M300上运行 Linux + RT-Thread 双系统
- 2026-07-01 07:14:04
在前文M300上双系统初探,演示了如何在Linux上的一个cpu核上跑独立的固件。M300 的 CPU0 / CPU1 的两颗同构的 XBurst2 核,共享了 512KB L2 和 DDR,当前Linux 默认 SMP 把两个核均使用了,是否可以让 CPU0 运行 Linux,CPU1 独立运行 RT-Thread,两个系统通过共享内存和核间中断通信?这样既可以保持linux复杂的功能,又可以通过RT-Thread实时系统支持实时性高的外设处理。
本文演示:AMP(Asymmetric Multi-Processing),CPU0 跑 Linux(网络栈、文件系统、应用),CPU1 跑 RT-Thread(实时任务、中断响应、FinSH 控制台),两套系统通过共享内存和 mailbox 通信,不需要改linux内核代码,只加一个内核驱动模块。
注意:本文基于 SDK v7, Linux 5.10.186, RT-Thread 自定义移植。
双系统的场景很直接:
CPU0 → Linux(网络栈、文件系统、MQTT broker、云端对接)CPU1 → RT-Thread(微秒级 GPIO 响应、i2c/spi、电机控制、实时 shell)└── 共享内存 + 核间 mailbox 通信
M300 已有的 `isolcpus=1` 是软隔离,CPU1 还在跑 Linux 的 idle 线程。本文做的是硬隔离:把 CPU1 从 Linux 内核里彻底隔离,独立跑 RT-Thread。
硬件架构
M300 的 CPU 三核结构:
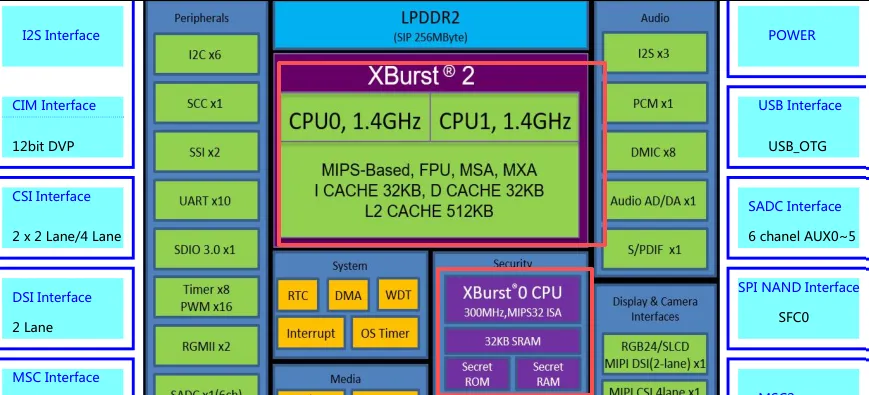
本文操作的是 XBurst2 CPU1,不是 MCU 小核。CPU1 有完整的 FPU、MSA、DDR 访问能力。
控制 CPU1 的关键寄存器
控制 CPU1 启动/复位的核心硬件叫 CCU (Core Control Unit),物理地址 `0x12200000`:
| 寄存器 | 偏移 | 描述 ||------------|---------|---------------------------------------|| `CCU_CSRR` | `+0x40` | Core Soft Reset Register — bit1=1 按住复位, bit1=0 释放 || `CCU_CSSR` | `+0x20` | Core Soft Reset Status — bit1 只读,反映复位状态 || `CCU_RER` | `+0xf00` | Reset Entry Register — CPU1 启动时从哪里取第一条指令 |
内核中代码 `arch/mips/xburst2/core/smp.c` 的 `xburst2_boot_secondary()` :
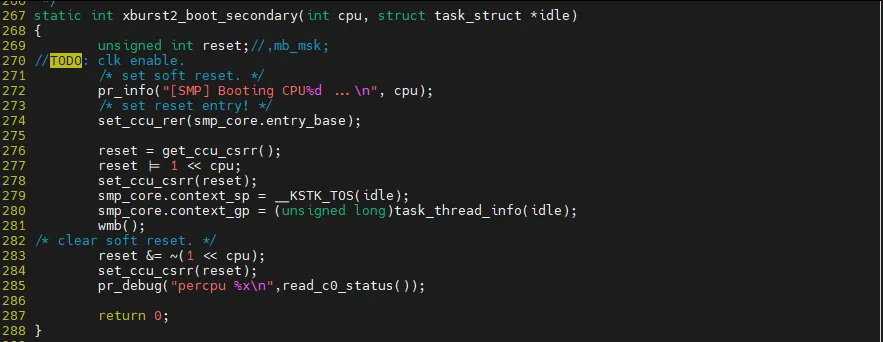
通过这三个寄存器启动 CPU1 的。本文的内核模块复用同一套硬件,但把启动地址从内核的 bounce code 换成 RT-Thread 固件。
第一步:把 CPU1 从 Linux 里独立出来
在 uboot bootargs 加 `maxcpus=1`,Linux 启动时不让 CPU1 上线。

启动后,可以观察到linux中只有一个cpu核心。
增加核心驱动,核模块 `cpu1_loader.ko` 的核心函数 `cpu1_boot()`:
staticintcpu1_boot(void) {unsigned int csrr;// 1. 按住 CPU1 复位csrr = ccu_rd(CCU_CSRR);csrr |= (1 << 1);ccu_wr(CCU_CSRR, csrr);udelay(10);// 2. CPU1 复位中,安全复制固件到 DDR{void __iomem *fw = ioremap(FW_PHYS, FW_SIZE);memcpy_toio(fw, cpu1_fw, sizeof(cpu1_fw));iounmap(fw);}// 3. 配置 CPU1 的 CORE_OST(独立计时器)// 4. 配置 CCU 中断路由(OIMR, MIMR, PIMR)// 5. 设置启动地址ccu_wr(CCU_RER, FW_KSEG1); // 0xAF000000// 6. 释放复位 → CPU1 从 RER 地址开始执行csrr &= ~(1 << 1);ccu_wr(CCU_CSRR, csrr);udelay(100);}
固件放在 DDR 的固定物理地址 `0x0F000000`(KSEG1: `0xAF000000`),预留 1MB:
0x0F000000 ┌──────────────────┐│ RT-Thread 固件 │ ~40KB (代码+只读数据)0x0F00A000 ├──────────────────┤│ BSS / 堆 │0x0F010000 ├──────────────────┤│ MAGIC 魔术字 │ 验证 CPU1 启动用0x0F0100D0 ├──────────────────┤│ mailbox 通信区 │ 核间 IPC0x0F010200 ├──────────────────┤│ debug 共享窗口 │ CPU0 通过 devmem 读取0x0F020000 └──────────────────┘
第二步:RT-Thread 固件
固件启动流程:
CCU 释放 CPU1 复位│▼start.S ── 拷贝 EBase 页面到 0xAF020000│ 设置 EBase = 0xAF020000│ 跳转到 bsp_entry()▼rtthread_startup()├── rt_hw_board_init()│ ├── rt_system_heap_init() // 堆│ ├── rt_hw_tick_init() // CORE_OST 系统时钟│ ├── UART8 管脚复用│ ├── UART8 寄存器配置 (DLL=13, FCR, LCR, IER)│ ├── INTC 安装 UART8 中断处理│ └── UART8 IER.RDR = 1├── rt_components_init()│ ├── finsh_system_init() // 创建 FinSH shell 线程│ │ (INIT_APP_EXPORT, .rti_fn 段)│ └── 其他自动初始化├── 调度器启动 → main 线程 (优先级10)│ ├── 写 MAGIC 魔术字│ └── return (让出 CPU)│▼FinSH shell 线程 (优先级20) ── 打印 "msh>" 提示符└── 阻塞等待 UART8 输入 (rt_hw_console_getchar)
第三步:中断系统
M300 上有 4 个 per-core 中断控制器(INTC0~3),每个 CPU 核独立一个。M300 PM 24章, Table 24-1 列出了 4 个 per-core INTC:


每个 INTC 有相同的寄存器布局:
| 寄存器 | Group0 | Group1 | 属性 ||---------------|---------|---------|-----|| ICSR (源状态) | `+0x00` | `+0x20` | R || ICMR (屏蔽) | `+0x04` | `+0x24` | RW, 复位=全屏蔽 || ICMSR (置屏蔽) | `+0x08` | `+0x28` | W || ICMCR (清屏蔽) | `+0x0C` | `+0x2C` | W || ICPR (挂起) | `+0x10` | `+0x30` | R |
中断到达 CPU1 后的完整处理链路:
vectors.S (EBase=0xAF020000, offset 0x180)│├─ ExcCode==0 (中断) → 计数器+1 → jr _interrupt_handler└─ ExcCode!=0 (真实异常) → 保存 Cause/EPC/BadVAddr → 停机│exception.S: _interrupt_handler│ 保存全部 32 个寄存器│ ext a2, Cause, 8, 8 # 提取 IP[7:2]│├─ IP3 (mailbox) → rt_interrupt_enter → mailbox_isr → rt_interrupt_leave├─ IP2 (INTC) → rt_interrupt_enter → intc_dispatch → rt_interrupt_leave└─ IP4 (OST) → rt_interrupt_enter → ost_tick_isr → rt_interrupt_leave│ └─ 检查 rt_thread_switch_interrupt_flag│ 若需切换 → 上下文切换▼恢复 32 个寄存器 → eret
这里有一个关键的保护机制:如果一个中断源挂起了但没有注册 handler,intc_dispatch 会自动把它屏蔽(写 ICMSR)。否则中断源会不断产生 IP2 风暴,停止整个 CPU。
第四步:系统时钟
每个 XBurst2 核都有自己的 CORE_OST(`0xB2100100` 是 CPU1 的),不需要经过 INTC,直接连 IP4。写在rt-thread的board.c的函数`ost_tick_isr()`:
void ost_tick_isr(void) {core_ost[1] = 0; // OSTER = 0core_ost[3] = 0xFFFFFFFE; // OSTFR 清 bit0core_ost[2] = 1; // OSTCR 清计数器core_ost[1] = 1; // OSTER = 1rt_tick_increase(); // 通知 RT-Thread 调度器
设置 OST 比较值为 240000(100Hz tick @ 约 24MHz OST 时钟)。CORE_OST 的 IP4 路由由 CCU OIMR bit1(+0x1a0)控制,`cpu1_boot()` 已设好。
第五步:核间通信
CPU0 和 CPU1 之间通过 CCU mailbox + 共享内存 通信:
CPU0 (Linux) CPU1 (RT-Thread)│ ││ 写数据到共享内存 (0x0F0100E0) ││ 写 u32 到 CCU 邮箱 (0x12201004) ││ │ ││ └── IP3 → CPU1 ────────────→ mailbox_isr()│ 读取邮箱,处理数据,写响应到共享内存│ ││ kthread 轮询共享内存 ←───────────
Linux侧:
# echo 0x42 > /sys/kernel/cpu1_send # 发一个 u32 给 CPU1# cat /sys/kernel/cpu1_recv # 读 CPU1 的回复
固件cpu1_loader 里跑了一个 `recv_poll_fn` 内核线程,每 10ms 读一次共享内存,检测到变化就 `sysfs_notify()` 通知用户态。
测试
开发板启动后,使用串口程序连接开发板uart1,在linux上执行:
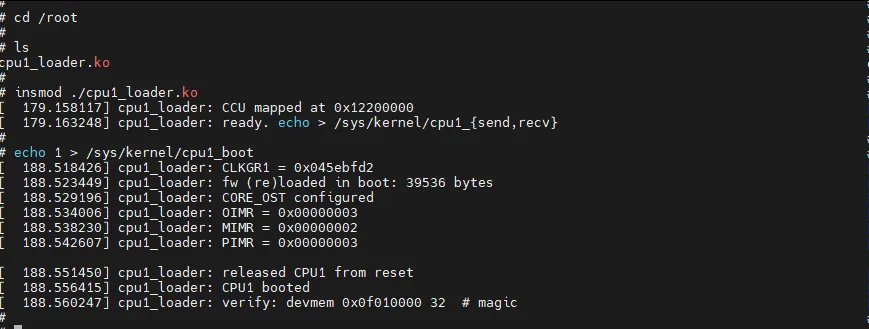
可以看到手工加载内核模块驱动后,通过sysfs启动rt-thread固件,这时linux是通过uart1与用户继续保持联系,而rt-thread配置为uart8,pc通过串口软件连接uart8后:
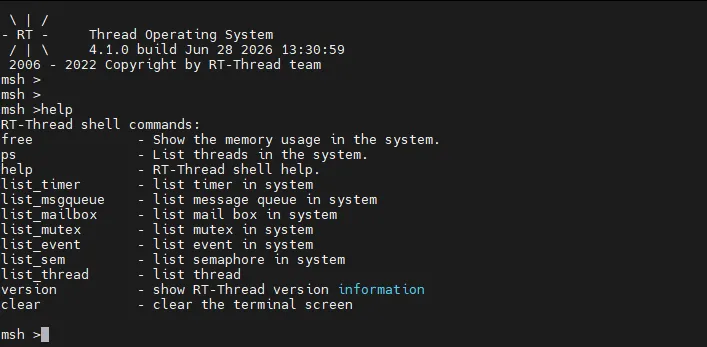
可以观察到rt-thread正确在uart8上显示启动信息,并通过fsh与用户保持连接:
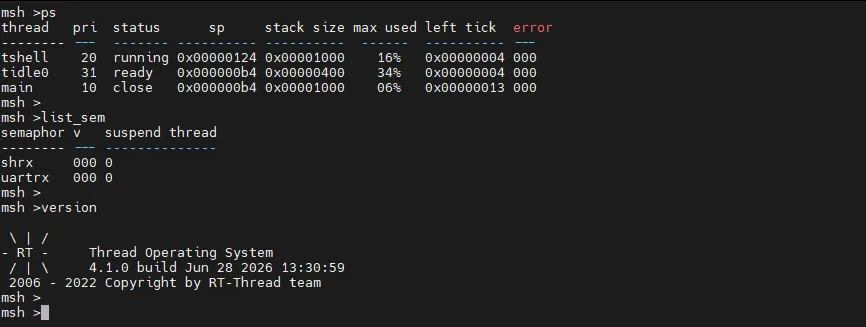
linux与rt-thread分别在M300的两个cpu核心上正常运行。
使用下述方法测试linux与rt-thread间通信:
Linux (CPU0) RT-Thread (CPU1)│ ││ echo > /sys/kernel/cpu1_send ││ └─ writel(0x42, CPU1_mbox) ││ │ ││ └── IP3 ─────────────────→ mailbox_isr()│ 读邮箱 = 0x42, 清邮箱│ 写 *resp = 0x42 + 1 = 0x43│ ←────────── 共享内存 (0x0F0100E0)│ ││ poll 线程读到 0x43 ││ sysfs_notify → cpu1_recv ││ │cat /sys/kernel/cpu1_recv → 0x00000043

可以观察到linux侧获取返回的数字已经加1。

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- python智能体第一天
- 把它背下来,你就是Python岗的天花板啦!
- Python没你想的那么难,但也没那么轻松.
- 【Linux 系统监控】Node Exporter + Prometheus + Grafana
- UV vs pip vs Conda:Python环境管理应该怎么选
- 66个Python练手项目,推荐给缺少Python项目实战经验的人
- 阿里、字节都爱问:Python为什么不能把 List 当默认参数?无数程序员栽在这里
- Python调用DeepSeek花费3.4元做了6670个客观题正确率为94.3%
- 爬虫入门必收!这10个Python函数,帮你搞定90%的数据抓取难题
- 后悔没早看到!Python语法顺口溜,一遍就会
