SSH连板卡调驱动、colcon编译ROS2节点、Docker隔离仿真环境、git管理代码——机器人开发从底层驱动到上层部署,每个环节都绕不开终端。本手册覆盖Linux基础、Git版本控制、Vim快速编辑、Docker容器化、ROS2全流程五大模块,附思维导图总览、场景速查表、开发工作流全景、Docker容器生命周期和故障排查决策树,从嵌入式调参到多机协作一册搞定
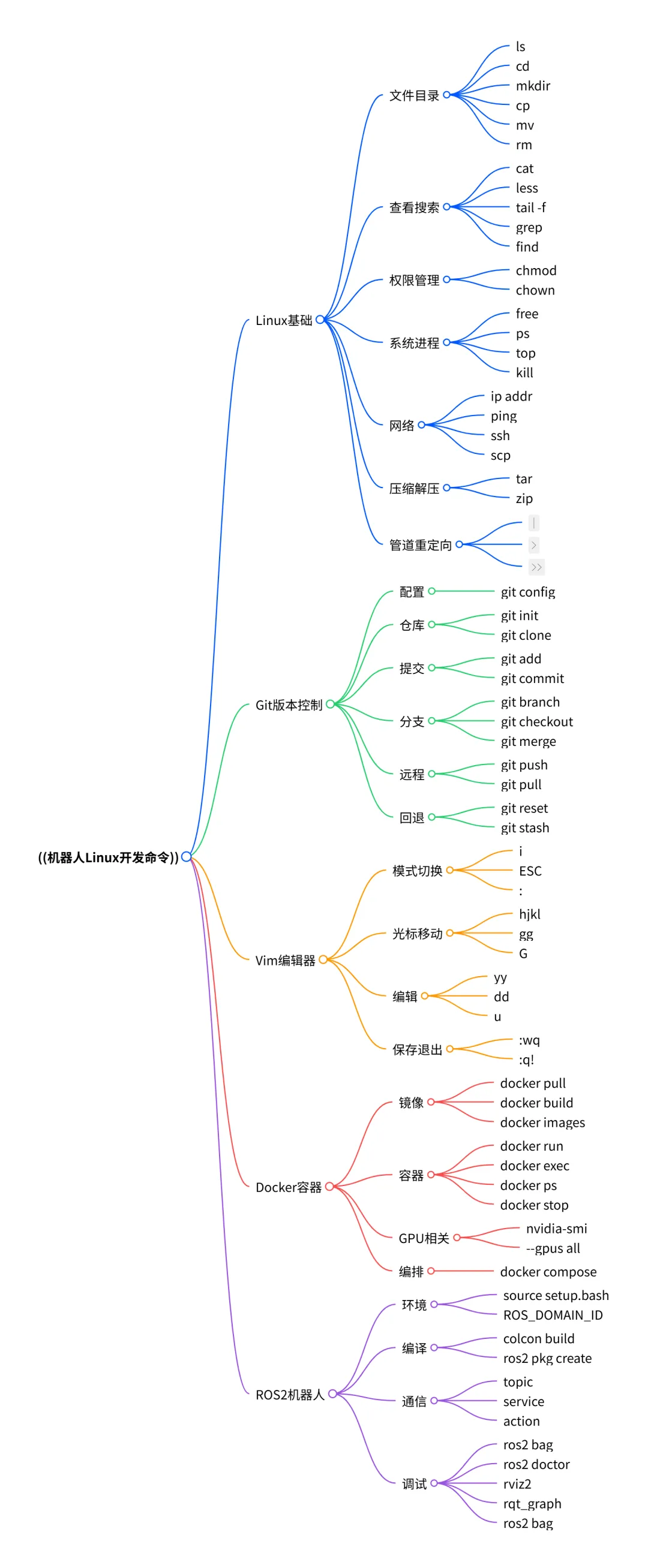
命令全景图
1. Linux 基础命令
1.1 文件目录
| | |
|---|
ls -la | | ls -la /dev/ttyUSB* |
pwd | | |
cd ~ && cd - | | |
mkdir -p | | mkdir -p src/robot/include |
touch | | touch main.cpp |
cp -r | | cp -r src/ backup/ |
mv | | mv old_name new_name |
rm -rf | | rm -rf build/ install/ log/ |
1.2 文件查看与搜索
| | |
|---|
cat | | cat /proc/cpuinfo |
less | | less /var/log/syslog |
tail -f | | tail -f /var/log/syslog |
head -n N | | head -n 20 build.log |
nl | | nl CMakeLists.txt |
grep -rn | | grep -rn "error" src/ |
grep -i | | grep -i "warning" build.log |
find | | find . -name "*.launch.py" |
which | | which ros2 && which colcon |
whereis | | whereis gcc |
1.3 权限管理
| | |
|---|
chmod +x | | chmod +x deploy.sh |
chmod 755 | | chmod 755 ~/ros2_ws/ |
chown | | sudo chown $USER:$USER /dev/ttyUSB0 |
嵌入式调试常用:串口设备默认属root/dialout组,把自己加入dialout组:sudo usermod -aG dialout $USER
1.4 系统与进程
| | |
|---|
free -h | | |
df -h | | df -h /home |
ps aux | grep | | ps aux | grep ros |
top | | |
kill -9 PID | | kill -9 12345 |
dmesg | tail | | dmesg | tail -20 |
uname -r | | |
lsb_release -a | | |
uptime | | |
1.5 网络
| | |
|---|
ip addr show | | |
ping | | ping 192.168.170.128 |
nmcli | | nmcli device wifi connect "SSID" password "pwd" |
curl -I | | curl -I http://localhost:11311 |
wget | | wget https://example.com/file.tar.gz |
ssh | | ssh hello@192.168.170.128 |
scp | | scp build/*.deb user@robot:/tmp/ |
1.6 压缩解压
| |
|---|
tar -zcvf archive.tar.gz dir/ | |
tar -zxvf archive.tar.gz -C /tmp/ | |
zip -r archive.zip dir/ | |
unzip archive.zip -d /tmp/ | |
1.7 管道与重定向
| | |
|---|
| | | ros2 topic list | grep scan |
> | | colcon build > build.log 2>&1 |
>> | | echo "export ROS_DOMAIN_ID=42" >> ~/.bashrc |
2>&1 | | colcon build 2>&1 | tee build.log |
tee | | ros2 launch pkg demo.launch.py 2>&1 | tee run.log |
2. Git 版本控制
2.1 基础配置与仓库
# 全局配置(仅首次)git config --global user.name "linuxros"git config --global user.email "dev@linuxros.com"git config --list # 查看当前配置# 仓库操作git init # 初始化本地仓库git clone git@github.com:user/repo.git # 克隆远程仓库
2.2 日常提交流程
git status # 随时查看状态(养成习惯)git add src/new_node.cpp # 添加指定文件(别用 git add .)git commit -m "feat: add lidar driver"# 提交到本地
2.3 分支管理
git branch # 查看本地分支git branch -a # 查看所有分支(含远程)git checkout -b feat/gazebo-sim # 创建并切换到新分支git switch feat/gazebo-sim # 切换分支(Git 2.23+)git merge feat/gazebo-sim # 合并到当前分支git branch -d feat/gazebo-sim # 删除已合并分支
2.4 远程同步
git remote add origin git@github.com:user/repo.gitgit push -u origin main # 首次推送并关联上游git pull --rebase origin main # 拉取更新(rebase保持历史线性)git fetch --all # 获取所有远程分支
2.5 版本回退与暂存
git log --oneline -10 # 看最近10条提交git log --graph --oneline --all # 图形化查看分支历史git diff HEAD~1 src/ # 查看本次改动git diff --staged # 查看已暂存的改动git reset --hard HEAD~1 # 回退到上一个版本(慎用!)git checkout -- src/broken.cpp # 撤销单个文件修改git stash # 暂存当前修改git stash pop # 恢复暂存的修改git stash list # 查看暂存列表
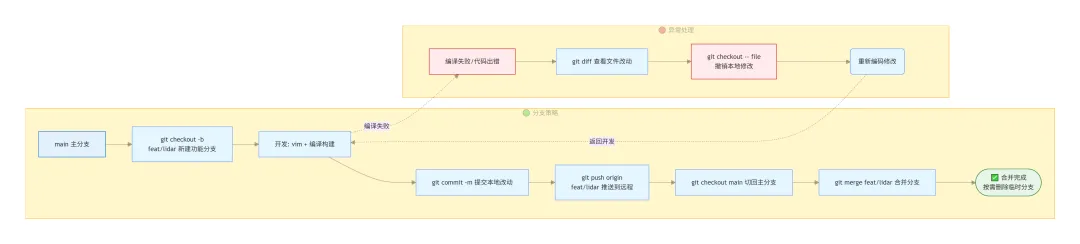
2.6 Git 分支工作流
3. Vim 编辑器速查
机器人开发中最常见场景:远程SSH改.bashrc、调launch参数、修CMakeLists.txt
3.1 模式切换
3.2 光标移动
3.3 编辑操作
3.4 搜索与保存
| |
|---|
/关键词 | |
:w | |
:q | |
:wq | |
:q! | |
:set nu | |
:set paste | |
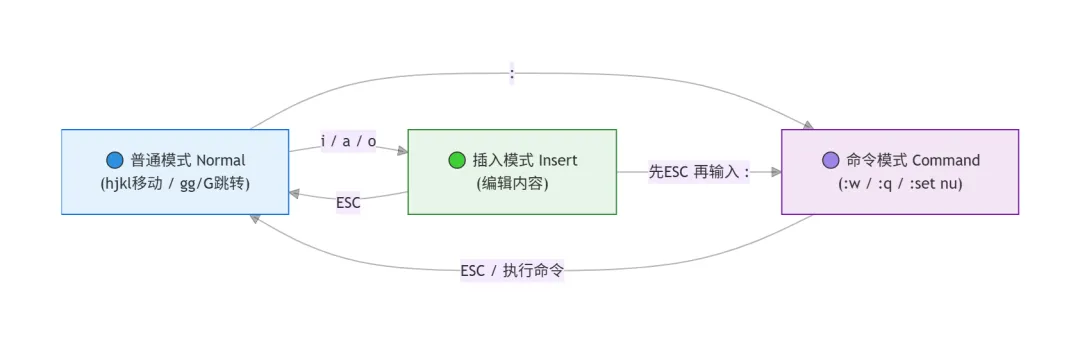
3.5 Vim 三种模式切换
4. Docker 容器
ROS2版本共存、Gazebo依赖冲突、环境隔离——Docker解决90%的"我这能跑你那不行"
4.1 服务与镜像
# 服务管理sudo systemctl start docker # 启动Docker服务sudo systemctl enable docker # 开机自启sudo systemctl status docker # 查看服务状态# 镜像操作docker pull osrf/ros:humble-desktop-full # ROS2 Humble官方镜像(完整版~2.5G)docker pull osrf/ros:jazzy-desktop # ROS2 Jazzy官方镜像docker images # 查看本地镜像列表docker rmi old_image:v1 # 删除镜像docker build -t my_robot:v1 . # 从Dockerfile构建自定义镜像
4.2 容器操作
# 创建并运行容器(开发模式)docker run -dit --name ros_dev \ --network host \ # 网络host模式(ROS2 DDS通信必需) -v /home/$USER/code:/workspace \ # 挂载代码目录 -v /tmp/.X11-unix:/tmp/.X11-unix \ # X11转发(GUI应用) -e DISPLAY=$DISPLAY \ osrf/ros:humble-desktop-full# 常用操作docker ps # 查看运行中容器docker ps -a # 查看所有容器(含已停止)docker start ros_dev # 启动已停止的容器docker exec -it ros_dev bash # 进入容器bashdocker logs -f ros_dev # 实时日志docker stop ros_dev && docker rm ros_dev # 停止并删除容器
4.3 GPU支持
# 安装nvidia-container-toolkit后docker run --gpus all ... # 容器内使用全部GPUdocker run --gpus '"device=0"' ... # 指定GPU设备# 验证:容器内执行 nvidia-smi
4.4 数据与编排
docker cp ros_dev:/workspace/log ./ # 容器→宿主机拷贝文件docker cp ./config.yaml ros_dev:/workspace/ # 宿主机→容器拷贝文件# Docker Composedocker compose up -d # 后台启动多容器docker compose down # 停止并清理docker compose ps # 查看compose容器状态docker compose logs -f # 查看compose日志
4.5 Dockerfile 最佳实践
# 多阶段构建:构建阶段 vs 运行阶段FROM osrf/ros:humble-desktop-full AS builderWORKDIR /wsCOPY src/ src/RUN . /opt/ros/humble/setup.sh && colcon buildFROM osrf/ros:humble-ros-coreCOPY --from=builder /ws/install /ws/install# 最终镜像不包含编译依赖,体积小得多
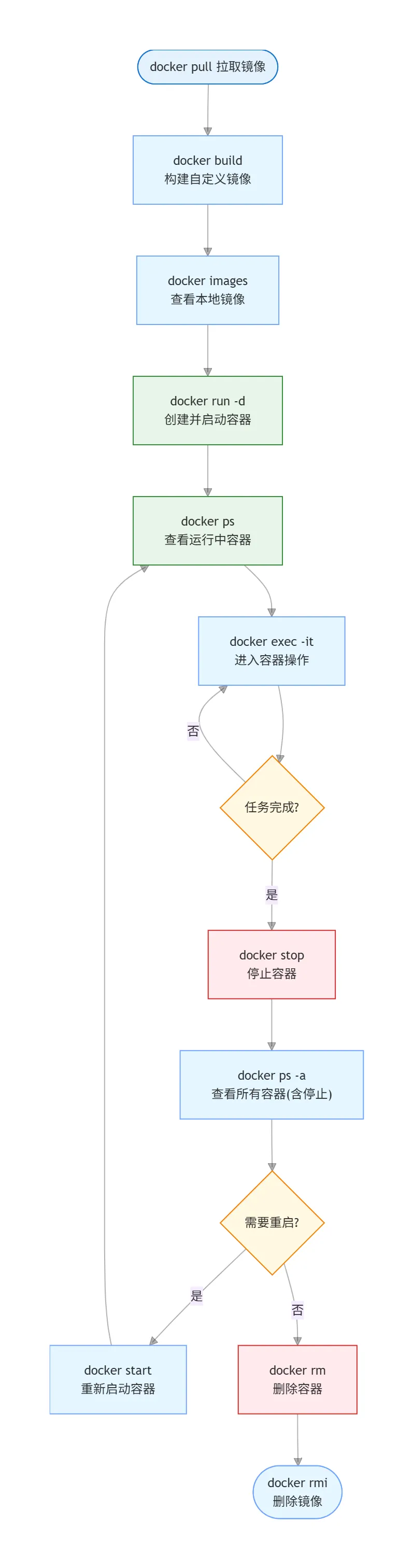
4.6 Docker 容器生命周期
5. ROS2 机器人命令
所有命令以 ros2 开头。查帮助:ros2 --help → ros2 <command> --help → ros2 <command> <verb> -h
5.1 环境加载
# 每个新终端都要source(建议写到 ~/.bashrc)source /opt/ros/humble/setup.bash # 或 /opt/ros/jazzy/setup.bashsource install/setup.bash # 加载工作空间# ROS_DOMAIN_ID:多组机器通信隔离(默认0,范围0-232)export ROS_DOMAIN_ID=42echo "export ROS_DOMAIN_ID=42" >> ~/.bashrc
5.2 编译与包管理
colcon build --symlink-install # 编译工作空间(Python改后自动生效)colcon build --packages-select my_pkg # 只编译指定包colcon build --packages-up-to my_pkg # 编译指定包及其依赖colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release # Release模式编译ros2 pkg create --build-type ament_cmake my_cpp_pkg # 创建C++包ros2 pkg create --build-type ament_python my_py_pkg # 创建Python包ros2 pkg list # 查看所有包ros2 pkg list | grep my_ # 过滤自己的包ros2 pkg executables my_pkg # 查看包的可执行文件ros2 pkg prefix my_pkg # 查看包安装路径
5.3 节点
ros2 run my_pkg my_node # 运行节点ros2 run my_pkg my_node --ros-args -r __node:=new_name # 重命名节点ros2 node list # 查看运行中节点ros2 node info /my_node # 查看节点拓扑(发布/订阅/服务)
5.4 话题 Topic
ros2 topic list # 查看所有话题ros2 topic list -t # 同时显示消息类型ros2 topic echo /scan # 实时打印话题数据ros2 topic echo /scan --no-arr # 不打印数组内容(精简输出)ros2 topic info /scan # 查看话题类型+发布者+订阅者ros2 topic info /scan -v # 详细模式ros2 topic hz /scan # 查看发布频率ros2 topic bw /scan # 查看带宽占用ros2 topic find geometry_msgs/msg/Twist # 按消息类型查找话题ros2 topic pub /cmd_vel geometry_msgs/msg/Twist \"{linear: {x: 0.5}, angular: {z: 0.1}}" -r 10 # 以10Hz发布速度指令
5.5 接口 Interface
ros2 interface list # 查看所有接口(msg/srv/action)ros2 interface list -m # 只看消息类型ros2 interface show std_msgs/msg/String # 查看消息结构定义ros2 interface show nav2_msgs/action/NavigateToPose # 查看动作定义ros2 interface proto geometry_msgs/msg/Twist # 查看消息模板(方便写pub命令)
5.6 服务 Service
ros2 service list # 查看所有服务ros2 service list -t # 同时显示服务类型ros2 service type /clear # 查看服务类型ros2 service call /reset std_srvs/srv/Empty "{}"# 调用无参数服务ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts \"{a: 3, b: 5}"# 调用带参数服务
5.7 动作 Action
ros2 action list # 查看所有动作ros2 action list -t # 同时显示动作类型ros2 action info /navigate_to_pose # 查看动作详情ros2 action send_goal /navigate_to_pose \ nav2_msgs/action/NavigateToPose "{pose: {...}}" --feedback # 发送目标+查看反馈
5.8 参数 Parameter
ros2 param list # 查看所有节点参数ros2 param list /my_node # 查看指定节点参数ros2 param get /my_node use_sim_time # 获取参数值ros2 param set /my_node linear_scale 1.5 # 动态修改参数(无需重编译)ros2 param dump /my_node # 导出参数为YAMLros2 param dump /my_node --output-dir ./ # 导出到文件ros2 param describe /my_node param_name # 查看参数描述(约束、范围等)
5.9 Launch 启动文件
ros2 launch my_pkg demo.launch.py # 启动launch文件ros2 launch my_pkg demo.launch.py use_sim:=true# 传参ros2 launch --debug my_pkg demo.launch.py # 调试模式(暂停等待调试器连接)
5.10 数据录制与回放 Bag
ros2 bag record -a # 录制所有话题ros2 bag record -o my_session /scan /tf # 录制指定话题,指定输出名ros2 bag info my_session/ # 查看bag信息ros2 bag play my_session/ # 回放数据ros2 bag play my_session/ --rate 0.5 # 半速回放ros2 bag play my_session/ -l # 循环回放
5.11 可视化与调试
rviz2 # 3D可视化(点云/轨迹/TF/模型)rqt_graph # 节点-话题关系图rqt_plot # 话题数据曲线图ros2 run tf2_ros tf2_echo map base_link # 查看两个坐标系间变换ros2 run tf2_tools view_frames # 生成TF树PDF
5.12 系统诊断与管理
ros2 doctor # 全面系统诊断(别名 ros2 wtf)ros2 doctor --report # 输出完整报告ros2 doctor --report-fail # 只看失败项ros2 daemon status # 守护进程状态ros2 daemon stop # 停止守护进程(网络切换后重置缓存)ros2 lifecycle list # 查看受控节点列表ros2 lifecycle set /node configure # 将节点状态设为configureros2 lifecycle set /node activate # 激活节点ros2 component types # 查看可用组件类型(高性能容器模式)
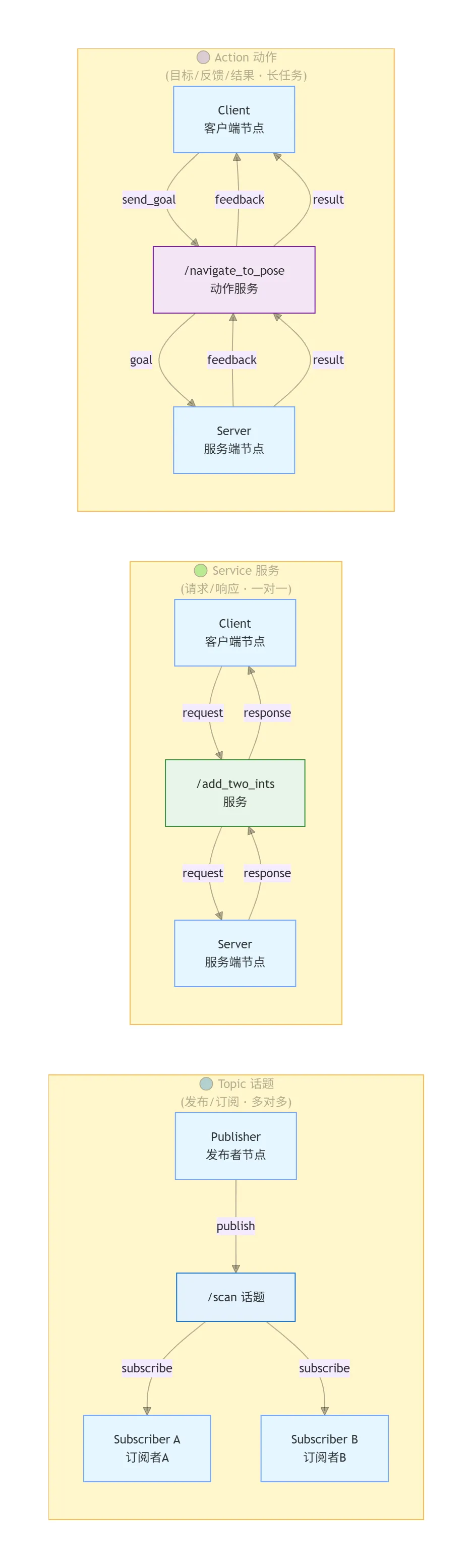
5.13 ROS2 三种通信机制对比
6. 场景速查表
每个典型场景对应一组命令,按执行顺序排列
| | |
|---|
| git clone → colcon build --symlink-install → source install/setup.bash → ros2 launch | |
| ssh user@ip → vim src/bug.cpp → colcon build --packages-select pkg → ros2 run pkg node | |
| ros2 topic list → ros2 topic info /topic -v → ros2 topic echo /topic | |
| ros2 bag record /sensor → ros2 bag info → ros2 bag play → rviz2 | |
| docker build -t img . → docker push → 同事 docker pull → docker run | |
| ps aux | grep ros → 记下PID → kill -9 PID → ros2 node list 确认 | |
| grep -rn "error" build.log → rosdep check --from-paths src → apt search ros-humble-xxx | |
| ros2 pkg create → vim src/node.cpp → colcon build --packages-select pkg → ros2 run pkg node → ros2 topic echo /out | |
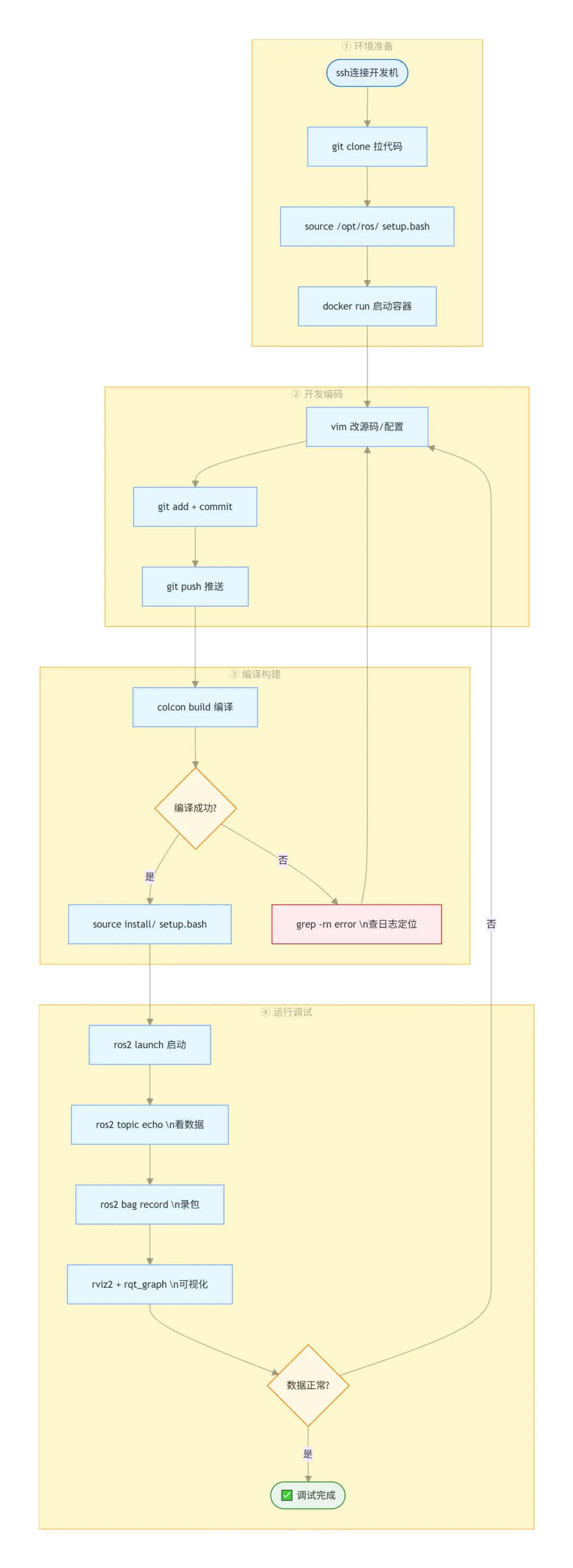
7. 开发工作流全景
8. 常见问题排查
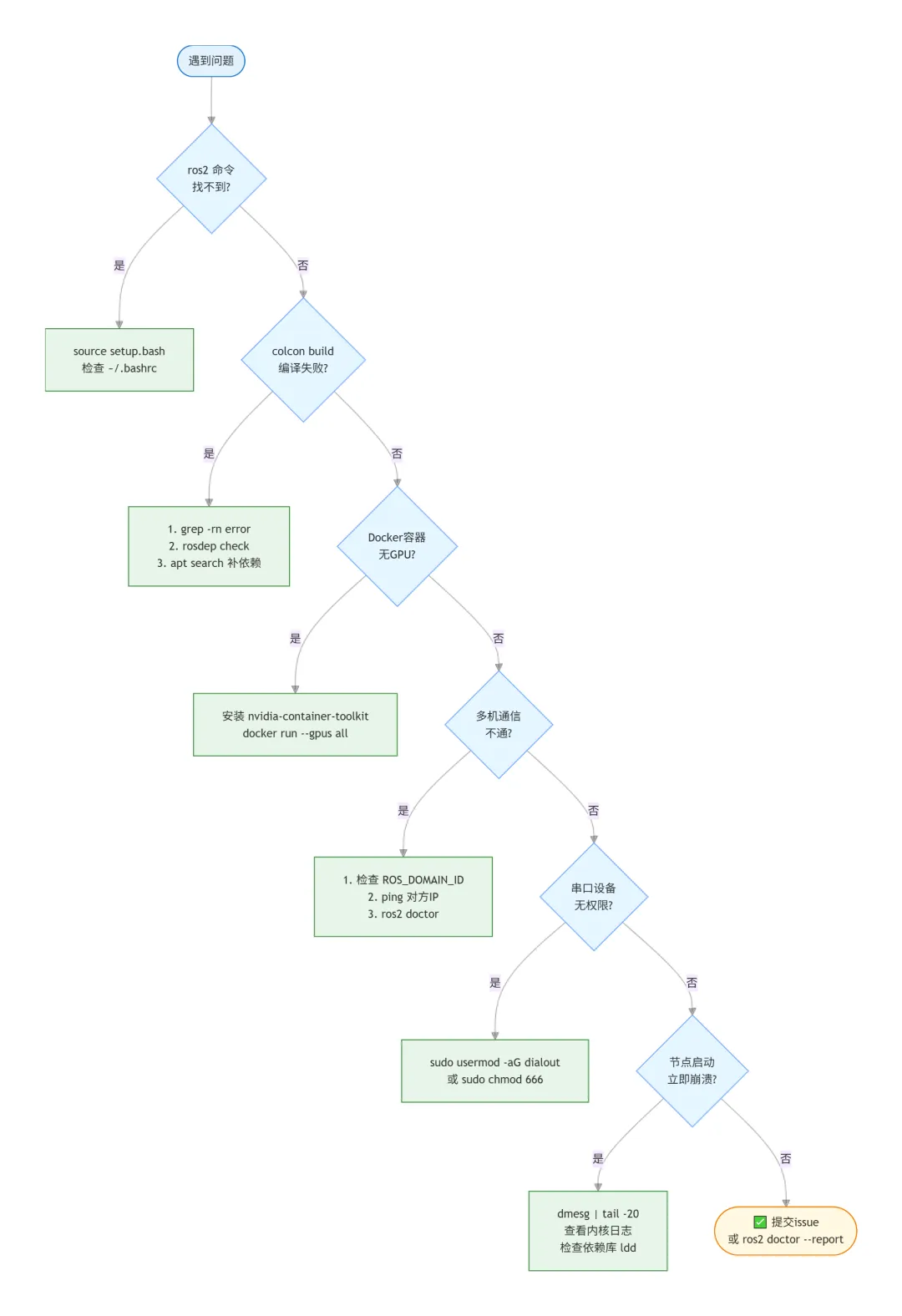
8.0 故障排查决策树
8.1 ros2: command not found
根源:没source环境。每个新终端都要:
source /opt/ros/humble/setup.bashsource install/setup.bash
一劳永逸:写到 ~/.bashrc:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrcecho "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
8.2 Docker容器内无GPU
前提:宿主机 nvidia-smi 能正常输出。
# 1. 安装nvidia-container-toolkitsudo apt install nvidia-container-toolkit# 2. 运行时加 --gpus 参数docker run --gpus all ...# 3. 容器内验证docker exec -it ros_dev nvidia-smi
8.3 colcon build 找不到依赖
# 1. 先检查缺失的依赖rosdep check --from-paths src --ignore-src# 2. rosdep自动安装rosdep install --from-paths src --ignore-src -r -y# 3. 如果rosdep也不知道,手动搜索apt search ros-humble- | grep xxx
确保 package.xml 和 CMakeLists.txt 中声明的依赖正确。首次用 sudo rosdep init && rosdep update 初始化rosdep。
8.4 ROS2多机通信不通
# 1. 确认两台机器 ROS_DOMAIN_ID 一致echo $ROS_DOMAIN_ID# 2. 确认能ping通ping <对方IP># 3. 诊断ros2 doctor --report# 4. 如果用了Docker,确保 network_mode: host
8.5 串口设备无权限
# 把自己加入dialout组(重启后生效)sudo usermod -aG dialout $USER# 临时方案:直接改权限sudo chmod 666 /dev/ttyUSB0# 验证ls -la /dev/ttyUSB*
9. 常用工具速记
| | |
|---|
| | rviz2 |
| | rqt_graph |
| | rqt_plot |
| | gazebo --verbose |
| | ros2 doctor --report |
| | htop |
| | ncdu ~/ |
| | tmux new -s ros |