在机器人控制领域,如何实现高性能、高可靠性的关节控制是核心问题之一。今天,我们将通过分析一段实际的C++源码,深入探讨工业机器人控制中PVT(位置-速度-力矩前馈)控制器的设计与实现。这不仅仅是一段代码,更是经典控制理论在工程实践中的具体体现。让我们先理解控制器的核心逻辑。在 pvt_ctrl::calMotorsPVT() 方法中,我们看到这样一个公式:tauDes = PV_enable[i] * pvt_Kp[i]*(motor_pos_des[i]-motor_pos_cur[i]) + PV_enable[i]*pvt_Kd[i]*(motor_vel_des[i]-motor_vel[i]);tauDes = tau_out_lpf[i].ftOut(tauDes) + motor_tor_des[i];
这正是经典的 MIT控制模式 的C++实现: τnew = τff + kp·(qdes - qcur) + kd·(q̇des - q̇cur)- 前馈-反馈复合控制 :力矩前馈 motortordes[i] 提供预期动态,PD反馈纠正跟踪误差
- 增量式设计 :与直接计算目标力矩相比,这种"在前一控制量基础上叠加修正"的模式更符合工业控制器的实现惯例
- 工程细节 :每个关节的使能标志 PV_enable 允许独立开关位置-速度反馈环,这在系统调试和安全保护中至关重要
仔细查看构造函数和计算函数,我们可以看到多层安全保护机制:// 1. 力矩饱和保护if (fabs(tauDes) >= fabs(maxTor[i])) tauDes = sign(tauDes)*maxTor[i];// 2. 关节限位保护(在构造函数中从JSON加载)maxPos[i] = root_read[motorName[i]]["maxPos"].asDouble();minPos[i] = root_read[motorName[i]]["minPos"].asDouble();// 3. 速度限制maxVel[i] = root_read[motorName[i]]["maxSpeed"].asDouble();// 4. 增量位置限制(在重载的calMotorsPVT中)if (fabs(delta) >= fabs(deltaP_Lim)) delta = deltaP_Lim * sign(delta);
- 饱和处理策略 : sign(tauDes)*maxTor[i] 保持力矩方向的同时限制幅值,避免控制方向突变
- 多层限制 :位置、速度、力矩、位置增量四重限制,符合ISO 10218等机器人安全标准的要求
- 可配置性 :所有限制参数通过JSON配置文件加载,适应不同型号的电机和执行器
tau_out_lpf.assign(jointNum, lpf_fst());double fc = root_read[motorName[i]]["PVT_LPF_Fc"].asDouble();tau_out_lpf[i].setPara(fc, timeStepIn);tauDes = tau_out_lpf[i].ftOut(tauDes) + motor_tor_des[i];
- 必要性 :PD控制本质是高通滤波,会放大高频噪声,低通滤波器(LPF)抑制测量噪声和执行器高频抖动
- 前馈通道不滤波 :注意力矩前馈 motortordes[i] 是在滤波器之后加入的,这意味着前馈信号不受滤波器相位影响,保持了其"预见性"
voidpvt_ctrl::dataBusRead(DataBus &busIn);voidpvt_ctrl::dataBusWrite(DataBus &busIn);
这种"数据总线"设计模式将控制算法与通信协议解耦,便于:- 替换不同的通信中间件(ROS、DDS、EtherCAT等)
pvt_ctrl::pvt_ctrl(double timeStepIn, const char *jsonPath)
- 时间步长作为构造参数 :硬实时控制必须明确控制周期
- JSON配置文件 :支持"热重载",可在不重新编译的情况下调整参数
- 按关节名索引 : motorName 数组与参数JSON的键对应,支持灵活的关节映射
- 无动态内存分配 :所有向量在构造函数中 assign ,避免运行时内存分配导致的不确定性
- 避免虚函数 :代码中未使用虚函数和多态,减少间接调用开销
- 确定性的计算量 :循环次数固定为 jointNum ,最坏执行时间(WCET)可预测
voidpvt_ctrl::calMotorsPVT(double deltaP_Lim){ double delta = motor_pos_des[i] - motor_pos_des_old[i]; if (fabs(delta) >= fabs(deltaP_Lim)) { delta = deltaP_Lim * sign(delta); } double pDes = delta + motor_pos_des_old[i]; // ... 使用pDes而非原始motor_pos_des[i]}
- 增量限制而非直接速度限制 : deltaP_Lim = maxVel * timeStep ,将速度限制转化为位置增量限制
- 一阶保持 : motorposdes_old 存储上一周期限制后的期望位置,实现平滑过渡
- 应用场景 :轨迹生成器输出突变时,防止过大加速度;与上层规划的接口保护
本控制器的定位 :这是一个 工程实用、稳定可靠 的基础控制器,为更高级控制算法(如力控、阻抗控制)提供了底层执行框架。在UR、Franka等协作机器人中,类似架构被广泛使用。- Kp先调 :从较小值开始,逐渐增加直到出现轻微振荡,然后回退20%
- 前馈增益 :通常设为系统惯性估计,可通过频域辨识获得
- 滤波器截止频率 :一般为控制频率的1/5~1/10
案例1:KUKA工业机器人 (位置控制)
控制频率:2 kHz
姿态控制带宽要求:30 Hz
地面反力估计:需要高频信息
滤波器设计:
IMU数据:100 Hz低通 (抑制高频振动)
力传感器:500 Hz低通 (f_s/4)
关节位置:200 Hz低通 (f_s/10)
案例2:Boston Dynamics Atlas (动态平衡)
控制频率:1 kHz
位置环带宽目标:20 Hz
速度环带宽:100 Hz
滤波器截止频率选择:
位置反馈滤波:50 Hz (f_s/20)
速度反馈滤波:200 Hz (f_s/5)
电流环滤波:500 Hz (f_s/2)
// 1. 增加摩擦力前馈补偿double frictionComp = coulombFric[i] * tanh(vel/velThreshold) + viscousFric[i] * vel;// 2. 自适应抗饱和(处理积分饱和)if (torqueSaturated && errorSameSign) { // 暂停积分累积}// 3. 基于模型的前馈tau_ff = M(q_des)·q̈_des + C(q_des, q̇_des)·q̇_des + G(q_des);
这段PVT控制器代码虽然不长,但体现了工业机器人控制的精髓: 在理论正确性的基础上,充分考虑工程实现的可靠性、安全性和可维护性 。从安全限幅到参数配置,从实时性保证到调试支持,每一个设计决策都服务于实际部署的需求。完整代码关注公众号回复"PVT"获取。在机器人技术快速发展的今天,深度学习、强化学习等先进方法层出不穷,但以PID及其变种为代表的经典控制方法仍然是工业应用的基石。理解这些基础控制器的实现细节,不仅有助于我们更好地使用现有机器人系统,也为设计下一代智能控制器提供了坚实基础。技术发展的脉络是传承而非替代 ,今天的先进控制算法,最终也要通过这样严谨的工程实现,才能让机器人在真实世界中安全、精确、可靠地运动。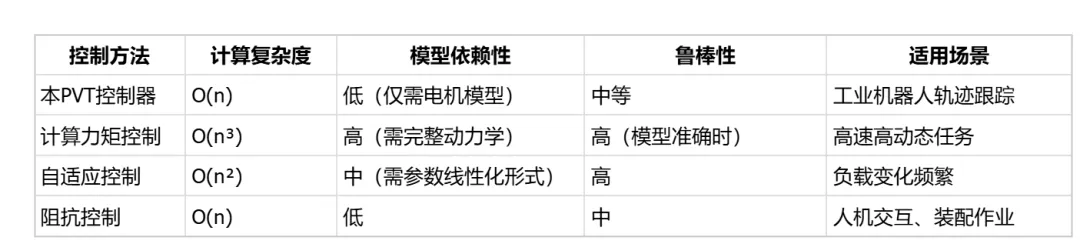
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
