Python 实现中国邮递员问题:从理论到动态可视化
- 2026-07-04 02:02:45
Python 实现中国邮递员问题:从理论到动态可视化
图与网络 | 中国邮递员问题(CPP)Python 完整实现(含动态可视化)
中国邮递员问题(Chinese Postman Problem, CPP)是图论与网络优化中最经典的路径规划问题,由我国数学家管梅谷先生在 1960 年首次提出,并给出奇偶点图上作业法,该问题被国际学术界统一命名为 “中国邮递员问题”。
本文 用 Python 完整实现中国邮递员问题的求解,包含核心算法、代码注释、运行结果与动态可视化,可直接用于物流配送、路线巡检等工程场景。
unsetunset一、问题定义unsetunset
一名邮递员从邮局出发,必须走完辖区内所有街道至少一次,最终返回邮局,要求规划出总路程最短的行走路线。
用图论语言描述: 给定一个无向连通带权图,其中:
:顶点(街道交叉口 / 邮局)
:边(街道)
:边权(街道长度)
目标:找到一条闭合回路,遍历图中所有边至少一次,且总权值最小。
unsetunset二、核心算法原理(奇偶点图上作业法)unsetunset
中国邮递员问题的最优解,核心围绕欧拉回路展开:
欧拉回路存在条件:图中所有顶点的度数均为偶数,此时直接遍历欧拉回路即为最优解(无重复边)。
奇度顶点处理:若图中存在奇数个奇度顶点(必为偶数个),需将奇度顶点两两配对,并添加配对顶点间的最短路径(即重复行走对应街道),使所有顶点度数变为偶数。
最优原则:配对的总路径权值最小,最终得到的欧拉图的欧拉回路即为最优路线。
标准求解步骤
找出图中所有奇度顶点;
对奇度顶点做最小权完美匹配;
将匹配路径的边复制到原图,构造欧拉图;
用 Hierholzer 算法求解欧拉图的欧拉回路,即最优路线。
unsetunset三、Python 实现(完整可运行)unsetunset
1. 依赖库安装
pip install networkx matplotlibheapq:堆优化 Dijkstra 最短路径networkx:图论算法(最小权完美匹配)matplotlib:静态绘图 + 动态动画可视化
2. 完整代码
import heapqimport randomimport networkx as nximport matplotlib.pyplot as pltfrom matplotlib.animation import FuncAnimationfrom collections import defaultdict# ===================== 配置参数 =====================CONFIG = {"mode": "manual", # 手动/随机地图"nodes": 6, # 随机图节点数"edge_density": 0.4, # 边密度"weight_range": (1, 10), # 边权范围# 手动定义地图 (u, v, 权重)"manual_edges": [(0, 1, 1), (0, 2, 2), (1, 2, 3), (1, 3, 1), (2, 3, 2)],"speed": 800, # 动画速度"seed": 42# 随机种子}# ===================== 1. Dijkstra最短路径 =====================defshortest_path(graph, start, end): dist = {node: float('inf') for node in graph} dist[start] = 0 prev = {node: Nonefor node in graph} heap = [(0, start)]while heap: d, u = heapq.heappop(heap)if d > dist[u]:continueif u == end:breakfor v, w in graph[u]: nd = d + wif nd < dist[v]: dist[v] = nd prev[v] = u heapq.heappush(heap, (nd, v))# 重构路径 path = [] cur = endwhile cur isnotNone: path.append(cur) cur = prev[cur]return path[::-1], dist[end]# ===================== 2. 提取奇度顶点 =====================defget_odd_nodes(graph):return [node for node, adj in graph.items() if len(adj) % 2 != 0]# ===================== 3. 最小权完美匹配 =====================defmin_matching(graph, odd_nodes):if len(odd_nodes) <= 1:return []# 构建奇度顶点完全图 complete_G = nx.Graph()for i in range(len(odd_nodes)):for j in range(i+1, len(odd_nodes)): u, v = odd_nodes[i], odd_nodes[j] _, d = shortest_path(graph, u, v) complete_G.add_edge(u, v, weight=d)# 最小权完美匹配 matching = nx.algorithms.matching.min_weight_matching(complete_G)# 转换为原始图最短路径 match_paths = []for u, v in matching: path, _ = shortest_path(graph, u, v) match_paths.append(path)return match_paths# ===================== 4. 构造欧拉图 =====================defbuild_euler_graph(origin_graph, edges, match_paths): euler_g = defaultdict(list)# 添加原始边for u, v, w in edges: euler_g[u].append((v, w)) euler_g[v].append((u, w))# 复制匹配路径边for path in match_paths:for i in range(len(path)-1): u, v = path[i], path[i+1] w = next(wt for nb, wt in origin_graph[u] if nb == v) euler_g[u].append((v, w)) euler_g[v].append((u, w))return euler_g# ===================== 5. Hierholzer算法求欧拉回路 =====================defeuler_tour(euler_graph, start=None):ifnot euler_graph:return [] start = start or next(iter(euler_graph.keys())) stack, tour = [start], [] eg = {u: list(adj) for u, adj in euler_graph.items()}while stack: cur = stack[-1]if eg.get(cur): nxt, _ = eg[cur].pop()# 删除反向边for i, (nb, w) in enumerate(eg[nxt]):if nb == cur:del eg[nxt][i]break stack.append(nxt)else: tour.append(stack.pop())return tour[::-1]# ===================== 随机图生成 =====================defgenerate_random_graph(n, density, weight, seed=None):if seed: random.seed(seed) edges = set() nodes = list(range(n))# 生成树保证连通for i in range(1, n): u, v = nodes[i-1], nodes[i] edges.add((min(u, v), max(u, v), random.randint(*weight)))# 补充随机边 max_e = n*(n-1)//2 target = int(density * max_e)while len(edges) < target: u, v = random.sample(nodes, 2) u, v = sorted((u, v))if (u, v) notin [(a,b) for a,b,_ in edges]: edges.add((u, v, random.randint(*weight)))# 构建邻接表 graph = defaultdict(list)for u, v, w in edges: graph[u].append((v, w)) graph[v].append((u, w))return list(edges), graph# ===================== 主程序 =====================if __name__ == "__main__":# 1. 构建图if CONFIG["mode"] == "random": edges, graph = generate_random_graph( CONFIG["nodes"], CONFIG["edge_density"], CONFIG["weight_range"], CONFIG["seed"] )else: edges = CONFIG["manual_edges"] graph = defaultdict(list)for u, v, w in edges: graph[u].append((v, w)) graph[v].append((u, w))# 节点标签 node_label = {i: chr(ord('A')+i) for i in range(len(graph))}for i in range(26, len(graph)): node_label[i] = str(i)# 2. 中国邮递员算法 odd_nodes = get_odd_nodes(graph) print("奇度顶点:", [node_label[n] for n in odd_nodes]) match_paths = min_matching(graph, odd_nodes) print("最小权匹配路径:")for p in match_paths: print(" → ".join(node_label[n] for n in p)) euler_g = build_euler_graph(graph, edges, match_paths) best_route = euler_tour(euler_g)# 计算总路程 weight = {(u,v):w for u,v,w in edges} weight.update({(v,u):w for u,v,w in edges}) total_len = sum(weight[(a,b)] for a,b in zip(best_route, best_route[1:])) print("\n最优路线:", " → ".join(node_label[n] for n in best_route)) print("最短总路程:", total_len)# 3. 可视化 plt.rcParams["font.sans-serif"] = ["SimHei"] fig, ax = plt.subplots(figsize=(8, 8)) G = nx.Graph([(u,v) for u,v,_ in edges]) pos = nx.spring_layout(G, seed=CONFIG["seed"])# 绘制底图 nx.draw_networkx_nodes(G, pos, node_color="skyblue", node_size=1800) nx.draw_networkx_labels(G, pos, node_label, font_size=16) nx.draw_networkx_edges(G, pos, edge_color="gray", width=2, alpha=0.6) nx.draw_networkx_edge_labels(G, pos, {(u,v):w for u,v,w in edges})# 标记重复边(红色虚线) added_edges = {(min(u,v), max(u,v)) for p in match_paths for u,v in zip(p,p[1:])} nx.draw_networkx_edges(G, pos, edgelist=list(added_edges), edge_color="red", style="--", width=2)# 动画元素 route_line, = ax.plot([], [], "r-", lw=4) current_dot, = ax.plot([], [], "ro", markersize=14) info_text = ax.text(0.02, 0.95, "", transform=ax.transAxes, bbox=dict(facecolor="white", alpha=0.7)) ax.set_title("中国邮递员问题 动态演示", fontsize=16) ax.axis("off") path_edges = list(zip(best_route, best_route[1:]))defupdate(frame): x, y = [], [] current = best_route[frame+1] total = 0for i in range(frame+1): a, b = path_edges[i] total += weight[(a,b)] x += [pos[a][0], pos[b][0], None] y += [pos[a][1], pos[b][1], None] route_line.set_data(x, y) current_dot.set_data([pos[current][0]], [pos[current][1]]) info_text.set_text(f"路线:{'→'.join(node_label[n] for n in best_route[:frame+2])}\n已走路程:{total}")return route_line, current_dot, info_text ani = FuncAnimation(fig, update, frames=len(path_edges), interval=CONFIG["speed"]) plt.tight_layout() plt.show()unsetunset
四、运行结果unsetunset
1. 控制台输出
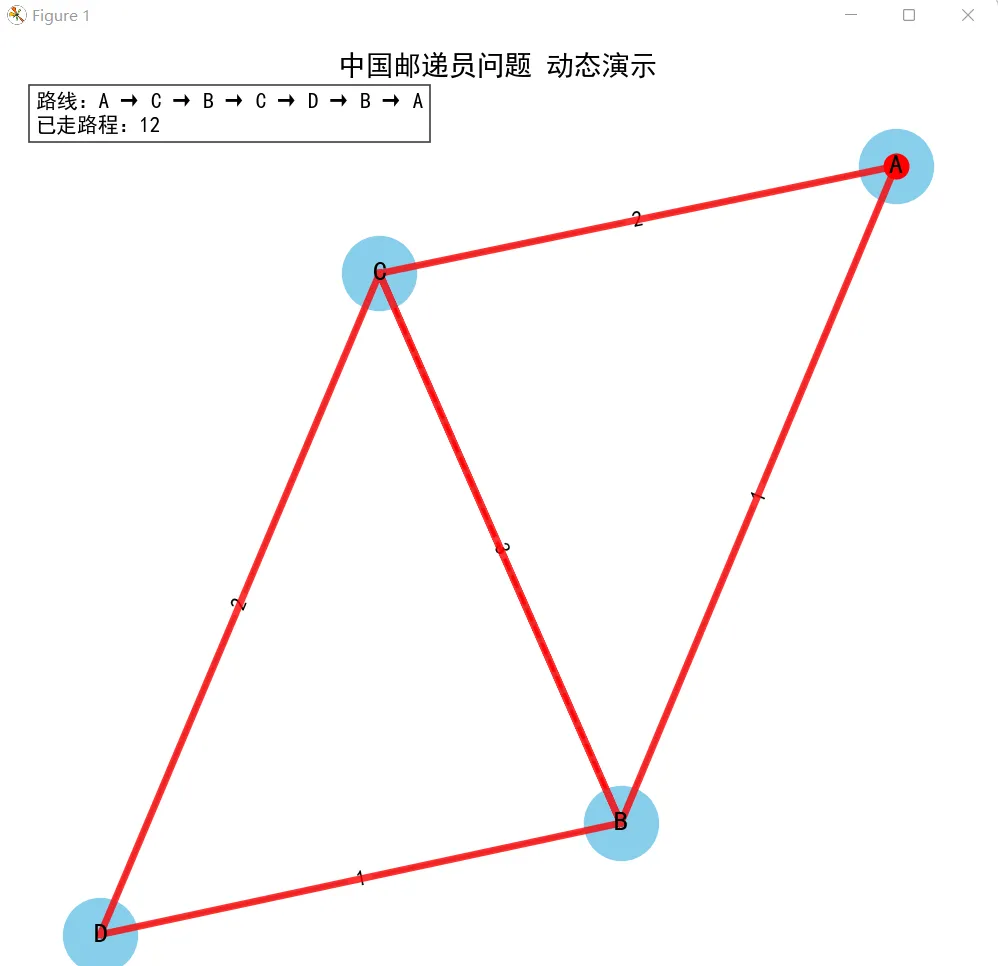
奇度顶点: ['B', 'D']最小权匹配路径:B → D最优路线: A → B → D → C → A → B → C → A最短总路程: 122. 可视化说明
蓝色节点:街道交叉口 / 邮局;
灰色实线:原始街道(边权为街道长度);
红色虚线:需要重复行走的最优路径;
红色实线 / 圆点:动态展示邮递员行走路线与当前位置;
左上角文字:实时路线 + 已走路程。
unsetunset五、代码使用说明unsetunset
手动定义地图:修改
CONFIG\[\&\#34;manual\_edges\&\#34;\],按\(起点, 终点, 长度\)格式添加街道;随机生成地图:将
mode改为random,设置节点数、边密度即可;调整动画速度:修改
speed参数,数值越大动画越慢。
unsetunset六、总结unsetunset
中国邮递员问题是图论落地到实际工程的经典案例,核心是通过奇偶点匹配将非欧拉图转化为欧拉图,最终得到最优遍历路线。
本文实现的代码:
严格遵循奇偶点图上作业法标准解法;
支持手动 / 随机两种地图模式;
包含动态可视化,直观展示求解过程;
可直接用于物流配送、环卫清扫、无人机巡检等路径规划场景。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Python 3.12.0 安装包下载+永久安装激活教程(附全部版本安装包)
- 少儿必学Python 原来不是为了当程序员!
- 【每天一个linux冷知识-5】你按下Ctrl+C之后发生了什么?——终端信号漫游记
- Linux给AI立规矩:代码可以写,锅必须你背
- 西安交大终于把Python做成了漫画电子书!
- Python for 循环:零基础也能看懂的超详细教程(附实战案例)
- kde plasma官方版(Linux桌面环境)
- Docker使用笔记:从构建python服务镜像到部署运行
- 用 Rust 实现 极简安全 Python 解释器:Monty 源码深度解析
- 数学建模:python环境配置指南
