步进电机应用场景极其丰富。下面就以入门级的技术水平把软硬件拼一拼,用Python语言控制步进电机转起来。所需的硬件很便宜,很便宜;所需的Python程序,可以让DeepSeek生成,再编辑一下。事情就这么简单。
Part 1 步进电机控制系统组成
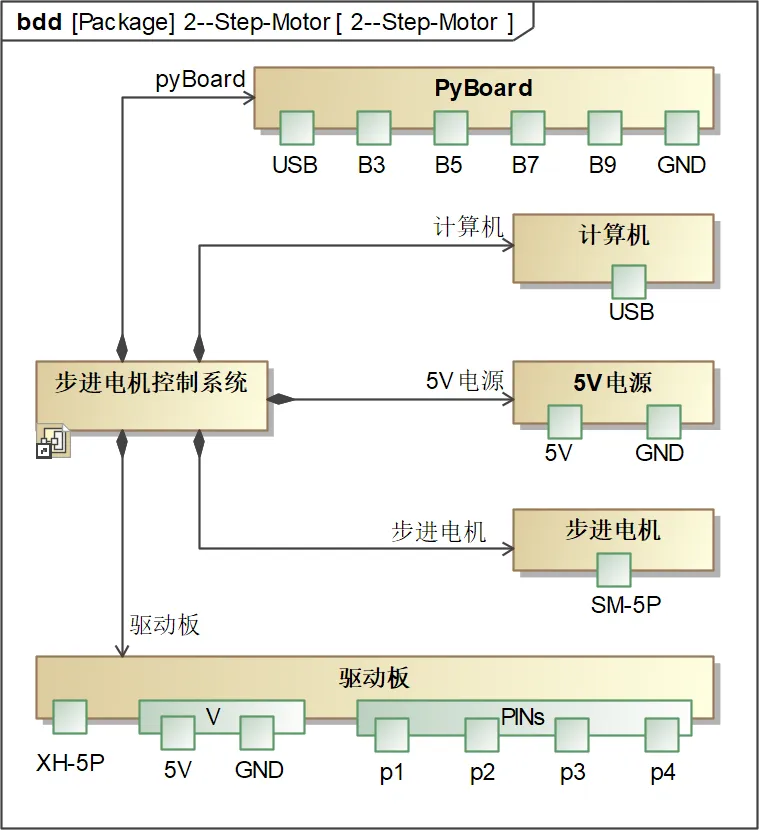
先上系统设计图纸,如下用SysML V1.6的画的bdd图,系统硬件组成包括:PyBoard、计算机、5V电源、步进电机、驱动板。每个硬件的接口、编号见图中端口名称。
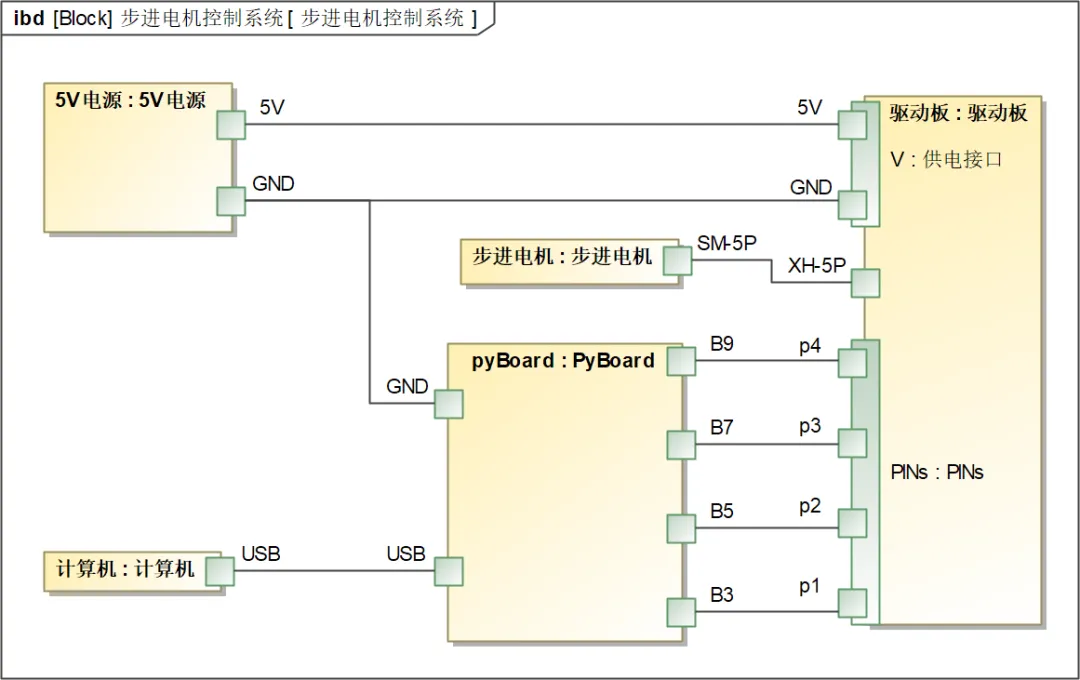
上图中各硬件端口间的连线如下ibd图所示。
Part-2 让PyBoard执行的Python程序
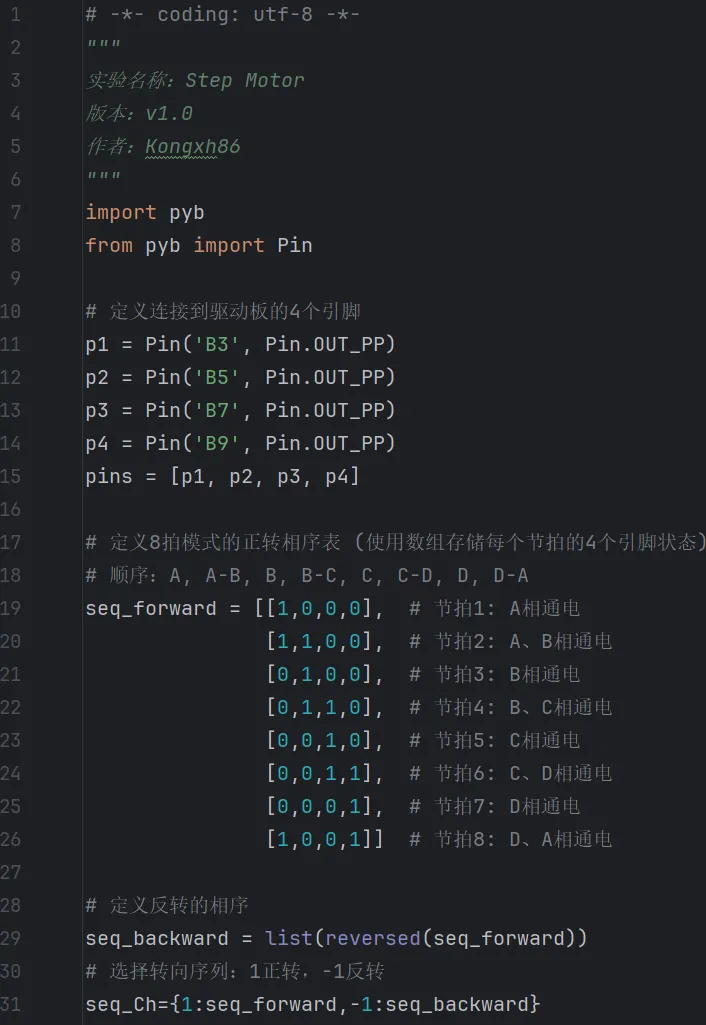
程序文件名为main.py,可以通过Thonny上传到PyBoard的Flash卡。main.py中的Python程序可以分为两部分。
第一部分,软硬定义。使用PyBoard上的B3、B5、B7、B9四个GPIO,为步进电机提供脉冲信号。使用8拍模式定义步进电机的正反转相序。
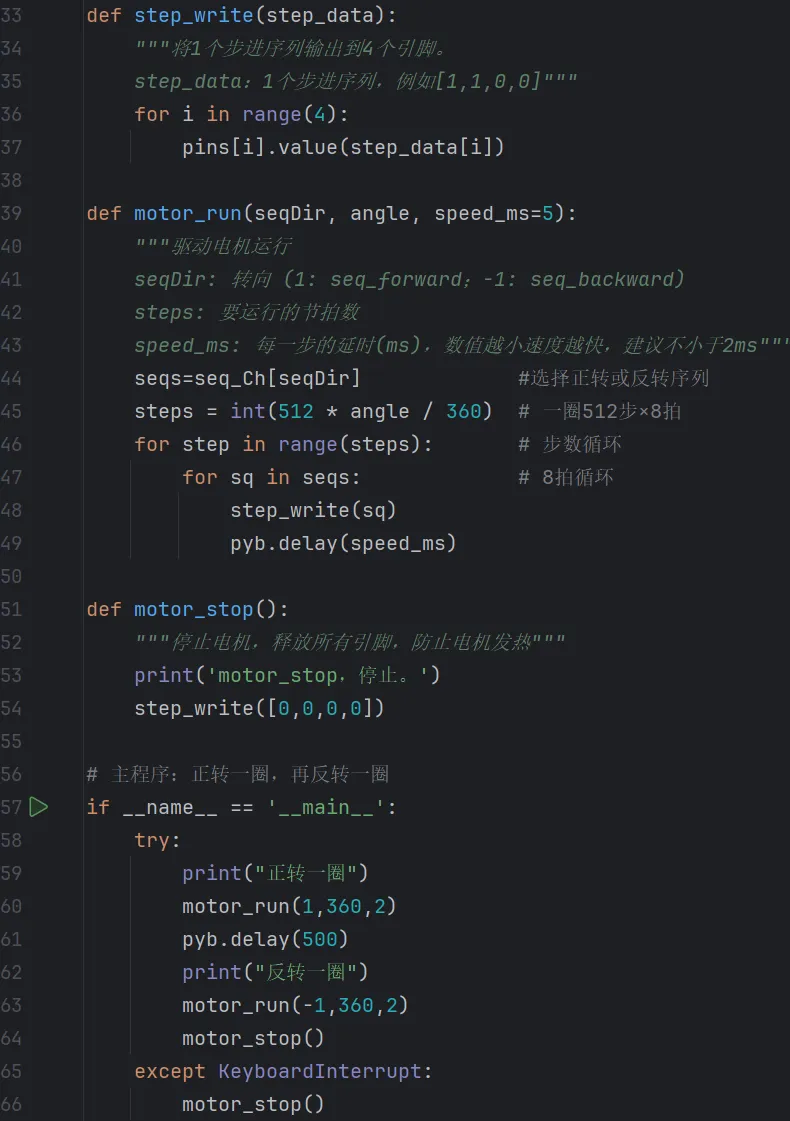
第二部分,控制算法。定义3个方法,控制电机的转、停。
Part-3 硬件连接
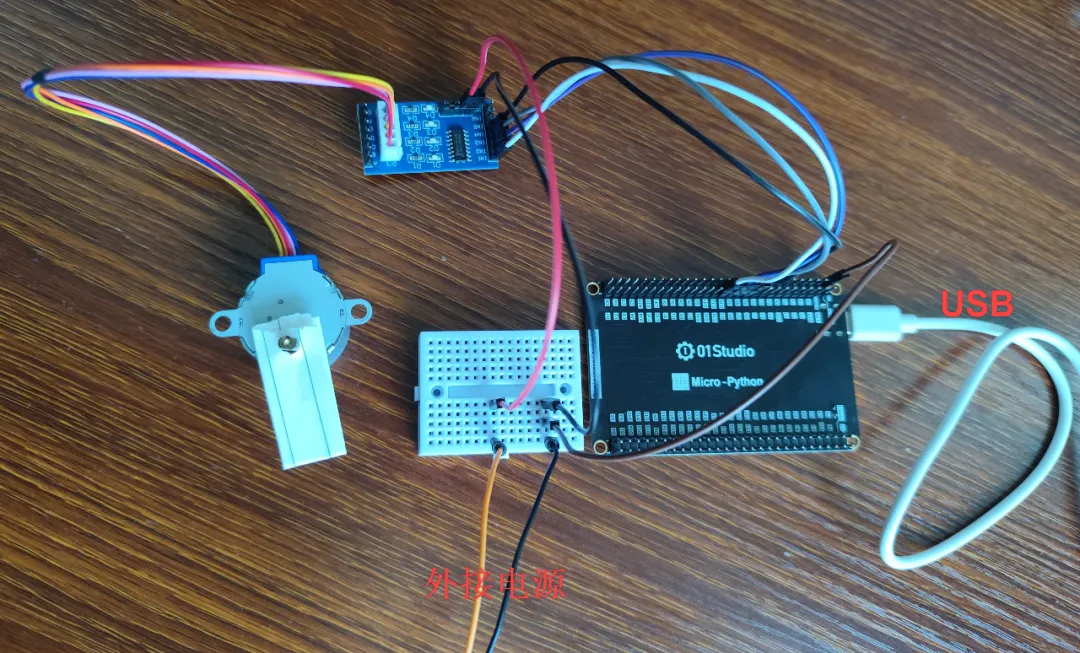
PyBoard(STM32F407)、步进电机(28BYJ-48 5V DC)、驱动板(ULN2003)如下图所示。5V电源为外接电源,可以采用USB充电器+USB电源线(红黑2根线)。硬件连线参考前文ibd图,连接如下。借助一个1.34元的面包板、7根几分钱的杜邦线,把步进电机、驱动板、PyBoard、外接电源连起来。PyBoard通过USB线连计算机。
Part-4 运行程序驱动电机转起来
PyBoard执行main.py,步进电机转起来。按键盘Ctrl+C,可终止。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
