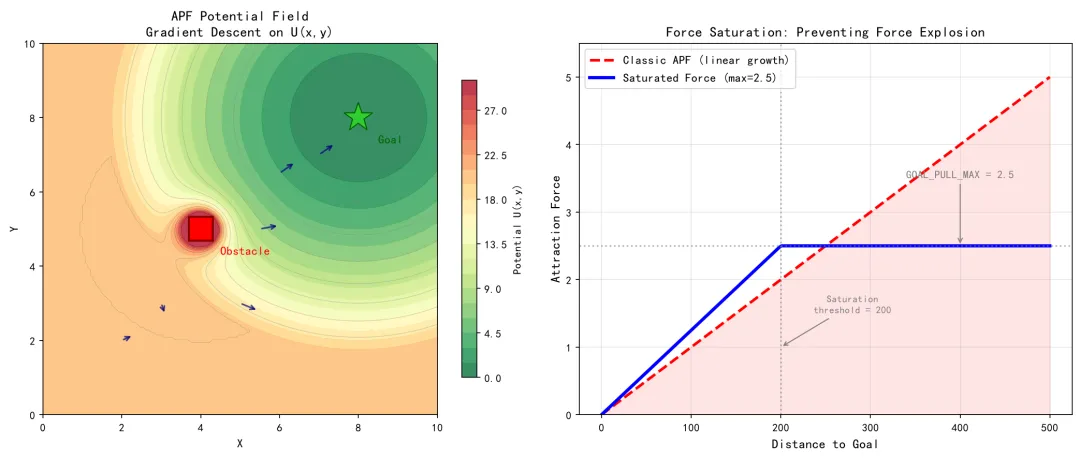
图:左——人工势场的势能面与梯度下降路径(绿色为目标吸引,红色为障碍物排斥);右——力饱和机制对比(蓝色为本项目的有界力函数,红色为经典 APF 的无限增长力)F_total = -∇U_attractive - ∇U_repulsive
其中 U_attractive 是关于目标距离的势函数(通常是二次或锥形),U_repulsive 是关于障碍物距离的势函数(通常是反比例或高斯型)。
def apf_accel(airspace, positions, velocities, formation_offsets, goal): # 1. 有界全局目标引力(质心级别的) goal_pull = _bounded_goal_pull(goal, centroid) # 2. 个体目标追踪力(距离自适应) attr = APF_ATTR_K * to_target / d_target * min(d_target, 150.0) / 150.0 # 3. 雷达避障力(预测式) obs_force = _radar_obstacle_avoidance(positions[i], velocities[i], obs_array) # 4. 避障优先级混合(动态权重) drone_goal_force = _blend_with_obstacle_priority(drone_goal_force, obs_force) # 5. 机间排斥力(硬约束) accels += _inter_drone_repulsion(positions, n)
力饱和(Force Saturation):APF 最重要的工程修正
经典 APF 最大的坑是力爆炸和局部极小值。
力爆炸问题:当目标很远时,引力与距离成正比(二次势场)或为常数(锥形势场)。如果用二次势场 U = ½k·d²,距离 500 单位时力就高达 k·500,这会把无人机加速到极高速度,直接冲入障碍物群。
本项目的解法是力饱和——当距离超过 200 单位时,引力不再增大,保持在 GOAL_PULL_MAX=2.5 的上限:
def _bounded_goal_pull(goal, centroid): goal_diff = goal - centroid gd = np.linalg.norm(goal_diff) if gd < 1e-3: return np.zeros(3) # 线性饱和函数:距离 200 以内线性增长,超过 200 恒定 strength = GOAL_PULL_MAX * min(1.0, gd / 200.0) return strength * goal_diff / gd
这相当于在控制理论中使用了一个饱和非线性环节(Saturation Nonlinearity)。从系统稳定性的角度看,有界力函数保证了系统能量的有界性——无论初始条件如何,加速度始终被限制在 [-MAX_ACC, MAX_ACC] 范围内,这为 Lyapunov 稳定性分析提供了基础。
避障优先级混合:动态权重调整
这是整个 APF 实现中最精妙的部分。传统 APF 的力叠加是简单的向量和 F = F_attr + F_rep,但当两种力量方向相反时(比如目标在障碍物后面),会出现"拉锯战"。
本项目用了一个动态权重混合:
def _blend_with_obstacle_priority(goal_force, obs_force): obs_mag = np.linalg.norm(obs_force) if obs_mag < 0.5: return goal_force # 压制因子:避障力越大,目标力被压制得越厉害 suppression = min(1.0, obs_mag / 4.0) return goal_force * (1.0 - suppression * 0.85)
当避障力增强时,目标方向的力被主动压制(最多压制 85%)。这实际上实现了一个优先级切换机制:
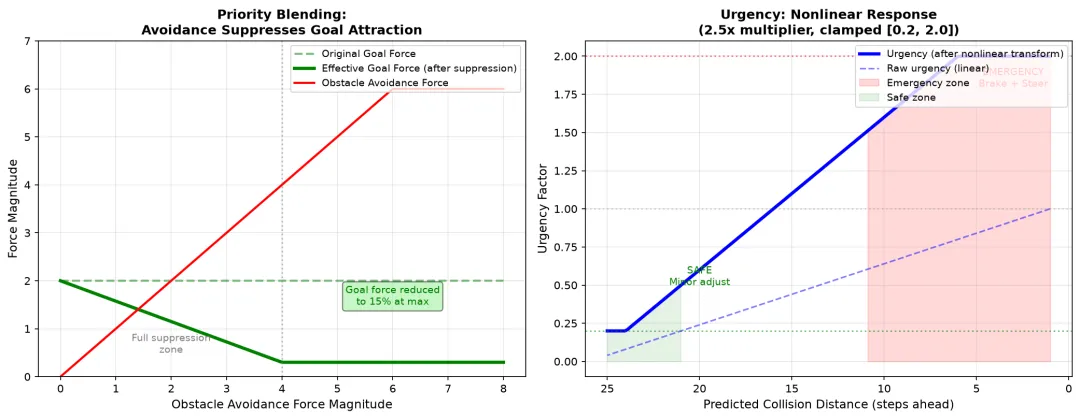
图:左——避障力对目标引力的压制效果(避障力越大,目标力被压制到越低);右——紧迫度非线性响应曲线(乘以 2.5 后截断到 [0.2, 2.0],确保"早做准备")- • 安全距离外:
suppression ≈ 0,目标力几乎不受影响 - • 中等距离:
suppression ∈ (0, 1),两个力共存但目标力减弱 - • 紧急距离:
suppression → 1,目标力被压制到 15%
这模拟了一个朴素的道理:遇到障碍物时,先保命,再赶路。 从优化理论的角度看,这是一个字典序优化(Lexicographic Optimization)——避障是第一优先级,目标趋近是第二优先级。
APF 的致命弱点:局部极小值
尽管做了力饱和和优先级混合,APF 仍有一个理论上的致命弱点——局部极小值(Local Minima)。
想象一个 U 形障碍物,目标在 U 的开口另一端。无人机进入 U 形内部后,斥力从三面把它推回来,引力又把它往里拉,最终它会停在 U 形内部某个力平衡点上,一动不动。
障碍物 障碍物 ╔══════╗ ╔══════╗ ║ ║ ║ ║ ║ ╚═══════╝ ║ ║ 无人机卡在这里 ║ ║ ↓ ║ ╚══════════════════════╝ ↑ 目标在对面
这是 APF 的拓扑缺陷,在数学上已被证明无法通过修改势函数来完全消除(Koditschek, 1987)。工程上的解决方案通常是:
- 2. 使用 Navigation Function(Rimon-Koditschek 导航函数)
本项目的"逃生方案"是雷达避障的切向绕行——当检测到即将碰撞时,施加一个切向力把无人机推向障碍物侧面,而不是简单地后退。这相当于在局部极小值附近注入了一个"逃逸方向"。
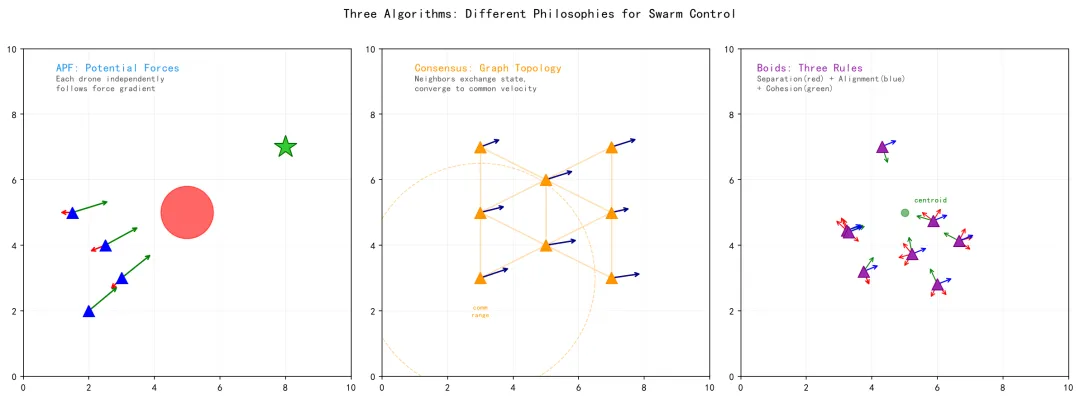
4.2 一致性编队控制:从图论和控制论的视角看集群
一致性(Consensus)协议是多智能体系统理论的基石,其数学根基在于代数图论(Algebraic Graph Theory)。
理论基础:Laplacian 矩阵与收敛性
在理想条件下(无障碍物),一致性协议的收敛性可以用图的 Laplacian 矩阵来分析。设 n 个智能体的通信拓扑用邻接矩阵 A 表示,Laplacian 矩阵 L = D - A(其中 D 是度矩阵),则一致性协议可以写为:
ẋ = -L·x
关键定理:如果通信图是连通的(即 L 的第二小特征值 λ₂ > 0),则所有智能体的状态渐近收敛到初始状态的加权平均。
本项目的"巧妙改造"实际上打破了这个理论框架——一致性力被限制为个体追踪力的 50%:
def consensus_accel(...): for j in range(n): if dist < CONS_COMM_RANGE: # 通信半径 250 desired_gap = offsets[j] - offsets[i] current_gap = positions[j] - positions[i] error = current_gap - desired_gap consensus_force += CONS_POS_K * (-error) * 0.005 consensus_force += CONS_VEL_K * (velocities[j] - velocities[i]) * 0.02 # 一致性力上限:不超过个体力的50% max_consensus = np.linalg.norm(individual_force) * 0.5 consensus_force = _cap_force(consensus_force, max(max_consensus, 0.5))
这意味着什么?从控制论的角度看,一致性协议不再是主导动力学,而是变成了个体动力学的"微扰项"。
增益调度的物理直觉
仔细看一致性协议的两个增益:
- •
CONS_POS_K * 0.005 = 3.0 * 0.005 = 0.015:位置修正增益 - •
CONS_VEL_K * 0.02 = 2.0 * 0.02 = 0.04:速度同步增益
速度同步增益是位置修正增益的约 2.7 倍。这符合控制论中的常识:阻尼(速度反馈)应该比刚度(位置反馈)更强,否则系统会振荡。
想象两个用弹簧连接的无人机:如果弹簧太硬(位置增益大)而阻尼太弱(速度增益小),它们会像弹簧上的小球一样来回振荡。增加速度同步增益相当于增加阻尼,让系统更快稳定。
50% 上限的工程智慧
"一致性力不超过个体力的 50%"——这是一个非常务实的工程妥协。
纯一致性协议在有障碍物时会出问题:为了保持队形,无人机可能硬穿障碍物。因为一致性协议只看"期望间距 vs 实际间距",不关心路径上有没有障碍物。
50% 上限确保了:"保命 > 保队形"。一致性只做轻量协调,不做强制约束。理论上不够"纯粹",但实际效果远优于教科书实现。
从更深层的角度看,这实际上是在实现一种优先级分层控制(Hierarchical Control):
- • 第一层:个体避障和目标追踪(高带宽,快速响应)
这种分层架构在工业控制系统中非常常见——底层控制器处理安全和实时性,上层控制器处理协调和优化。
通信拓扑的影响
代码中的 CONS_COMM_RANGE = 250 定义了通信半径。这意味着通信拓扑是一个距离相关的动态图——当两架无人机距离超过 250 时,它们之间的一致性力消失。
这在理论上可能带来问题:如果编队被障碍物"撕裂"成两部分,两部分之间的一致性约束消失,可能导致编队永久分裂。不过在本项目的空域尺寸(800×500)和 12 架无人机的密度下,这种情况极少发生。
4.3 Boids 集群算法:仿生学的胜利与涌现的数学
1986 年,Craig Reynolds 提出了 Boids 模型,用三条简单规则就能模拟鸟群的涌现行为:
- 1. 分离(Separation):离太近的邻居互相排斥
- 2. 对齐(Alignment):与邻居保持速度一致
def boids_accel(...): for j in range(n): if dist < BOIDS_VISION: # 视野半径 140 if dist < BOIDS_SEP_DIST: # 分离距离 45 sep += diff / (dist ** 2) # 反平方排斥 ali += velocities[j] # 速度对齐 coh += positions[j] # 位置聚合 boids_force = BOIDS_SEP_K * sep boids_force += BOIDS_ALI_K * (ali_avg - velocities[i]) boids_force += BOIDS_COH_K * (coh_center - positions[i])
为什么分离力用反平方而不是线性?
代码中 sep += diff / (dist ** 2) 使用的是反平方排斥力,这模拟了真实物理中的库仑力或万有引力。为什么不用更简单的线性力 F = k·(d₀ - d)?
这涉及到一个深刻的物理学原理:反平方力场具有"短程主导"特性——距离减半,力增大 4 倍。这意味着:
而线性力在远距离时仍然有显著的排斥效果,会导致编队"散开"。反平方力的这种非线性特性,使得 Boids 能够在聚合和分离之间找到自然的平衡点。
涌现(Emergence)的数学解释
Boids 最迷人的特性是涌现——没有全局指挥者,仅靠局部规则就能产生全局有序的编队行为。这在数学上如何解释?
从统计力学的角度看,Boids 的速度对齐规则实际上是一个Vicsek 模型(Vicsek et al., 1995)的变体。Vicsek 模型证明了:当粒子密度超过某个临界值时,系统会经历一个从无序到有序的相变(Phase Transition)。
有序参数 φ = |⟨v_i⟩| / ⟨|v_i|⟩
当 φ → 1 时,所有无人机速度一致(完全有序编队);当 φ → 0 时,速度随机(混乱)。
本项目的 BOIDS_VISION = 140 和 BOIDS_SEP_DIST = 45 实际上在控制这个"有效密度"——视野半径内的平均邻居数决定了系统处于有序相还是无序相。
Boids 的边界约束力
代码中有一段其他两种算法没有的逻辑——边界墙约束力:
wm = 50.0 # 边界影响范围accels[:, 0] += np.where(positions[:, 0] < wm, 2.0 / np.maximum(margin_x, 1), 0)accels[:, 0] -= np.where(W - positions[:, 0] < wm, 2.0 / np.maximum(margin_x, 1), 0)
这是因为 Boids 的聚合力天然有"向心"趋势,容易把整个编队推向空域边界。APF 和 Consensus 有明确的目标引力来对抗这种趋势,但 Boids 需要额外的边界反弹力来防止"集体撞墙"。
这暴露了 Boids 的一个本质弱点:它缺乏全局方向感。没有目标引力,Boids 就是一个自组织的"鱼群",而不是有目的的"编队"。
五、雷达主动避障:最硬核的子系统
三种算法共享同一套避障引擎——雷达主动避障系统。这是整个项目技术含量最高的部分,也是教科书和论文中很少详细讨论的。
5.1 核心思路:预测式避障 vs 反应式避障
这是两种根本不同的避障哲学:
反应式避障(Reactive):
if 距离 < 阈值: 施加排斥力
优点:简单快速。缺点:当速度很快时,检测到危险已经来不及了——就像开车时只看车头前方 1 米。
预测式避障(Predictive):
沿当前速度方向预测未来 N 步轨迹if 未来轨迹穿过障碍物: 提前转向
优点:提前预判,从容应对。缺点:计算量更大。
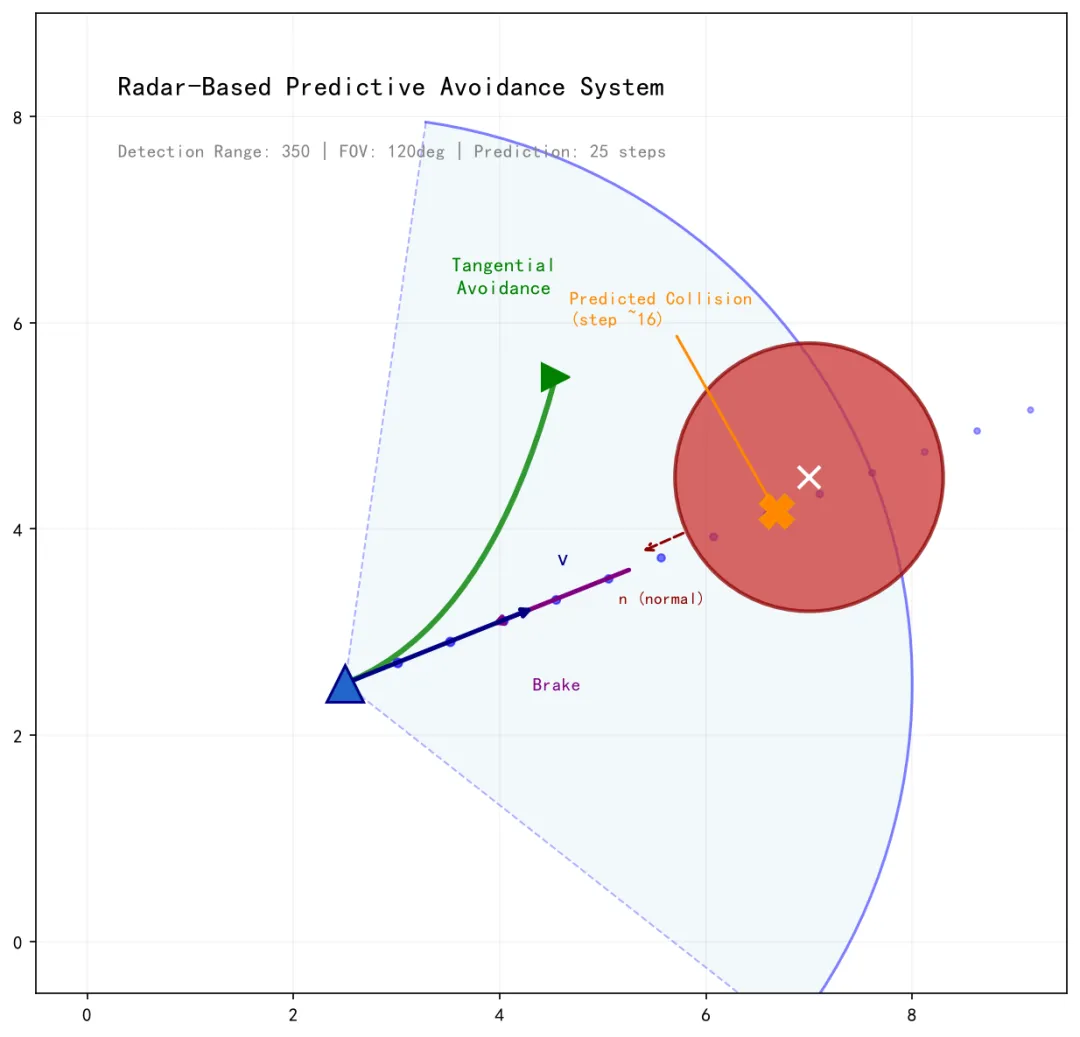
本项目的雷达系统预测 25 步未来轨迹:
RADAR_RANGE = 350.0 # 雷达探测距离RADAR_ANGLE_HALF = np.pi / 3 # 雷达半角 60度(总视场 120度)RADAR_PREDICT_STEPS = 25 # 预测 25 步def _radar_obstacle_avoidance(pos, vel, obs_array): # 1. 沿当前速度方向预测未来轨迹 for step in range(1, RADAR_PREDICT_STEPS + 1): fut_pos = pos + vel * t fut_margin = np.linalg.norm(fut_to_obs) - or_ if fut_margin < DRONE_RADIUS + 15: # 预测到碰撞! det_dist = step # 记录碰撞将在多少步后发生 break # 2. 计算切向绕行方向 tangential = np.array([-vel_dir_2d[1], vel_dir_2d[0]]) # 3. 根据紧迫度施加转向力 + 制动力 urgency = 1.0 - (det_dist - 1) / RADAR_PREDICT_STEPS force += RADAR_STEER_K * urgency * steer_3d # 转向 force += -RADAR_BRAKE_K * urgency * v_radial # 制动
这就像自动驾驶中的"预碰撞系统":不是等到快撞了才刹车,而是提前 25 步就开始规划绕行路线。
与模型预测控制(MPC)的关系
如果你熟悉最优控制理论,会发现这个雷达系统实际上是模型预测控制(Model Predictive Control, MPC)的极简版本:
标准 MPC 需要求解一个在线优化问题,计算量巨大。本项目用了一个聪明的简化:不做优化,只做碰撞检测 + 启发式转向。这在实时性要求高的场景下非常实用。
图:雷达避障工作流程——沿速度方向预测 25 步轨迹(蓝色点),检测到与障碍物的预测碰撞后,施加切向转向力(绿色路径)和制动力(紫色)5.2 切向选择:左绕还是右绕?——一个计算几何问题
当预测到碰撞时,系统需要决定向左还是向右绕。这看似简单,实际上是一个经典的计算几何问题。
tangential = np.array([-vel_dir_2d[1], vel_dir_2d[0]]) # 速度方向的左切向dot1 = np.dot(det_normal, tangential)dot2 = np.dot(det_normal, -tangential)if dot2 > dot1: tangential = -tangential # 选择离障碍物法线更远的方向
算法的核心思想:选择与障碍物法向量夹角更大的切向。
为什么要这样做?设障碍物法向量 n 指向无人机(即从障碍物中心指向无人机),两个切向分别是 t_left 和 t_right。算法选择与 n 点积更小的那个方向——即更"背离"障碍物中心的方向。
t_left ← 点积大 → 不选 ↗ 障碍物 → n → 无人机 ↘ t_right ← 点积小 → 选择
这确保了无人机总是朝着远离障碍物中心的方向转弯,而不是贴边飞。这个设计避免了"擦边球"式的危险飞行。
5.3 紧迫度函数:非线性的直觉
urgency = 1.0 - (det_dist - 1) / RADAR_PREDICT_STEPSurgency = max(0.2, min(2.0, urgency * 2.5))
第一行计算的是线性紧迫度:碰撞越近(det_dist 越小),urgency 越大。第二行做了一个非线性变换:乘以 2.5 并截断到 [0.2, 2.0]。
这意味着:
- • 碰撞在 25 步后:
urgency = 0.2(轻微调整) - • 碰撞在 13 步后:
urgency ≈ 1.25(中等待命) - • 碰撞在 1 步后:
urgency = 2.0(紧急规避!)
2.5 的乘数确保了紧迫度在预测范围的前半段就已经超过 1.0——系统倾向于"早做准备"而不是"临阵磨枪"。
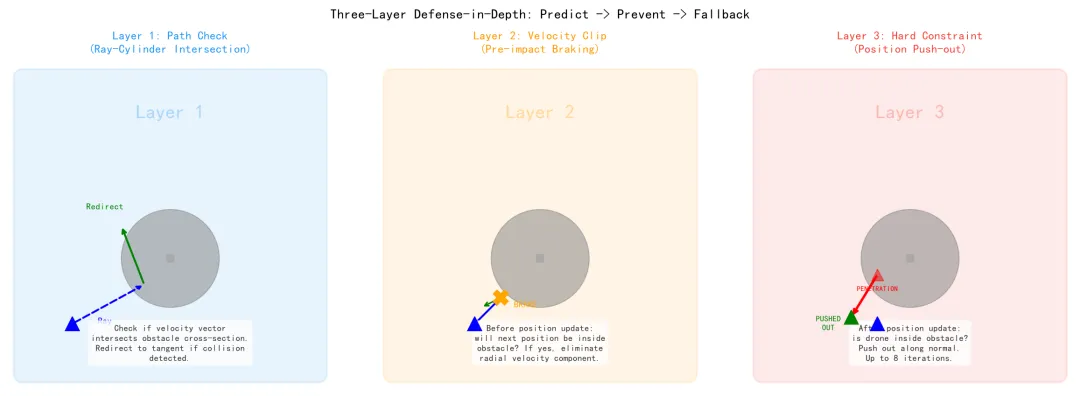
5.4 三层防护网:纵深防御
即使雷达避障已经很强,项目还加了两道"保险",形成了完整的**纵深防御(Defense in Depth)**体系:
第一层:射线-圆柱相交检测(路径级)
在速度应用之前,用射线与圆柱体的解析相交测试来预判:
def _ray_cylinder_intersect(pos_2d, dir_2d, obs_center_2d, obs_r, max_dist): oc = pos_2d - obs_center_2d a = np.dot(dir_2d, dir_2d) b = 2.0 * np.dot(oc, dir_2d) c = np.dot(oc, oc) - obs_r * obs_r discriminant = b * b - 4 * a * c if discriminant < 0: return False, 0.0 t1 = (-b - sqrt_d) / (2 * a) return True, t1 # 返回碰撞距离
这是一个经典的**光线追踪(Ray Tracing)**算法——解一元二次方程判断射线是否穿过圆柱的横截面。如果检测到碰撞,就把速度方向偏转到切向。
第二层:速度裁剪(速度级)
在速度更新后、位置更新前,检查当前速度是否会导致下一帧进入障碍物:
next_x = positions[i, 0] + velocities[i, 0] * dtnext_z = positions[i, 2] + velocities[i, 2] * dtnext_margin = sqrt((next_x-ox)² + (next_z-oz)²) - or_if next_margin < safe_margin: # 消除径向速度分量(刹车) velocities[i] -= 1.5 * v_radial * normal
如果预测到下一帧会进入危险区域,直接消除朝向障碍物的速度分量。
第三层:硬约束推离(位置级)
最后的位置级硬约束——如果无人机已经"穿进"了障碍物,直接把它推到安全距离之外。最多迭代 8 次来确保收敛:
for _ in range(8): # 最多 8 次迭代 for i in range(n): for ob in obs_array: if margin < hard_margin: push = or_ + hard_margin - h_dist positions[i] += normal * push # 同时消除法向速度 velocities[i] -= 1.8 * v_radial * normal
为什么需要迭代 8 次?因为推出一个障碍物后,可能又"撞入"了另一个。8 次迭代确保了在多障碍物紧邻的情况下也能收敛到安全位置。
图:三层纵深防御——第一层射线检测预判路径碰撞并转向,第二层速度裁剪消除径向分量紧急制动,第三层硬约束将穿透的无人机推出障碍物这三层构成了 "预测 -> 预防 -> 兜底"的完整安全链:
六、物理引擎:子步积分与数值稳定性
6.1 六子步积分:解决"隧道效应"
每帧的时间步长 DT=0.35,但物理更新被拆成了 6 个子步:
n_substeps = 6sub_dt = DT / n_substeps # = 0.0583for _ in range(n_substeps): _path_obstacle_check(...) enforce_obstacle_velocity_clip(...) positions += velocities * sub_dt enforce_obstacle_constraints(...)
为什么这么做?这是数值积分中经典的**隧道效应(Tunneling Effect)**问题。
假设 MAX_SPEED = 4.5,DT = 0.35,则每帧最大位移 = 4.5 × 0.35 = 1.575 单位。而最小障碍物半径是 22,看起来没问题。但如果考虑多步累积,高速无人机可能在两帧之间"穿过"一个薄障碍物。
拆成 6 子步后,每子步最大位移 = 4.5 × 0.0583 = 0.262 单位,远小于任何障碍物的最小尺寸。这就确保了碰撞检测不会漏检。
从数值分析的角度看,这是一种显式欧拉方法(Explicit Euler)的改进版。标准的显式欧拉 x(t+Δt) = x(t) + v·Δt 是一阶精度,误差为 O(Δt²)。拆成子步后,虽然仍然是欧拉方法,但每步的 Δt 更小,累积误差也更小。
计算代价的权衡
6 子步意味着碰撞检测的工作量乘以 6。但考虑到 Python/NumPy 的向量化计算能力,以及只有 12 架无人机和 12 个障碍物,这个代价完全可接受。
理论上,子步数应该根据最大速度和最小障碍物尺寸来动态计算:
n_substeps = ceil(MAX_SPEED * DT / (MIN_OBSTACLE_SIZE / 2))
本项目选择固定 6 子步是一个工程简化,在参数范围内足够安全。
6.2 近障自动减速:自适应速度控制
near_obs_factor = min(1.0, (距离 - 半径) / 80.0)max_spd = MAX_SPEED * (0.3 + 0.7 * near_obs_factor)
这是一个精妙的自适应速度控制:
- • 距离障碍物 > 80 单位:
near_obs_factor = 1.0,max_spd = MAX_SPEED(全速) - • 距离障碍物 40 单位:
near_obs_factor = 0.5,max_spd = 0.65 × MAX_SPEED(减速) - • 距离障碍物 0 单位(贴着):
near_obs_factor = 0.0,max_spd = 0.3 × MAX_SPEED(最慢)
最慢降到正常速度的 30%——不是 0%,因为完全停止会导致无人机"卡住"。30% 的速度让无人机在穿越狭窄通道时"小心翼翼"但仍能移动。
这个设计与自动驾驶中的安全距离模型异曲同工:速度应该与可用制动距离成正比。距离障碍物越近,留给避障系统的反应时间越少,速度就应该越低。
6.3 加速度饱和与起飞升力
acc_mag = np.linalg.norm(accels, axis=1, keepdims=True)safe_a = np.where(acc_mag > MAX_ACC, accels / np.maximum(acc_mag, 1e-9) * MAX_ACC, accels)if step < 20: lift = 1.5 * (1 - step / 20) safe_a[:, 1] += lift
加速度被限制在 MAX_ACC = 5.0,这模拟了无人机的推力上限——真实无人机的电机输出是有限的。
起飞阶段额外施加递减的升力 lift = 1.5 * (1 - step/20),从 1.5 线性递减到 0。这模拟了真实无人机的起飞过程——初始需要克服重力加速爬升,到达巡航高度后升力需求减小。
七、编队到达与队形收敛:最后 100 米的精细操作
当无人机到达目标区域后,进入专门的队形收敛阶段。这是整个系统中最容易被忽视、但工程上最微妙的部分。
7.1 两阶段到达判定
# 阶段1:进入到达半径if dist_to_target < ARRIVAL_RADIUS: # 80 单位 arrived[i] = True# 阶段2:队形位置收敛(在 _settle_at_goal 中)if dist < 0.5: positions[idx] = target_pos.copy() # 精确到位 velocities[idx] = 0
为什么不直接要求 dist < 0.5 才算到达?因为如果要求太高,无人机可能在目标附近"绕圈"永远到不了精确位置(特别是 APF 的局部极小值问题)。
两阶段设计:先用宽松的阈值"捕获"无人机,再用专门的收敛算法精确定位。
7.2 渐进式收敛:先快后慢
for settle_step in range(300): progress_ratio = settle_step / 300 fraction = 0.95 - progress_ratio * 0.3 # 从 0.95 递减到 0.65 _settle_at_goal(positions, velocities, ..., fraction)
这个 fraction 参数控制了每步向目标移动的比例。0.95 意味着每步移动剩余距离的 95%——几乎一步到位。0.65 则更温和。
为什么递减?
- • 初期(fraction=0.95):无人机刚进入到达区域,位置偏差大,需要快速拉到目标附近
- • 后期(fraction=0.65):位置已经接近目标,需要避免过冲和振荡
这在控制理论中叫做变增益控制(Variable Gain Control)或增益调度(Gain Scheduling)。本质上是用高增益快速消除大误差,用低增益精细处理小误差。
7.3 软碰撞检测:为队形让步
def _enforce_inter_drone_collision_soft(positions, velocities, margin, arrived_mask=None): for i in range(n): for j in range(i + 1, n): dist = np.linalg.norm(diff) if arrived_mask[i] and arrived_mask[j]: effective_margin = DRONE_RADIUS * 2 # 12*2=24,只防物理重叠 else: effective_margin = margin # 30,正常间距
正常飞行时,机间安全距离是 INTER_DRONE_MARGIN = 30。但编队间距(GAP = 45)减去安全余量后,无人机之间的距离可能只有 20~25。如果用 30 的碰撞阈值,碰撞检测会不断推开精心定位的编队成员,导致队形永远无法收敛。
软碰撞检测的解法:对已到达的无人机,只检查物理重叠(24),不检查间距冲突(30)。
这体现了一个深层的工程原则:在不同阶段,约束的严格程度应该不同。飞行时要保守,到位后要精确。
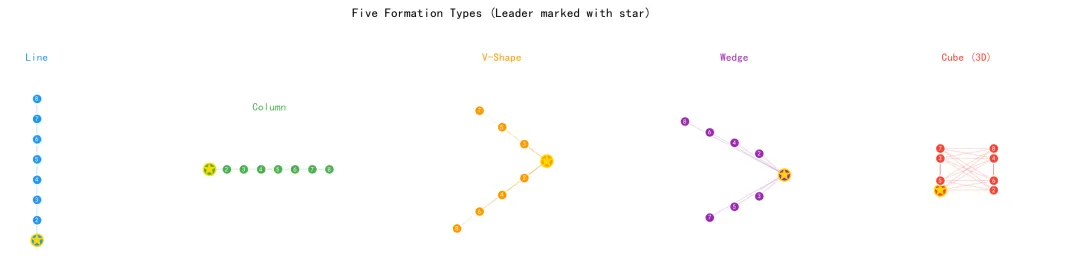
八、五种编队队形:几何设计与拓扑分析
系统支持五种经典编队:
图:五种经典编队队形(星号为领队)——横队、纵队、V 字、楔形和立方体,各有不同的拓扑特性和适用场景从图论的拓扑连通性角度看,不同编队的抗毁性差异巨大:
- • 链式拓扑(横队/纵队):任何一个中间节点失效,编队就断裂
- • 树形拓扑(V 字/楔形):只有领头节点失效才会导致分裂
- • 网格拓扑(立方体):需要多个节点同时失效才会断裂
队形自适应缩放
编队偏移量会根据目标位置自动缩放,确保编队不会超出空域边界:
for lo, hi, avail_neg, avail_pos in [ (min_off[0], max_off[0], avail_x_neg, avail_x_pos), (min_off[1], max_off[1], avail_y_neg, avail_y_pos), (min_off[2], max_off[2], avail_z_neg, avail_z_pos),]: if hi > avail_pos: scale = min(scale, avail_pos / hi) if lo < -avail_neg: scale = min(scale, avail_neg / (-lo))offsets *= scale
这是一个约束满足问题的简化求解:在所有三个维度上同时满足边界约束,取最小缩放比。
同时,无人机数量也会影响间距:
gap = GAP * min(1.0, 12.0 / max(n, 1)) ** 0.3
当无人机数量超过 12 时,间距按 n^(-0.3) 缩放。指数 0.3 是一个经验值——比线性缩放(指数 1.0)更温和,避免了大量无人机时间距过小导致碰撞检测过度干扰。
九、计算复杂度分析:三种算法的效率对比
在实际部署中,计算效率往往是决定性因素。让我们从理论复杂度来分析:
设 n = 无人机数量,m = 障碍物数量,P = 预测步数(25),S = 子步数(6)。
当 n 较小时(<50),三种算法的差异不大。但当 n 增长到数百或数千时,O(n²) 的邻居搜索会成为瓶颈。
**空间哈希(Spatial Hashing)**是标准的优化手段:将空间划分为网格,每架无人机只搜索相邻网格中的邻居。这可以把 Boids 的复杂度从 O(n²) 降到接近 O(n)。
不过对于本项目的 12 架无人机规模,O(n²) 完全不是问题——12² = 144 次比较,微秒级完成。
雷达避障的优化空间
雷达避障系统当前对每架无人机检查所有障碍物,复杂度 O(n·m·P)。一个优化方向是空间分区:预先计算每个位置附近的障碍物列表,避免全局遍历。另一个方向是距离预筛选:先检查无人机到障碍物中心的距离,如果大于 RADAR_RANGE + 障碍物半径 就跳过。
代码中已经有这个预筛选:
if margin >= RADAR_RANGE: continueif angle > RADAR_ANGLE_HALF and margin > 40: continue
这两个条件大幅减少了实际需要预测的障碍物数量。
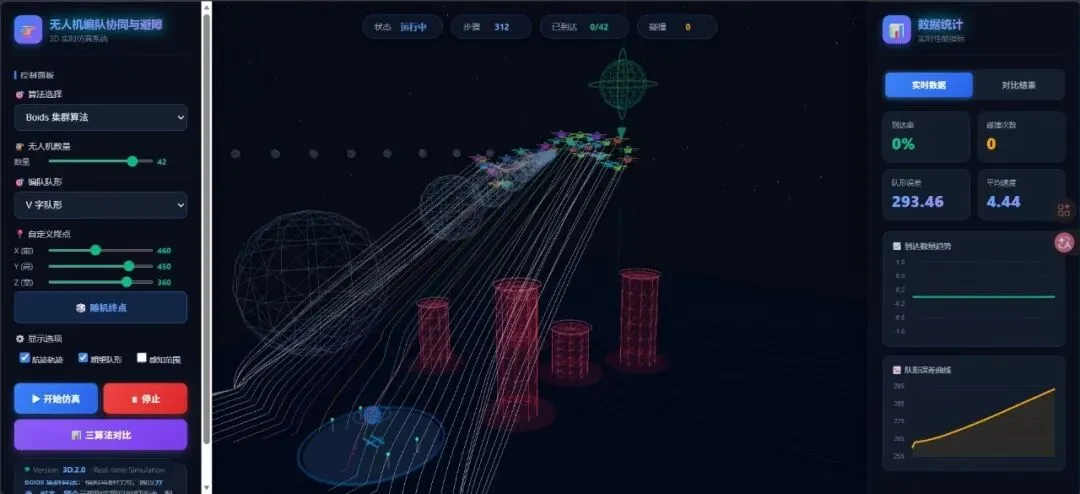
十、实时可视化:48000 行的前端
前端是一个 48KB 的单文件 HTML,包含:
- • Three.js 3D 场景:无人机模型、障碍物圆柱体、地面网格、目标标记
- • Chart.js 图表:编队误差曲线、速度曲线、到达率统计
WebSocket 每帧推送的数据包括:
{ "step": 42, "positions": [[x, y, z], ...], "arrived": [true,false, ...], "collisions": 0, "form_error": 12.34, "n_arrived": 5}
通信效率
每帧数据量约为 n × 3 × 8 bytes (positions) + n bytes (arrived) + 20 bytes (metadata) ≈ 400 bytes(12 架无人机)。以 30fps 的推送频率计算,带宽需求仅 12KB/s——WebSocket 完全胜任。
后端的推送频率由仿真速度决定。每帧 time.sleep(0.002) 意味着最快约 500fps 的推送能力,但实际受限于计算速度。
十一、算法对比:谁更强?
三种算法各有千秋,适用场景截然不同:
| | | |
|---|
| 到达率 | | | |
| 队形精度 | | | |
| 避障安全 | | | |
| 计算效率 | | | |
| 通信依赖 | | | |
| 可扩展性 | | | |
| 理论基础 | | | |
深入对比分析
APF 的优势与局限:
- • 优势:无需机间通信,每架无人机独立决策,适合通信受限场景
- • 局限:局部极小值是理论硬伤,无法通过参数调优完全解决
Consensus 的优势与局限:
Boids 的优势与局限:
- • 优势:纯局部感知,不需要任何通信基础设施,最易扩展
混合策略的可能性
一个有趣的方向是自适应混合:在开阔区域用 Boids(高效),接近障碍物时切换到 APF(安全),到达目标后用 Consensus(精确)。这需要设计一个状态切换逻辑和平滑过渡机制。
十二、工程启示:教科书 vs 真实世界
这个项目最大的价值不在于算法有多新,而在于展示了从教科书算法到可工作系统之间的巨大鸿沟,以及如何用工程手段填平它。让我把这些工程智慧系统化:
1. 力饱和——防止任何一个力分量爆炸
教科书:F = k · x(线性)工程:F = k · min(x, x_max)(饱和非线性)
为什么:线性力在极端条件下会产生荒谬的加速度,导致数值不稳定或物理穿越。
2. 优先级混合——避障 > 保队形 > 追目标
教科书:所有力简单叠加 F = F1 + F2 + F3工程:高优先级的力压制低优先级的力
为什么:当两个力方向矛盾时,简单叠加会导致"拉锯"和振荡。优先级混合确保了关键任务(安全)始终被执行。
3. 三层防护——预测 → 速度裁剪 → 位置硬约束
教科书:一种碰撞检测方法就够了工程:每一层都可能失效,所以要有冗余
为什么:预测可能漏检(速度方向变化),速度裁剪可能不够(加速度太大),只有位置硬约束是最终的"安全网"。
4. 子步积分——消除隧道效应
教科书:x += v · dt工程:for sub in range(6): x += v · dt/6
为什么:大时间步 + 高速度 = 穿越薄障碍物。子步积分是最简单有效的解决方案。
5. 渐进收敛——到达后不急着"锁死"
教科书:if dist < threshold: arrived = True工程:先宽松捕获,再渐进精调
为什么:过高的精度要求会导致"永远到不了"(Zeno 效应),而直接锁死会在有扰动时产生突变。
6. 软碰撞——对已编队的无人机放宽间距
教科书:统一的安全距离工程:根据状态动态调整安全距离
为什么:编队位置是精心规划的,用正常间距去检查会破坏编队。只在真正危险时(物理重叠)才干预。
7. 隐式状态机——不同阶段用不同策略
教科书:一个控制器跑到底工程:起飞、巡航、到达、收敛四阶段分别处理
为什么:不同阶段的控制目标相互矛盾。混在一个控制器里,参数会打架。
十三、与前沿研究的连接
本系统虽然代码精简,但其设计思路与当前无人机集群研究的前沿方向高度一致:
ORCA(Optimal Reciprocal Collision Avoidance)
ORCA 是目前多智能体避障的"黄金标准"算法,其核心思想是:每个智能体在速度空间中选择一个速度,使得与其他智能体的碰撞时间最大化。本项目的"雷达预测 + 切向转向"本质上是 ORCA 的一种启发式简化——不做精确的速度空间优化,而是用预测碰撞 + 切向绕行的直觉方法达到类似效果。
深度强化学习(DRL)方法
近年来,用深度强化学习训练无人机集群的策略越来越流行(如 PRM-RL、CrowdNav)。DRL 的优势是能学到复杂非线性策略,劣势是缺乏可解释性和安全保证。本项目的方法是完全可解释的——每个力分量都有明确的物理含义,这对于安全关键应用(如载人无人机)至关重要。
分布式模型预测控制(DMPC)
DMPC 是 Consensus 协议的"升级版"——每个智能体不仅考虑当前状态,还预测未来 N 步并做联合优化。本项目的一致性协议可以看作 DMPC 的一步近似——只看当前误差,不做多步预测。
十四、如何运行
# 安装依赖pip install flask flask-socketio numpy# 启动系统python app.py# 浏览器访问# http://127.0.0.1:5000
打开浏览器,选择算法、编队队形、无人机数量,点击"开始仿真",就能实时看到无人机编队穿越障碍物的 3D 动画。还可以点击"算法对比"同时运行三种算法进行 PK。
结语
这个项目的代码量不大,但麻雀虽小五脏俱全。它涵盖了多智能体系统、势场规划、一致性控制、仿生集群、碰撞检测、物理仿真等多个领域的核心知识点。
更重要的是,它揭示了一个常被学术文献忽略的真相:算法的理论是冰山的一角,让算法在真实(或仿真)环境中稳健运行,才是冰山水面下的功夫。 力饱和、优先级混合、三层防护、子步积分、渐进收敛、软碰撞、状态机——这些都不是论文里会重点写的内容,但每一个都是让系统真正"跑起来"的关键。
如果你也在做多无人机协同相关的研究或开发,希望这篇文章能给你一些工程实现上的启发。也欢迎在评论区讨论:如果让你来设计,你会如何在理论优美性和工程实用性之间做取舍?
如果觉得有用,欢迎点赞、在看、转发三连
完整代码已开源,获取方式见评论区。