做机器视觉项目,图像去噪是必不可少的预处理步骤。
我们之前学的均值滤波、高斯滤波、中值滤波,都存在一个致命通病:去噪的同时模糊细节、边缘发虚、纹理丢失严重。
尤其是低光照拍摄、老旧摄像头、压缩后的图片,布满大量噪点,普通滤波要么去不干净噪,要么直接把图像“糊成一片”。
想要彻底去噪 + 完整保留边缘和纹理细节,传统滤波完全不够用。
今天给大家带来 OpenCV 高阶去噪神器:非局部均值去噪(Non-Local Means Denoising)。
它是传统滤波的全面升级版,也是工业级图像降噪的首选方案,实现真正意义上的:去噪不糊图、平滑保细节!
一、为什么需要非局部均值去噪?
先一句话总结传统滤波的短板:
均值/高斯滤波:只看局部邻近像素,平均加权,直接抹平纹理。
不管是边缘、纹理还是噪点,统统做平滑处理,最终结果就是:噪点少了,图也废了。
而非局部均值去噪,颠覆了传统思路:
不再只盯着当前像素的邻域小块,而是整图搜索相似纹理块,用全局相似区域加权平均修复噪点。
核心优势:纹理区域用纹理匹配,纯色区域做平滑降噪,自动区分噪点与细节!
二、非局部均值(NLMeans)原理通俗详解
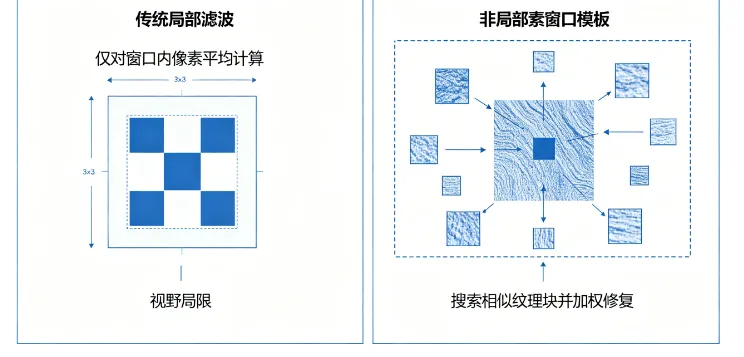
1、传统滤波(局部)
以目标像素为中心,取周围3×3、5×5小窗口,局部像素加权平均,视野极小、不分纹理。
2、非局部均值(全局)
整张图遍历搜索,找出和当前像素窗口高度相似的纹理块:
•相似块权重高,主导修复像素
•差异块权重极低,不参与计算
•噪点像素因为和周围纹理不匹配,会被自动平滑修正
最终实现:平坦区域强力降噪,边缘纹理完整保留。
三、OpenCV 四大去噪函数区分
NLMeans 区分灰度图、彩色图,OpenCV 提供四个专属接口,按需调用:
•cv2.fastNlMeansDenoising():灰度图去噪
•cv2.fastNlMeansDenoisingColored():彩色图去噪(最常用)
•cv2.fastNlMeansDenoisingMulti():灰度视频多帧去噪
•cv2.fastNlMeansDenoisingColoredMulti():彩色视频多帧去噪
四、核心参数详解(调参核心)
pythoncv2.fastNlMeansDenoisingColored(src, None, h, hColor, templateWindowSize, searchWindowSize) |
•h:亮度通道降噪强度,数值越大降噪越强,默认10
•hColor:色彩通道降噪强度,彩色图专属,默认10
•templateWindowSize:匹配窗口大小,推荐5/7(奇数)
•searchWindowSize:全局搜索窗口,越大效果越好、速度越慢,默认21
工程调参经验:轻微噪点h=6,中度噪点h=10,重度噪点h=15。
五、完整实战代码:彩色图非局部均值去噪
日常图片、监控画面、压缩图像通用降噪方案,去噪保细节效果碾压高斯滤波。
pythonimport cv2import numpy as np# 读取带噪图像img = cv2.imread("noise_img.jpg")# 非局部均值去噪(彩色图最优参数组合)denoised = cv2.fastNlMeansDenoisingColored(img,None,h=10, # 亮度降噪强度hColor=10, # 色彩降噪强度templateWindowSize=7,searchWindowSize=21)# 展示对比效果cv2.imshow("Original Noise Image", img)cv2.imshow("NLMeans Denoised", denoised)# 保存结果cv2.imwrite("denoised_result.jpg", denoised)cv2.waitKey(0)cv2.destroyAllWindows() |
六、灰度图去噪代码
针对灰度监控、红外图像、黑白文档图像降噪:
pythonimport cv2img = cv2.imread("gray_noise.jpg", 0)# 灰度图非局部去噪denoised = cv2.fastNlMeansDenoising(img,None,h=10,templateWindowSize=7,searchWindowSize=21)cv2.imshow("Gray Noise", img)cv2.imshow("Denoised", denoised)cv2.waitKey(0)cv2.destroyAllWindows() |
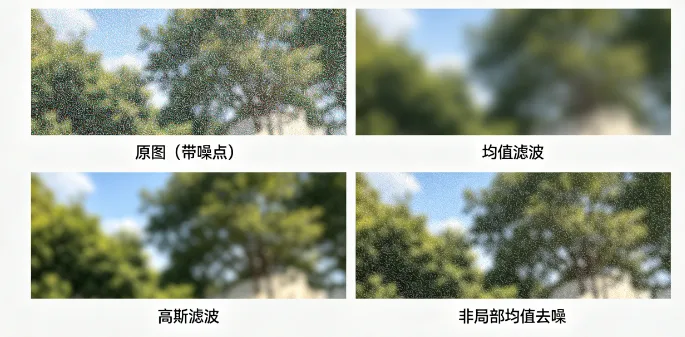
七、NLMeans vs 高斯/均值滤波 效果对比
•均值滤波:大面积模糊、细节完全丢失
•高斯滤波:轻微保边,但噪点残留多
•非局部均值:噪点干净彻底、边缘清晰、纹理保留完整
八、优缺点深度总结
✅ 核心优点
•全局相似块匹配,远超传统局部滤波
•超强保边、保纹理能力,去噪不糊图
•对高斯噪点、压缩噪点、轻微颗粒噪效果极佳
•参数稳定、调参简单、工业落地成熟
❌ 缺点局限
•算法计算量大,速度慢于高斯、均值滤波
•大面积椒盐噪点效果不如中值滤波
九、场景选型公式(直接抄作业)
•高速实时视频、简单降噪→ 高斯滤波
•黑白椒盐噪点、斑点噪点→ 中值滤波
•高精度图像、需要保留细节、画质优化→ 非局部均值去噪(首选)
十、新手避坑指南
•坑1:彩色图误用灰度去噪函数会出现色彩失真、色偏,彩色图必须用fastNlMeansDenoisingColored
•坑2:降噪强度h设置过大h>20会导致画面过度平滑,出现油画失真效果
•坑3:窗口参数设为偶数templateWindowSize 必须为奇数(5/7/9),偶数直接报错
•坑4:追求极致速度用NLMeans该算法偏慢速,实时流媒体优先高斯滤波
十一、全文总结
传统滤波负责“模糊降噪”,非局部均值负责“精细降噪”。
如果你的项目对图像细节、边缘精度、纹理完整性有要求,直接放弃高斯和均值滤波。
非局部均值去噪,是 OpenCV 传统视觉中画质最好、细节保留最强的降噪算法,也是图像预处理、画质修复、工业检测、OCR图像优化的终极降噪方案!
❤️ 点赞+在看,后台回复关键词【去噪】,领取多参数对比测试代码+视频实时降噪完整工程!
关注【AI与计算机视觉】,持续更新 OpenCV 图像预处理高阶实战干货!
评论区打卡:非局部去噪,吃透高精度图像降噪!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
