在有限元的世界里,定义两个零件相撞是常规操作,但定义一个零件"自摸"却需要一点高级技巧。
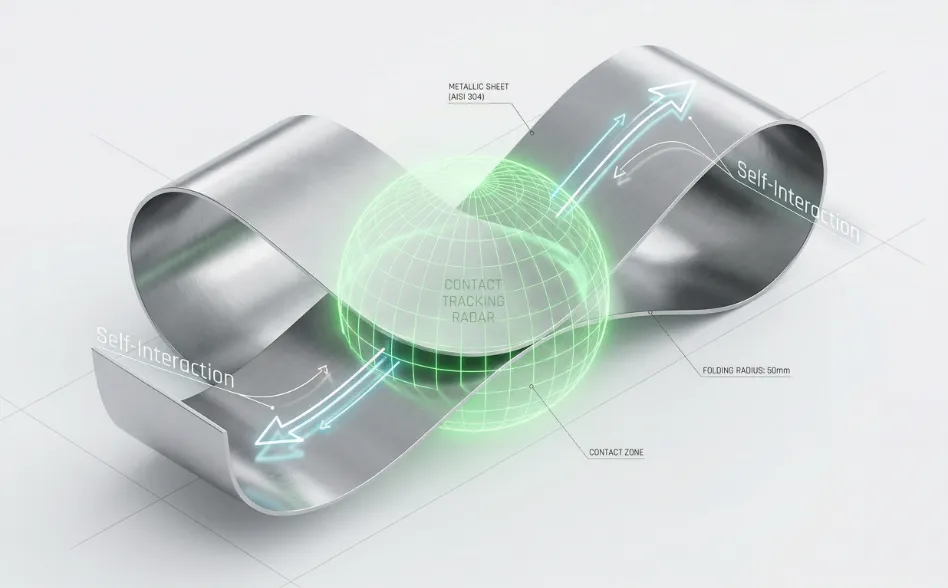
在大变形分析中,结构会扭曲到一种亲妈都不认识的程度。如果没有自接触防御系统,单元会直接穿过自己的脊背。在 Abaqus Python API 中,SelfContactStd(标准求解器)和 SelfContactExp(显式求解器)就是专门为这种"内卷"现象设计的雷达。
为什么需要自接触?
在工程实际中,许多场景都会遇到零件自身的接触问题:
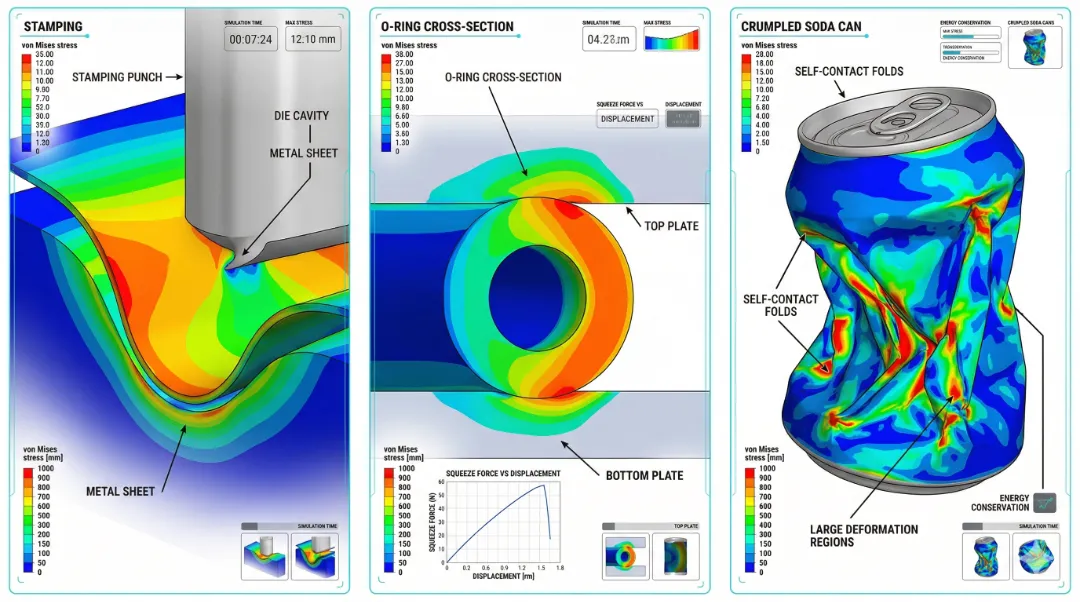
金属成形:薄板冲压时,材料褶皱后表面相互接触
橡胶密封:O型圈受压变形后,不同部位相互挤压
生物力学:血管支架扩张时,网状结构自接触
包装行业:易拉罐压扁、纸盒折叠时的自接触
地质力学:岩层褶皱、断层滑移时的自接触
没有自接触,这些仿真会出现什么后果?
单元相互穿透,产生非物理的变形
接触力计算错误,导致应力失真
收敛困难,计算中途报错退出
结果完全不可信,浪费计算资源
下面我们从自接触的三个核心维度来理解其在仿真中的应用。
1. 识别"内卷"区域:Surface 对象的唯一性创建自接触时,路径是 `mdb.models[name].SelfContactStd`。与普通接触不同,它只需要一个 surface 参数。
普通接触像是"谈恋爱",得有两个对象(Master 和 Slave);自接触则是"练瑜伽",对象只有你自己。你需要用脚本定义一个包含可能发生重叠的所有表面的集合,告诉 Abaqus:"在这个区域内,严禁自我穿透!"
自接触表面的创建方法:
在定义自接触之前,首先需要创建一个包含所有可能自接触区域的表面:
from abaqus import *from abaqusConstants import *def create_robust_self_contact(model_name, part_name, interaction_step): model = mdb.models[model_name] part = model.parts[part_name] # 1. 稳健地选择所有面 (避免使用 Mask) # 对于自接触,我们通常直接传递所有的 faces 序列 all_faces = part.faces[:] # 2. 创建表面 (针对壳单元,建议不指定 side,或根据需要定义) surf_name = 'GeneralSelfSurf' if surf_name not in part.surfaces.keys(): # 注意:对于固体单元用 side1Faces;对于壳单元自接触,建议在 Interaction 中处理 part.Surface(name=surf_name, side1Faces=all_faces) # 3. 在 Assembly 中实例化并创建 Interaction # 自接触必须在 Interaction 模块(Step之后)定义 a = model.rootAssembly instance = a.instances[part_name + '-1'] # 创建接触属性 if 'SelfProp' not in model.contactProperties.keys(): contact_prop = model.ContactProperty('SelfProp') contact_prop.TangentialBehavior(formulation=PENALTY, table=((0.2, ), )) # 4. 建立自接触 model.SelfContactStd( name='Self-Yoga-Contact', createStepName=interaction_step, surface=instance.surfaces[surf_name], interactionProperty='SelfProp', thickness=ON, # 开启厚度补偿 contactTracking=TWO_CONFIG )# 调用示例# create_robust_self_contact('Tube-Model', 'Tube-Part', 'Step-1')
表面选择的策略:
1. 全表面策略:将整个零件的外表面都定义为自接触表面
优点:不会遗漏任何可能的自接触
缺点:计算开销大,可能包含大量不必要的接触检测
2. 局部表面策略:只选择可能发生自接触的局部区域
优点:计算效率高
缺点:需要预判变形模式,可能遗漏接触
3. 动态表面策略:根据分析步动态调整自接触区域
实战案例:橡胶密封圈自接触表面创建
from abaqus import *from abaqusConstants import *def create_seal_self_contact_surface(model_name, part_name, surface_name='SealSelfContact'): model = mdb.models[model_name] part = model.parts[part_name] all_faces = part.faces cylindrical_faces_indices = [] # 1. 真正的几何筛选(查找圆柱面) for i in range(len(all_faces)): face = all_faces[i] # 通过 getSurfaceType() 识别圆柱面 (CYLINDER) # 注意:在某些 CAD 导入模型中,旋转面可能被识别为 REVOLUTION if face.getSurfaceType() in (CYLINDER, REVOLUTION): cylindrical_faces_indices.append(i) # 如果没找到圆柱面,保险起见选所有面 if not cylindrical_faces_indices: target_faces = all_faces print("未识别到标准圆柱面,已选择所有表面作为备选。") else: # 根据索引切片获取面对象 target_faces = part.faces.getSequenceFromMask( mask=part.faces.getMaskFromString(cylindrical_faces_indices), ) # 2. 创建表面 # 对于自接触,side1Faces 适用于实心单元 if surface_name in part.surfaces.keys(): del part.surfaces[surface_name] part.Surface(name=surface_name, side1Faces=target_faces) print(f"密封圈自接触表面 '{surface_name}' 已就位!") print(f"识别到圆柱/旋转面共:{len(target_faces)} 个") return part.surfaces[surface_name]# 使用示例# create_seal_self_contact_surface('Seal-Model', 'O-Ring')
2. 内部导航系统:Contact Tracking(接触追踪)在 SelfContactStd 中,有一个关键成员 `contactTracking`。
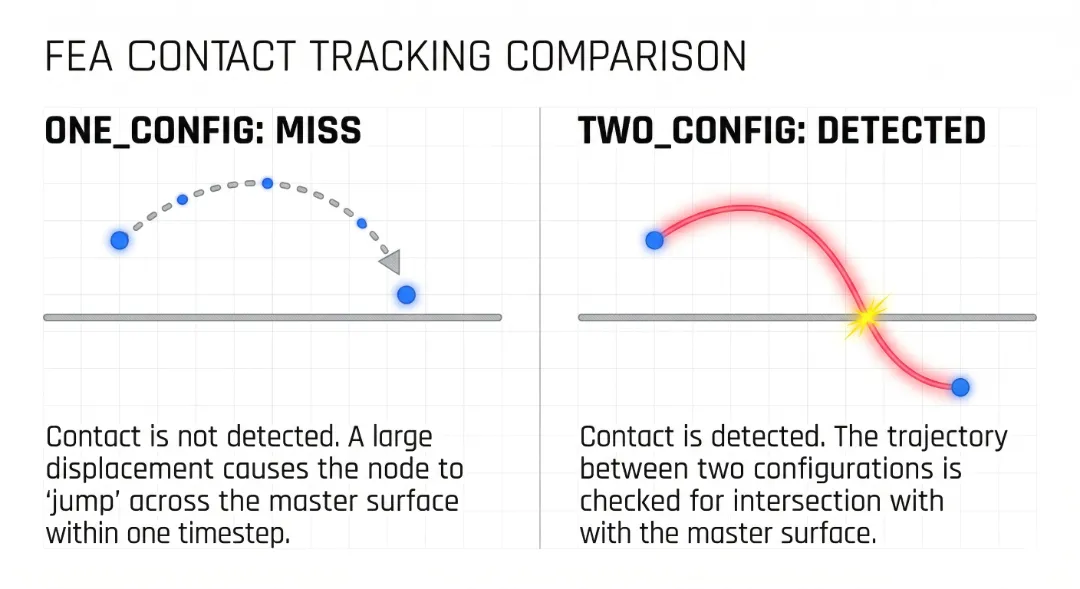
这是零件自带的"避障雷达"。ONE\_CONFIG 像是个近视眼,只看对面有没有撞上来;而 TWO\_CONFIG 则是全方位雷达,它会记录表面运动的轨迹,防止在剧烈折叠时因为速度太快而错过了"拦截"时机。
什么时候选择 ONE\_CONFIG?
什么时候选择 TWO\_CONFIG?
大变形、高度非线性
快速折叠或卷曲
最终精度要求高
标准求解器的推荐设置
接触追踪的数学原理:
ONE\_CONFIG 只在当前时间步检查接触状态:如果 distance(node, surface) < tolerance , 施加接触约束
TWO\_CONFIG 会考虑从上一时间步到当前时间步的运动轨迹:如果 trajectory(node, t_n → t_{n+1}) 与 surface 相交 , 施加接触约束 计算精确的接触时间和位置
代码示例:根据场景选择追踪模式
from abaqus import *from abaqusConstants import *def create_self_contact_with_tracking(model_name, inst_name, surf_name, tracking_mode=TWO_CONFIG): model = mdb.models[model_name] a = model.rootAssembly # 1. 确保接触属性存在 (防崩溃保险) prop_name = 'SelfContactProp' if prop_name not in model.contactProperties.keys(): model.ContactProperty(prop_name) model.contactProperties[prop_name].TangentialBehavior(formulation=PENALTY, table=((0.2, ), )) # 2. 获取正确的表面对象 # 注意:自接触表面必须从 Assembly 实例中获取 surface_obj = a.instances[inst_name].surfaces[surf_name] # 3. 动态命名,防止重复报错 interaction_name = 'SelfContact-' + inst_name model.SelfContactStd( name=interaction_name, createStepName='Step-1', surface=surface_obj, interactionProperty=prop_name, enforcement=SURFACE_TO_SURFACE, contactTracking=tracking_mode, thickness=ON ) print(f"自接触 '{interaction_name}' 已激活!模式:{tracking_mode}")# 调用示例# create_self_contact_with_tracking('Large-Deform', 'Tube-1', 'OuterSurf')
3. 隐形的防御层:Thickness(厚度补偿)在模拟壳(Shell)或膜(Membrane)单元时,几何上它们只有一层面,但物理上是有厚度的。
这就像是你穿了一件隐形的羽绒服。虽然看起来你只是一张纸,但代码会在计算时自动为你加上厚度。如果不开启这个 API 开关,两个表面会贴得太近,导致物理上的干涉被忽略,结果就是误差漫天飞。
开启 `thickness=ON` 后,Abaqus 会:
1. 将几何中面向外偏移半个厚度
2. 在偏移后的表面上进行接触检测
3. 计算接触力时考虑厚度影响
实战案例:薄壁管屈曲分析
from abaqus import *from abaqusConstants import *def setup_tube_buckling_self_contact(model_name, part_name, inst_name): model = mdb.models[model_name] part = model.parts[part_name] a = model.rootAssembly # 1. 创建壳截面 (确保材料 Steel 已存在) if 'Steel' not in model.materials.keys(): model.Material(name='Steel') model.materials['Steel'].Elastic(table=((210000.0, 0.3), )) shell_thickness = 2.0 model.HomogeneousShellSection( name='TubeSection', material='Steel', thickness=shell_thickness ) # 2. 分配截面 region = part.Set(name='AllFaces', faces=part.faces) part.SectionAssignment(region=region, sectionName='TubeSection') # 3. 创建表面 (在 Part 层级创建,但在 Assembly 层级引用) surf_name = 'TubeSurface' if surf_name not in part.surfaces.keys(): part.Surface(name=surf_name, side1Faces=part.faces) # 4. 创建接触属性 prop_name = 'TubeSelfContact' if prop_name not in model.contactProperties.keys(): cp = model.ContactProperty(prop_name) cp.NormalBehavior(pressureOverclosure=HARD, allowSeparation=ON) # 5. 在装配体层级创建自接触 (核心修正) # 获取实例化的表面对象 instance_surface = a.instances[inst_name].surfaces[surf_name] # 确保分析步已存在 step_name = 'Buckling-Step' if step_name not in model.steps.keys(): model.StaticStep(name=step_name, previous='Initial') model.SelfContactStd( name='TubeSelfContactInteraction', createStepName=step_name, surface=instance_surface, interactionProperty=prop_name, enforcement=SURFACE_TO_SURFACE, contactTracking=TWO_CONFIG, thickness=ON # 开启厚度补偿,防御自穿透 ) print(f" 薄壁管自接触系统已就绪!") print(f" 追踪模式:TWO_CONFIG (路径追踪)") print(f" 物理厚度:{shell_thickness} mm (已考虑补偿)")# 调用示例# setup_tube_buckling_self_contact('Tube-Buckling', 'Tube-Part', 'Tube-Part-1')
厚度补偿的注意事项:
1. 厚度方向:确保壳单元的法向方向一致(使用 `Normal` 命令检查)
2. 厚度值:必须与截面定义中的厚度一致
3. 双面接触:对于壳单元,可能需要同时考虑 side1 和 side2
4. 网格质量:厚度补偿对网格质量敏感,避免极端长宽比
在 Python 脚本中实现自接触:
from abaqus import *from abaqusConstants import *# 1. 选定那个要"内卷"的表面# 假设我们已经创建了一个名为 'InternalSurf' 的 Region 对象mySurface = mdb.models['Model-1'].parts['Tube'].surfaces['InternalSurf']# 2. 定义自接触# enforcement=SURFACE_TO_SURFACE: 推荐使用面面接触,更平滑mdb.models['Model-1'].SelfContactStd( name='SelfGuard', createStepName='Step-1', surface=mySurface, interactionProperty='MyContactProp', # 引用之前定义的 NormalBehavior enforcement=SURFACE_TO_SURFACE, contactTracking=TWO_CONFIG, thickness=ON)
自接触非常耗费算力!不要给整个模型都加自接触,只给那些真正会"抱团"的区域定义。
完整的多场景自接触设置:
from abaqus import *from abaqusConstants import *def setup_perfect_self_contact(): # --- 场景 1:金属薄板冲压 (壳单元 + 厚度补偿) --- def setup_sheet_forming(): m_name = 'SheetMetal-Forming' model = mdb.Model(name=m_name) # 1. 创建零件与表面 s = model.ConstrainedSketch(name='__profile__', sheetSize=200.0) s.rectangle(point1=(0.0, 0.0), point2=(100.0, 100.0)) p = model.Part(name='Sheet', dimensionality=THREE_D, type=DEFORMABLE_BODY) p.BaseShell(sketch=s) p.Surface(name='SheetSurf', side1Faces=p.faces) # 2. 【核心修正】创建装配体实例 a = model.rootAssembly inst = a.Instance(name='Sheet-1', part=p, dependent=ON) # 3. 【核心修正】创建分析步 model.StaticStep(name='Forming-Step', previous='Initial') # 4. 创建属性与自接触 prop = model.ContactProperty('SheetContact') prop.NormalBehavior(pressureOverclosure=HARD) prop.TangentialBehavior(formulation=PENALTY, table=((0.1, ), )) # 引用 Assembly 层级的表面 model.SelfContactStd( name='SheetSelfContact', createStepName='Forming-Step', surface=inst.surfaces['SheetSurf'], # 正确引用路径 interactionProperty='SheetContact', thickness=ON # 壳单元必须开启! ) print(" 场景 1:金属薄板冲压设置完成") # --- 场景 2:橡胶密封圈 (实体单元 + 软接触) --- def setup_rubber_seal(): m_name = 'Rubber-Seal' model = mdb.Model(name=m_name) # 1. 零件与装配 (简化版圆环) s = model.ConstrainedSketch(name='__profile__', sheetSize=50.0) s.CircleByCenterPerimeter(center=(0.0, 0.0), point1=(10.0, 0.0)) p = model.Part(name='O-Ring', dimensionality=THREE_D, type=DEFORMABLE_BODY) p.BaseSolidExtrude(sketch=s, depth=5.0) p.Surface(name='SealSurf', side1Faces=p.faces) a = model.rootAssembly inst = a.Instance(name='O-Ring-1', part=p, dependent=ON) model.StaticStep(name='Compression-Step', previous='Initial') # 2. 软接触属性:防止数值震荡 prop = model.ContactProperty('SealContact') prop.NormalBehavior(pressureOverclosure=EXPONENTIAL, pressure=0.5, clearance=0.01) # 3. 自接触 model.SelfContactStd( name='SealSelfContact', createStepName='Compression-Step', surface=inst.surfaces['SealSurf'], interactionProperty='SealContact', thickness=OFF # 实体单元不需要补偿 ) print(" 场景 2:橡胶密封圈设置完成") # 执行场景 setup_sheet_forming() setup_rubber_seal()# 运行setup_perfect_self_contact()
自接触性能优化技巧:
from abaqus import *from abaqusConstants import *def optimize_self_contact_performance(model_name, interaction_name='SelfContact'): if model_name not in mdb.models: print(f"错误:模型 {model_name} 不存在") return model = mdb.models[model_name] # 1. 创建接触控制 (Contact Control) # 重点:修正 stiffnessScaleFactor 和稳定化参数 control_name = 'SelfContactControl' if control_name not in model.contactControls.keys(): model.ContactControl(name=control_name) model.contactControls[control_name].setValues( stiffnessScaleFactor=0.1, # 降刚度,防止因接触力过大导致振荡 relativePenetrationTolerance=0.01, # 设置相对穿透容差 stabilize=ON, # 开启接触稳定化(防止零件飞走) stabilizationFactor=1.0 # 稳定化系数 ) # 2. 应用到自接触 if interaction_name in model.interactions.keys(): model.interactions[interaction_name].setValues( contactControls=control_name ) else: print(f"警告:找不到交互 {interaction_name}") # 3. 优化所有非线性分析步 for step_name in model.steps.keys(): if step_name != 'Initial': step = model.steps[step_name] # 只有 StaticStep 或类似步支持这些参数 try: step.setValues( initialInc=0.001, # 更小的初始增量,有助于初期接触捕捉 minInc=1e-08, # 给予求解器更多的试错空间 maxInc=0.1, # 限制最大步长,防止错过接触瞬间 maxNumInc=1000 # 增加最大增量数 ) except: pass print(f"优化方案已部署:'{interaction_name}' !")# 使用示例# optimize_self_contact_performance('SheetMetal-Forming', 'SheetSelfContact')
SelfContact 设置检查清单:
自接触最佳实践:
从简单开始:先尝试不加自接触,观察变形模式
局部优先:只给真正需要自接触的区域定义
逐步调试:先用粗网格、大增量步测试
监控收敛:关注接触状态和穿透量输出
结果验证:检查应力分布是否合理
性能优化建议:
在 Abaqus 脚本建模中,自接触是处理极度非线性问题的最后一道防线。
一个完美的模型不仅要处理好外部的冲突,更要管理好内部的秩序。通过 `contactTracking` 和 `thickness` 的精准调校,我们可以让模型在最极端的挤压下依然保持尊严(不穿透)。
👉互动话题:你见过最离谱的"自穿透"现场是什么样的?是密封圈变成了麻花,还是压扁的易拉罐变成了二次元薄片?在评论区留下你的"仿真翻车现场"。