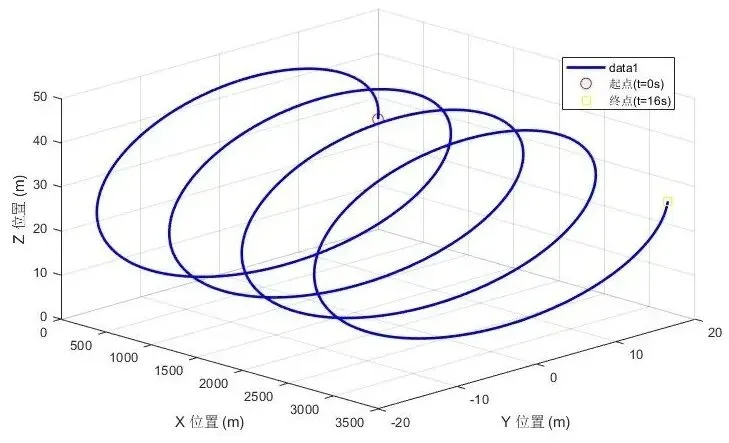
clear; clc; close all;v0 = 200; R = 20; omega = pi/2; t_total = 16; dt = 0.01; t = 0:dt:t_total; phi = omega * t; x = v0 * t; y = R * cos(phi); z = 25+R * sin(phi); vx = v0 * ones(size(t)); vy = -R * omega * sin(phi);vz = R * omega * cos(phi); ax = zeros(size(t)); ay = -R * omega^2 * cos(phi); az = -R * omega^2 * sin(phi); speed = sqrt(vx.^2 + vy.^2 + vz.^2); dot_product = ax.*vx + ay.*vy + az.*vz; radius_calc = sqrt(y.^2 + z.^2); figure('Color','w','Position',[100,100,1400,900]);plot3(x, y, z, 'b-', 'LineWidth',2);hold on;plot3(x(1), y(1), z(1), 'ro', 'MarkerSize',8, 'DisplayName','起点(t=0s)');plot3(x(end), y(end), z(end), 'ys', 'MarkerSize',8, 'DisplayName','终点(t=16s)');xlabel('X 位置 (m)'); ylabel('Y 位置 (m)'); zlabel('Z 位置 (m)');title('标准导弹三维桶滚轨迹(等半径、等螺距)');grid on; legend; view(45,30);