来了!2026 年新开始的一个系列,主要是整理具身智能领域最近发表的提供开源代码或数据集的项目(论文),希望对相关领域的小伙伴有所帮助。获取这些论文的开源项目链接,可以直接在本文中查看。欢迎转发和关注!
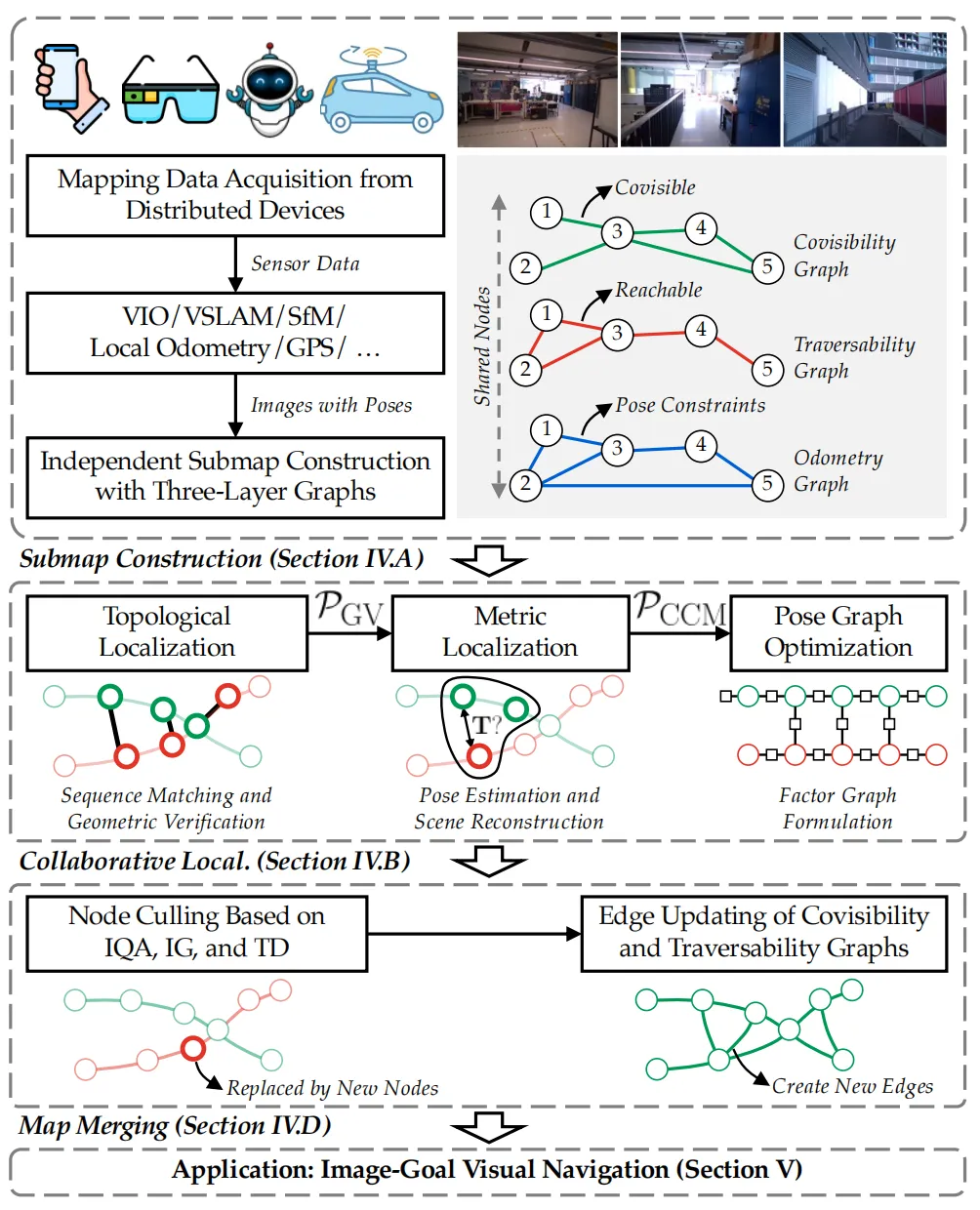
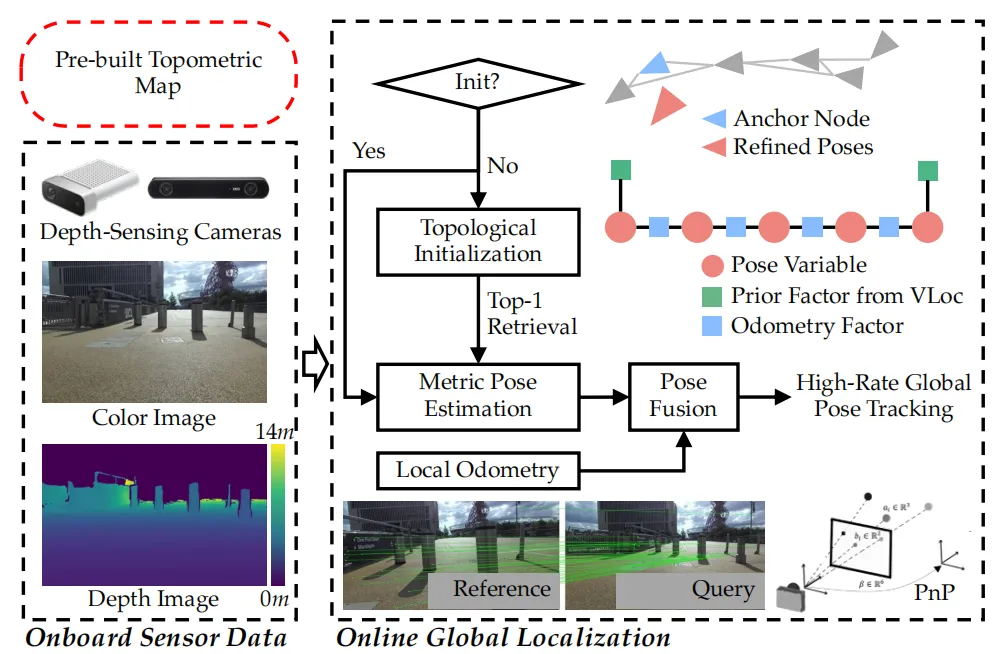
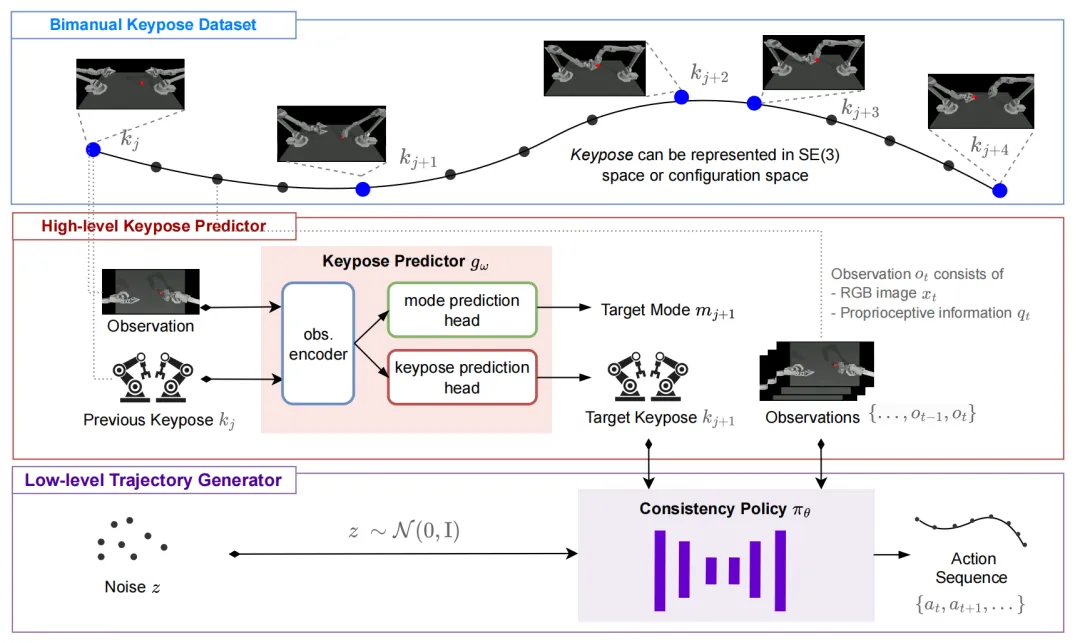
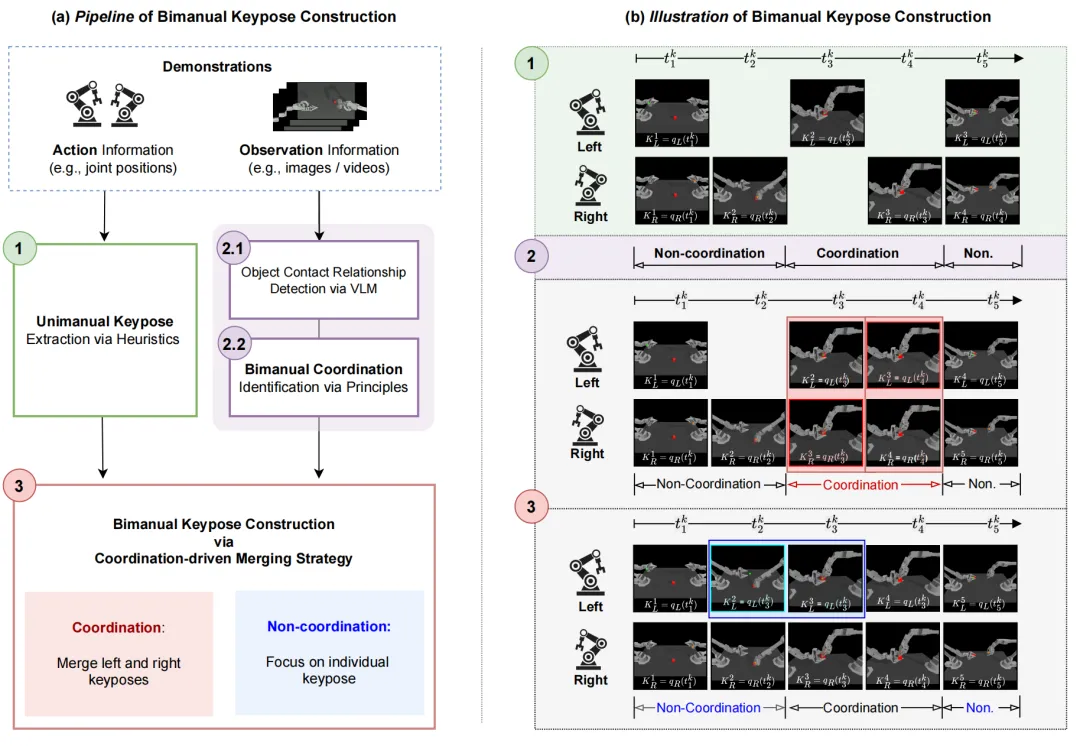
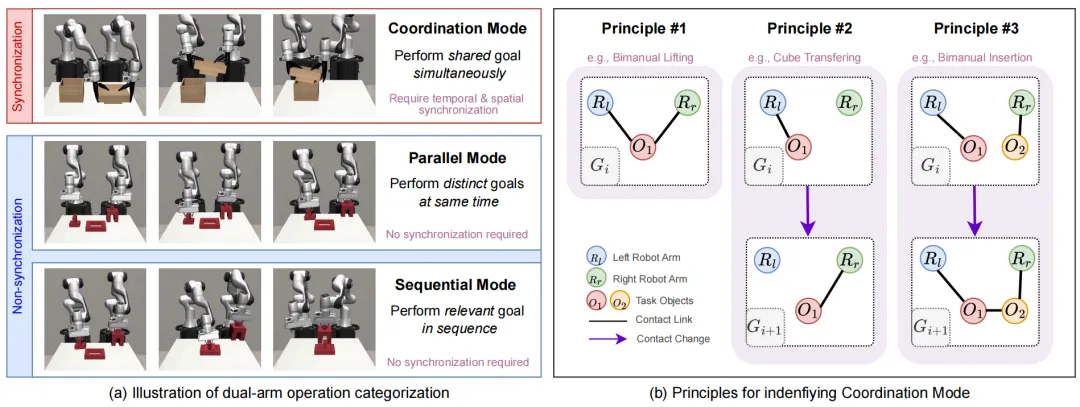
题目:LEARNING DIVERSE SKILLS FOR BEHAVIOR MODELS WITH MIXTURE OF EXPERTS项目链接:https://github.com/robotnav-bot/Di-BM 摘要:通过从大规模的人类演示中学习,模仿学习在机器人操作方面表现出了强大的性能。虽然现有模型在单任务学习方面表现出色,但在实际应用中观察到,它们的性能在多任务设置中会下降,其中任务之间的干扰会导致平均效应。为了解决这个问题,我们建议通过专家混合(Di-BM)学习行为模型的多种技能。 Di-BM 将每位专家与独特的观测分布相关联,使专家能够专注于观测空间的子区域。具体来说,我们采用基于能量的模型来表示专家特定的观察分布,并将它们与相应的动作模型一起联合训练。我们的方法是即插即用的,可以无缝集成到标准模仿学习方法中。对多个现实世界机器人操作任务的大量实验表明,Di-BM 显着优于最先进的基线。此外,针对新任务对预训练的 Di-BM 进行微调,表现出卓越的数据效率和专家学习知识的可重用性。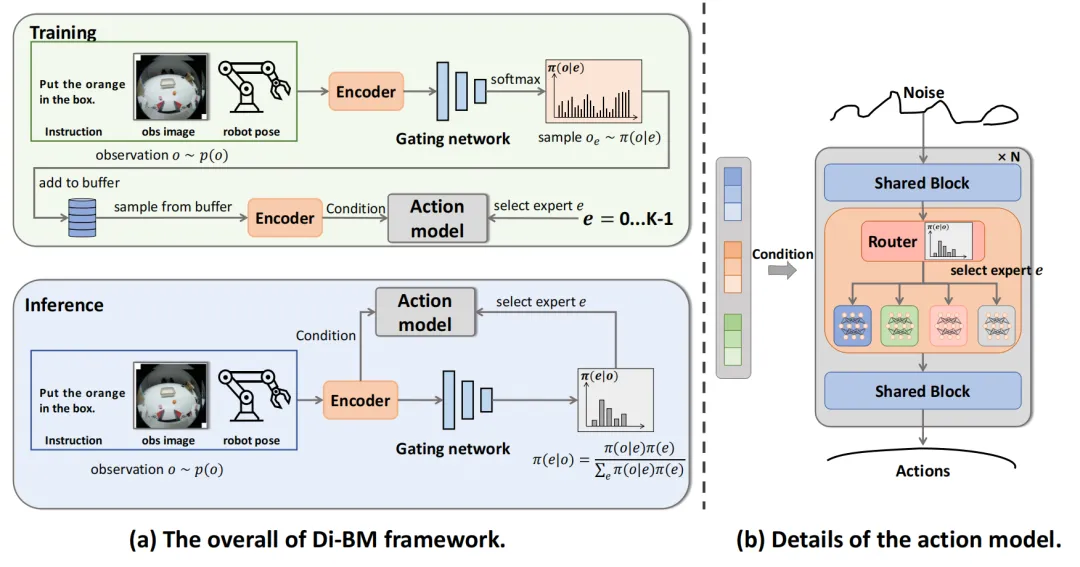 题目:OPENNAVMAP: Structure-Free Topometric Mapping via Large-Scale Collaborative Localization项目链接:https://rpl-cs-ucl.github.io/OpenNavMap page 摘要:可扩展和可维护的地图表示是实现大规模视觉导航和促进机器人在现实环境中部署的基础。虽然跨多会话映射的协作定位提高了效率,但传统的基于结构的方法面临着高昂的维护成本,并且在缺乏特征的环境中或在众包数据典型的重大观点变化的情况下会失败。为了解决这个问题,我们提出了 OPENNAVMAP,这是一种轻量级、无结构的地形测量系统,利用 3D 几何基础模型进行按需重建。我们的方法将基于动态编程的序列匹配、几何验证和置信度校准优化统一到稳健、从粗到精的子图对齐,而不需要预先构建的 3D 模型。对 Map-Free 基准的评估表明,其精度优于运动结构和回归基线,平均平移误差为 0.62m。此外,系统在 15km 的多会话数据上保持全局一致性,地图合并的绝对轨迹误差低于 3m。最后,我们通过模拟和物理机器人上的 12 个成功的自主图像目标导航任务来验证实用性。代码和数据集将公开。”题目:BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency Policies项目链接:https://github.com/JoanaHXU/BiKC-plus. 摘要:机器人因其可靠性和效率而在工业制造中至关重要。他们擅长执行简单且重复的单手任务,但仍然面临双手操作的挑战。这一困难源于协调双臂和处理多阶段过程的复杂性。最近将生成模型整合到模仿学习(IL)中,在应对特定挑战方面取得了进展。然而,很少有方法明确考虑双手任务的多阶段性质,同时也强调推理速度的重要性。在多阶段任务中,任何阶段的失败或延迟都可能随着时间的推移而级联,影响后续子阶段的成功和效率,并最终阻碍整体任务绩效。在本文中,我们提出了一种专为双手操作量身定制的新颖的键条件协调感知一致性策略。我们的框架使用高级关键姿势预测器和低级轨迹生成器实例化分层模仿学习。预测的关键姿势用作轨迹生成的子目标,指示各个子阶段的目标。轨迹生成器被制定为一致性模型,在单个推理步骤中根据历史观察和预测关键姿势生成动作序列。特别是,我们设计了一种创新的方法来识别双手关键姿势,同时考虑到以机器人为中心的动作特征和以任务为中心的操作风格。模拟和现实世界的实验表明,我们的方法在成功率和运营效率方面显着优于基线方法。
题目:OPENNAVMAP: Structure-Free Topometric Mapping via Large-Scale Collaborative Localization项目链接:https://rpl-cs-ucl.github.io/OpenNavMap page 摘要:可扩展和可维护的地图表示是实现大规模视觉导航和促进机器人在现实环境中部署的基础。虽然跨多会话映射的协作定位提高了效率,但传统的基于结构的方法面临着高昂的维护成本,并且在缺乏特征的环境中或在众包数据典型的重大观点变化的情况下会失败。为了解决这个问题,我们提出了 OPENNAVMAP,这是一种轻量级、无结构的地形测量系统,利用 3D 几何基础模型进行按需重建。我们的方法将基于动态编程的序列匹配、几何验证和置信度校准优化统一到稳健、从粗到精的子图对齐,而不需要预先构建的 3D 模型。对 Map-Free 基准的评估表明,其精度优于运动结构和回归基线,平均平移误差为 0.62m。此外,系统在 15km 的多会话数据上保持全局一致性,地图合并的绝对轨迹误差低于 3m。最后,我们通过模拟和物理机器人上的 12 个成功的自主图像目标导航任务来验证实用性。代码和数据集将公开。”题目:BiKC+: Bimanual Hierarchical Imitation with Keypose-Conditioned Coordination-Aware Consistency Policies项目链接:https://github.com/JoanaHXU/BiKC-plus. 摘要:机器人因其可靠性和效率而在工业制造中至关重要。他们擅长执行简单且重复的单手任务,但仍然面临双手操作的挑战。这一困难源于协调双臂和处理多阶段过程的复杂性。最近将生成模型整合到模仿学习(IL)中,在应对特定挑战方面取得了进展。然而,很少有方法明确考虑双手任务的多阶段性质,同时也强调推理速度的重要性。在多阶段任务中,任何阶段的失败或延迟都可能随着时间的推移而级联,影响后续子阶段的成功和效率,并最终阻碍整体任务绩效。在本文中,我们提出了一种专为双手操作量身定制的新颖的键条件协调感知一致性策略。我们的框架使用高级关键姿势预测器和低级轨迹生成器实例化分层模仿学习。预测的关键姿势用作轨迹生成的子目标,指示各个子阶段的目标。轨迹生成器被制定为一致性模型,在单个推理步骤中根据历史观察和预测关键姿势生成动作序列。特别是,我们设计了一种创新的方法来识别双手关键姿势,同时考虑到以机器人为中心的动作特征和以任务为中心的操作风格。模拟和现实世界的实验表明,我们的方法在成功率和运营效率方面显着优于基线方法。