PyBoard连接舵机,写好的Python脚本保存到PyBoard的flash,可以直接控制舵机转动。但是,让舵机执行在电脑端输入角度,就要稍微加点东西了。下面的例子使用PyCharm运行Python程序,与PyBoard中的Python程序对话,控制舵机转动。
Part-1 舵机控制系统组成
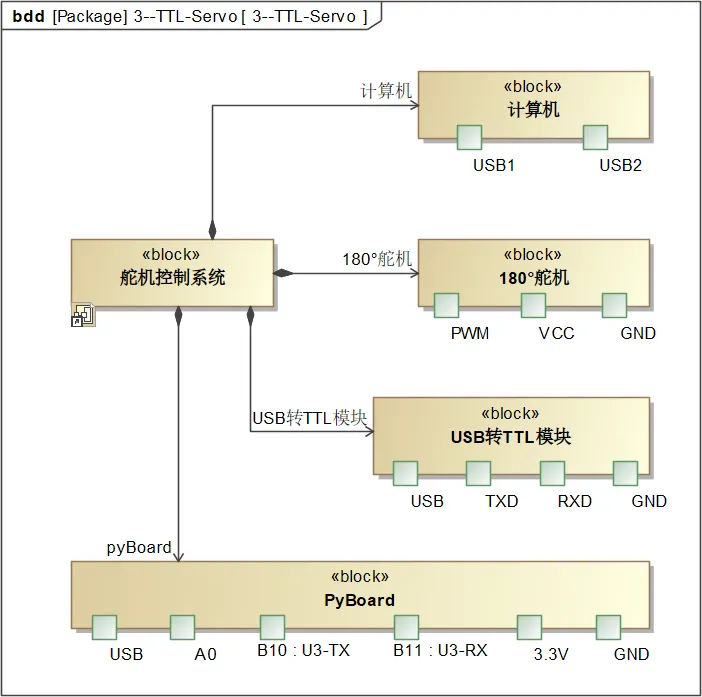
先上系统设计图纸,如下用SysML V1.6的画的bdd图,系统硬件组成包括:计算机、舵机(SG90,180°)、USB转TTL模块、PyBoard。每个硬件的接口、编号见图中端口名称。
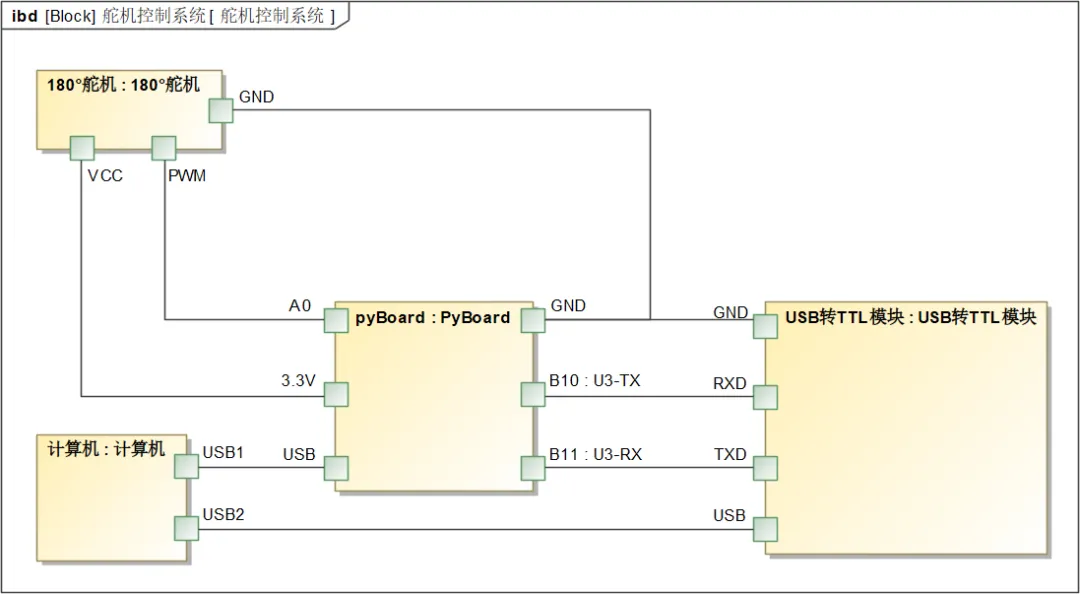
上图中各硬件端口间的连线如下ibd图所示。
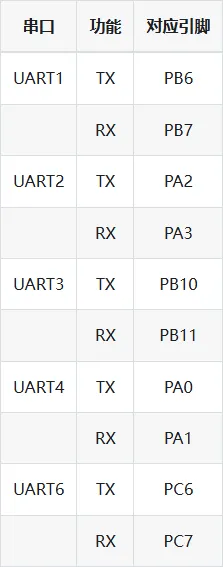
PyBoard的B10、B11针对应UART3的TX、RX,上图中B10:U3-TX与下图中UART3-TX-PB10对应。
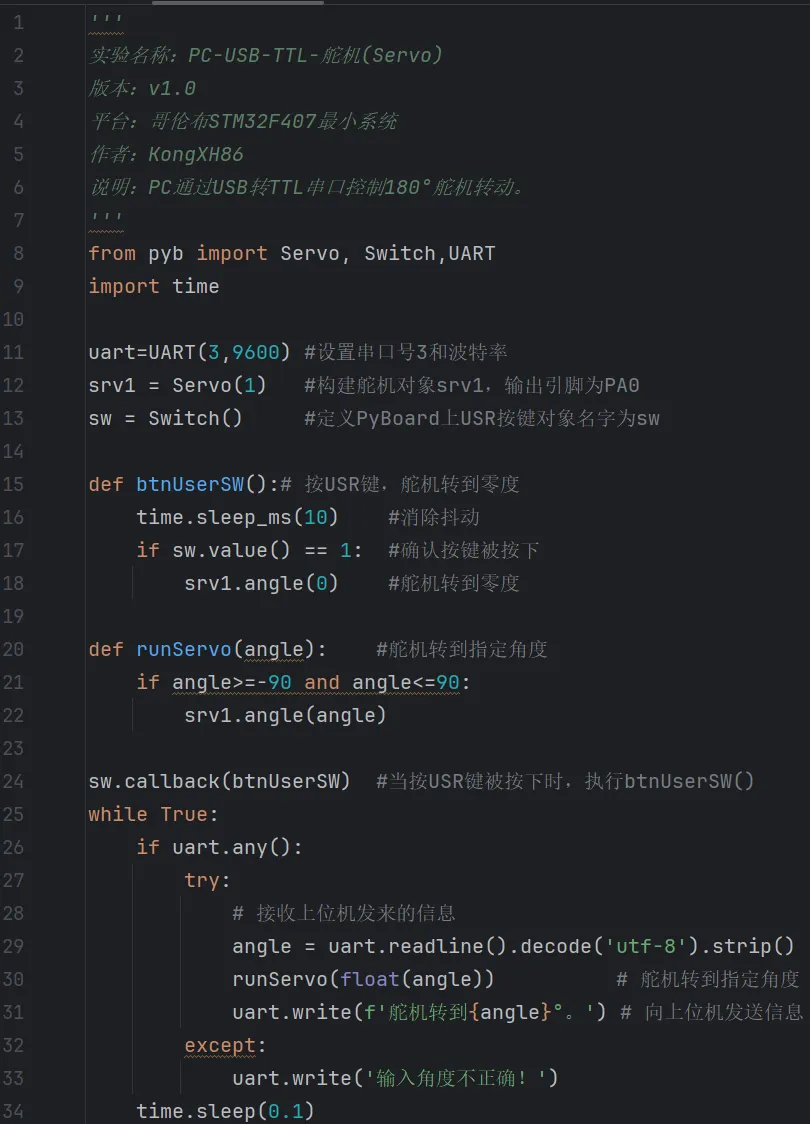
Part-2 让PyBoard执行的Python程序程序文件名为main.py,可以通过Thonny上传到PyBoard的Flash芯片。PyBoard的B10、B11针对应UART3,所以下图第11行,串口号为3。
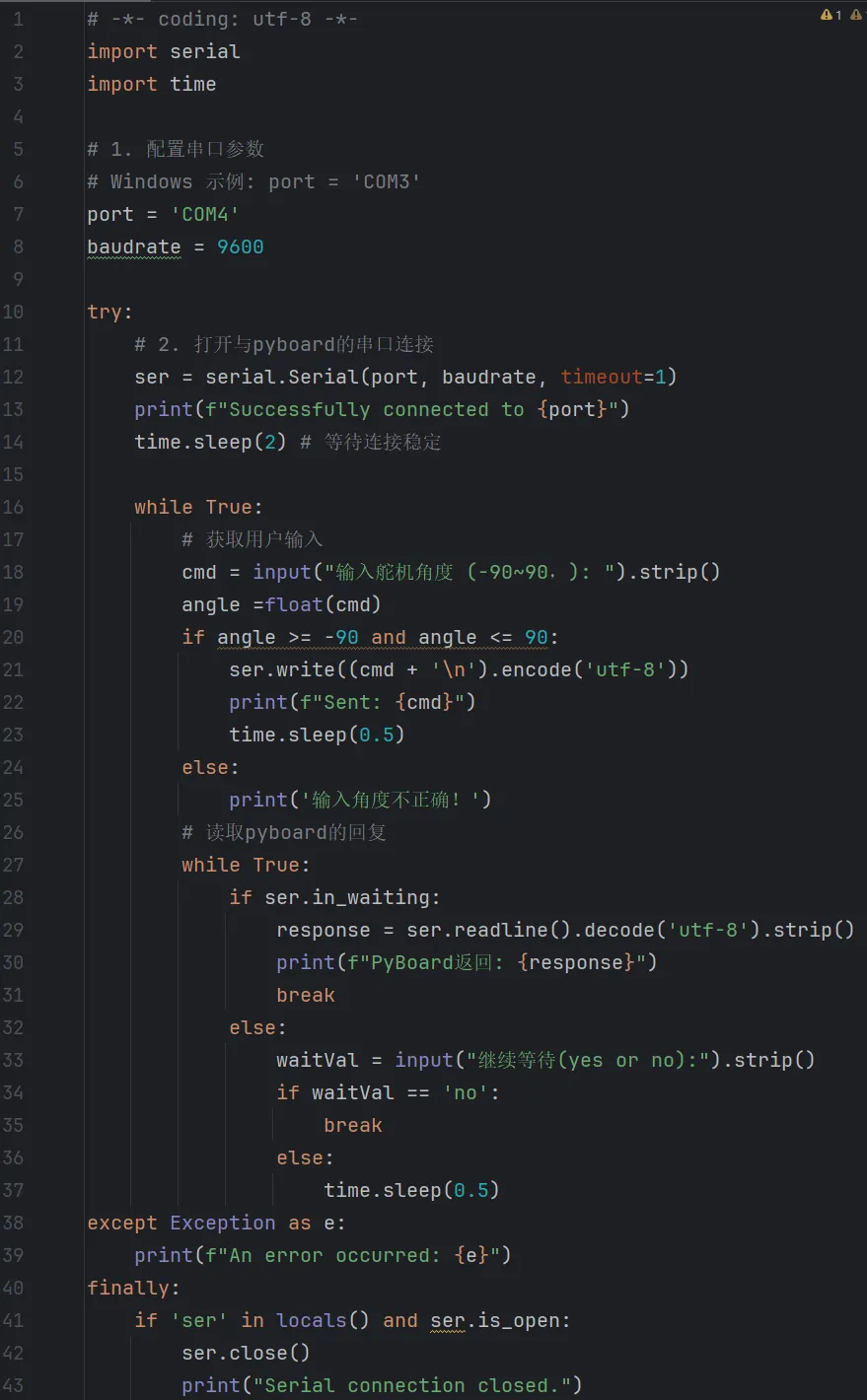
Part-3 电脑端运行的Python程序
电脑端运行的Python程序如下图所示,电脑的通过COM4与PyBoard的UART3通信。
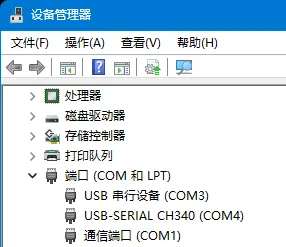
端口号通过查电脑的设备管理器获得,电脑端运行的程序用的端口指与USB转TTL模块的接口,即下图中的COM4。
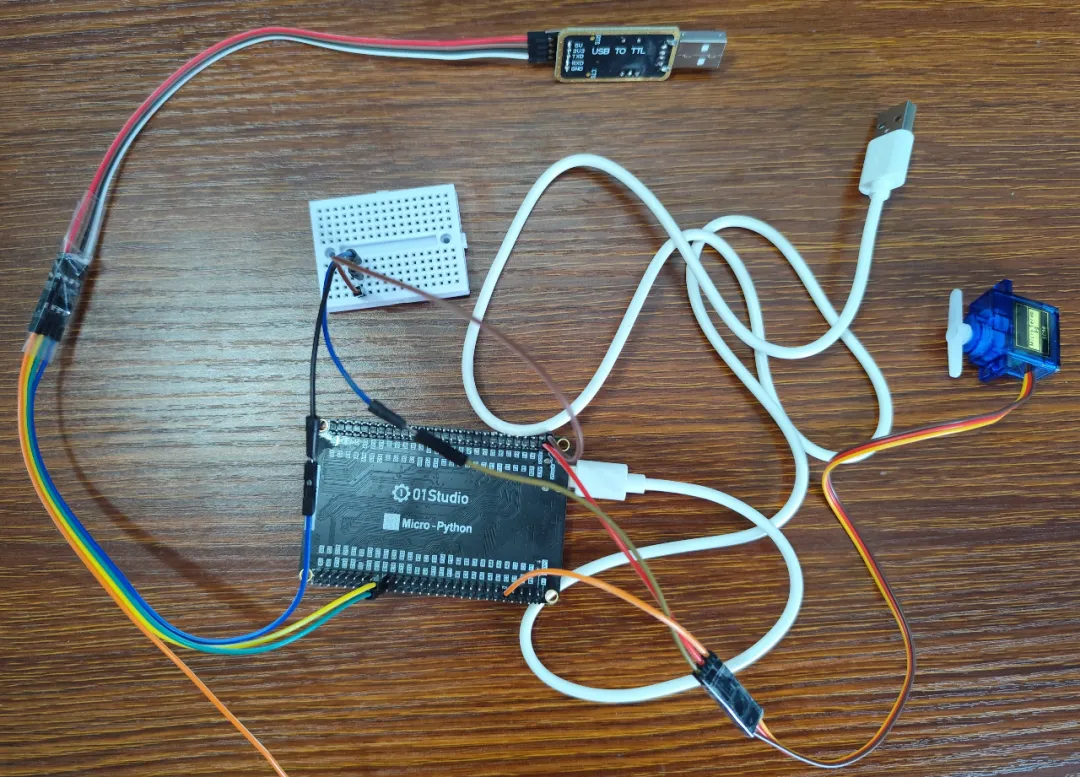
Part-4 硬件连接
PyBoard(STM32F407)、舵机(SG90)、USB转TTL模块连线参考前文ibd图,连接如下。借助一个小面包板,把舵机、USB转TTL模块、PyBoard的GND连起来。PyBoard、USB转TTL模块均通过USB连接计算机。
Part-5 运行程序让舵机转起来
在PyCharm中运行电脑端的Python程序,输入数字,Enter,则舵机转到输入角度值。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
