b20_read_bit(void){uint8_t bit; DS18B20_IO_OUT(); /* 设置为输出 */ DS18B20_WRITE(0); udelay(1); DS18B20_IO_IN(); /* 设置为输入 */ udelay(5); bit = DS18B20_READ(); /* 读取结果 */ udelay(55);return bit;}staticvoidds18b20_wrte_byte(uint8_t byte){int i;unsignedlong flags; spin_lock_irqsave(&ds18b20_dev.lock, flags);for (i = 0; i < 8; i++) {// _ds18b20_write_bit(byte & 0x01); //(byte >> i) & 0x01// byte = byte >> 1; _ds18b20_write_bit((byte >> i) & 0x01); } spin_unlock_irqrestore(&ds18b20_dev.lock, flags);}staticuint8_tds18b20_read_byte(void){int i;uint8_t bit;uint8_t byte = 0;unsignedlong flags; spin_lock_irqsave(&ds18b20_dev.lock, flags);for (i = 0; i < 8; i++) { bit = _ds18b20_read_bit();if (bit) byte |= (0x01 << i); } spin_unlock_irqrestore(&ds18b20_dev.lock, flags);return byte;} 这部分代码和Linux驱动框架完全没关系,跟单片机下的驱动DS18B20的代码没什么区别。
DS18B20的Linux驱动框架实现:
#include<linux/init.h>#include<linux/module.h>#include<linux/fs.h>#include<linux/cdev.h>#include<linux/uaccess.h>#include<linux/types.h>#include<linux/kernel.h>#include<linux/delay.h>#include<linux/ide.h>#include<linux/errno.h>#include<linux/gpio.h>#include<asm/mach/map.h>#include<linux/of.h>#include<linux/of_address.h>#include<linux/of_gpio.h>#include<asm/io.h>#include<linux/device.h>#include<linux/timer.h>// #include 驱动编译makefile
KERNEL_DIR = /home/ares/work/ebf_linux_kernel-ebf_4.19.35_imx6ulobj-m := ds18b20_drv.oall: $(MAKE) -C $(KERNEL_DIR) M=$(CURDIR) modules.PHONY:cleanclean: $(MAKE) -C $(KERNEL_DIR) M=$(CURDIR) clean执行命令make编译
测试程序编写
#include<sys/types.h>#include<sys/stat.h>#include<fcntl.h>#include<unistd.h>#include<stdio.h>#include<string.h>#include<sys/ioctl.h>#include<poll.h>#define DEV_NAME "/dev/ds18b20"voidsleep_ms(unsignedint ms){structtimevaldelay; delay.tv_sec = 0; delay.tv_usec = ms * 1000; select(0, NULL, NULL, NULL, &delay);}intmain(int argc, char **argv){int fd;int ret;structpollfdfds[1];/* 2. 打开文件 */ fd = open(DEV_NAME, O_RDWR); // | O_NONBLOCKif (fd < 0) {printf("can not open file %s, %d\n", DEV_NAME, fd);return-1; }short temp;while (1) {if ((ret = read(fd, &temp, sizeof(temp))) == sizeof(temp)) {float temperature = temp * 0.0625;printf("temp %f\r\n", temperature); }else {printf("not get temp, err %d\r\n", ret); } sleep_ms(10); }}float temperature = temp * 0.0625,根据DS18B20相关手册可知,获取到DS18B20寄存器中的数据还不是真正的温度,还需要乘以0.0625
安装执行:
sudo insmod ds18b20_drv.kosudo ./ds18b20_test
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Python:Scapy 网络交互与安全的工具库
- 搜Python下载,差点被骗300块——直到遇见这款真正免费的可视化开发工具
- AI基础学习笔记:Python中组合数据类型常用“字符串介绍”
- 利用Python脚本实现监控QMT持仓个股冲高回落卖出
- 如何在Linux上挂载WebDAV
- 1.20 Linux定时计划任务与日志管理
- 原来室友每天玩的不是星露谷而是Python!
- 数控编程也要学习Python?请看全球五轴数控加工深度分析报告四
- Reflex:一个纯 Python 库,让你前端后端一条龙搞定
- Python可视化天花板|wordcloud词云库,搭配jieba做出高颜值创意图!
