一、前言
① 为什么传统学习Linux驱动的路径总是充满挫折?
初入Linux底层驱动,新手必踩的3大困境,你中了吗?
❶ 软硬件迷局:教程照做、连线无误,设备却毫无反应,黑屏之下无从排查,热情被挫败感消耗殆尽;
❷ 术语轰炸:自旋锁、设备树、中断下半部等名词扎堆,似懂非懂,学了半天仍无从下手;
❸ 孤独求索:卡壳数日查遍资料无果,提问无人回应,学习热情在孤立无援中逐渐冷却。
来我们的训练营,一站式破解所有困境,陪你轻松入门Linux底层驱动✨

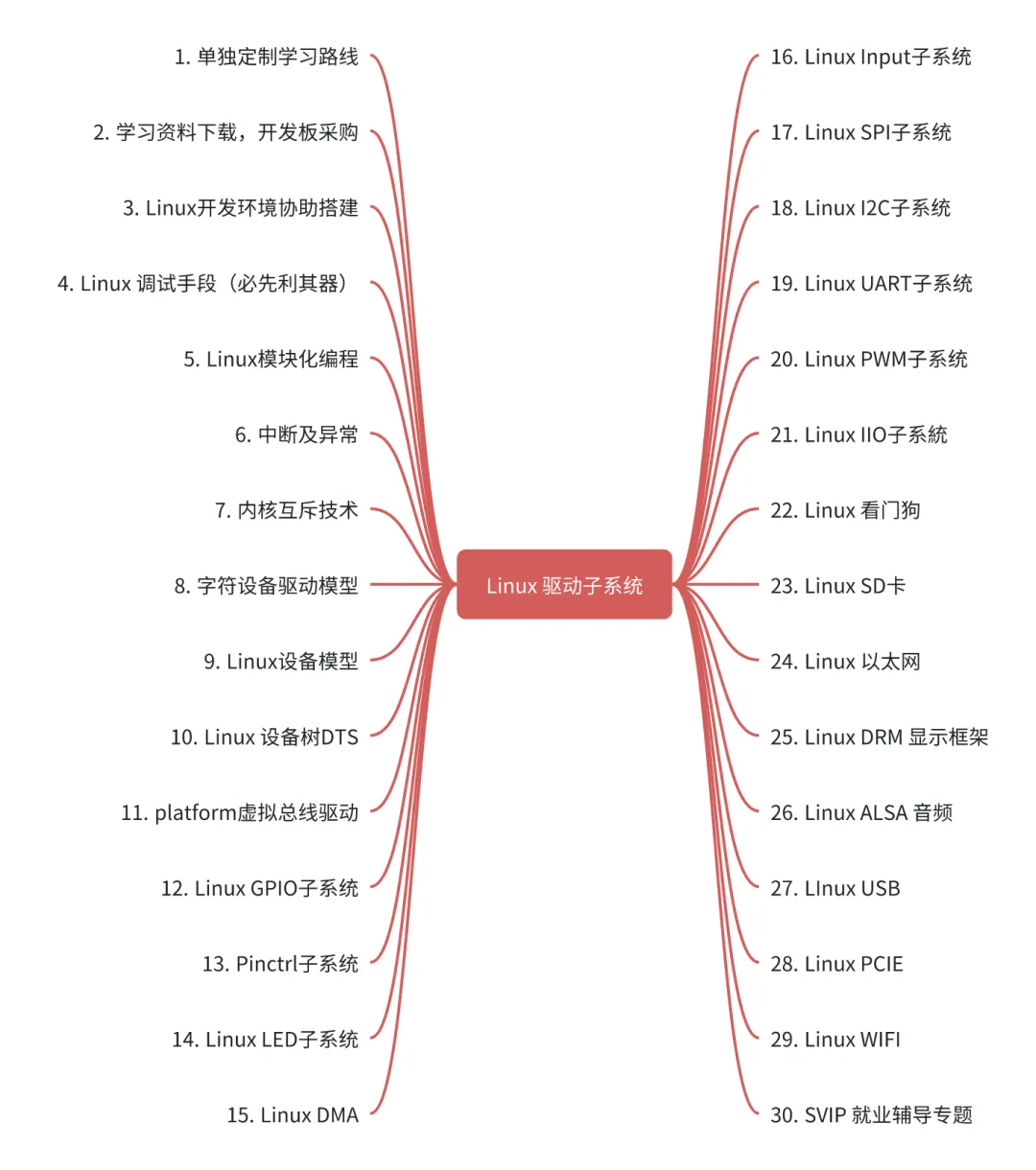
② 完整课程大纲:
二、适合人群
三、课程的各个阶段学习内容
初入Linux底层驱动领域,新手最头疼的就是“不知从何学起”“学了不会用”“越学越混乱”。今天整理了一套系统化学习路线,分3大模块(基础核心→驱动子系统→复杂外设),把必学、重点学、选学的内容讲得明明白白,帮你少走弯路、高效入门!
3.1、基础核心能力(必学)
这部分是Linux驱动的“内功”,学会这些,才能看懂驱动代码、搞定基础开发,缺一不可!
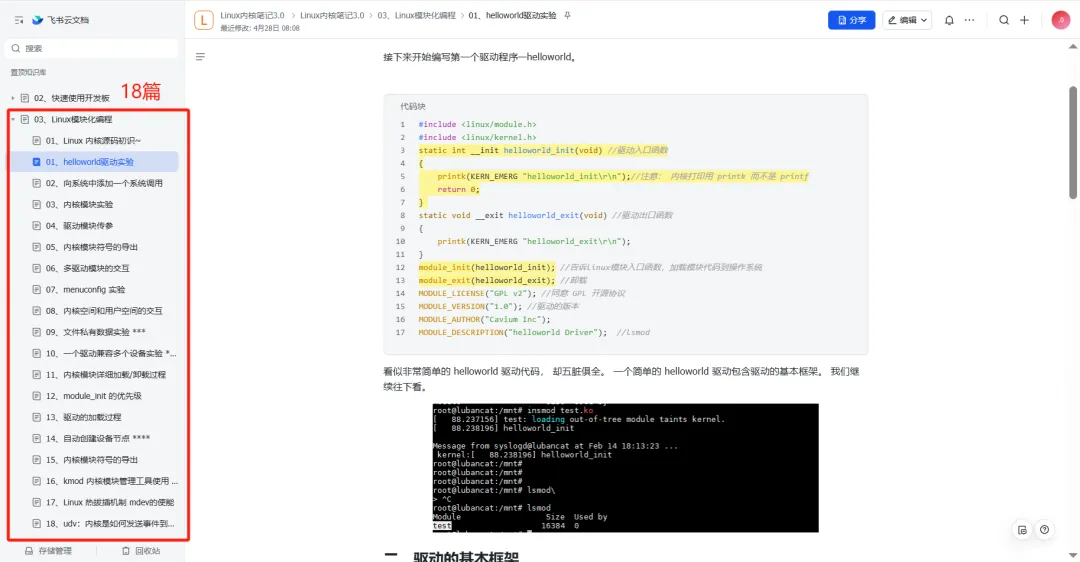
01. Linux模块化编程
核心解析:Linux内核用统一的层次化模型管理所有设备,核心对象有3个——kobject(提供引用计数、sysfs接口等基础功能)、kset(kobject的集合)、ktype(定义kobject的类型)。
sysfs虚拟文件系统(/sys/目录)是这个模型在用户空间的直观体现,而udev守护进程则基于sysfs信息,动态管理用户空间的设备节点。
学习目标:吃透设备模型的核心概念与关联;能通过sysfs查看设备信息;理解udev规则的工作逻辑。
关键重要性:所有现代Linux驱动子系统(如platform、I2C)的底层逻辑都基于此,没掌握它,看驱动代码只会“只见树木,不见森林”。
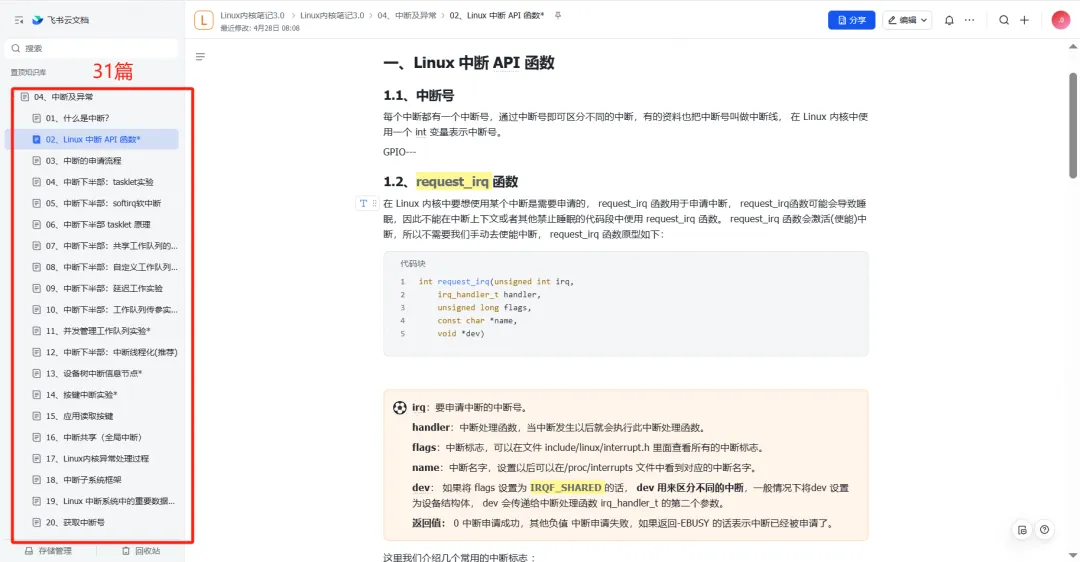
02. 中断及异常
核心解析:中断是硬件与CPU通信的主要方式,核心是用request_irq函数向内核注册中断处理程序。重点掌握“顶半部+底半部”机制:
- 顶半部:快速响应硬件中断,执行最紧急任务(如清除中断标志),速度要快;
- 底半部:承接耗时操作,常见方式有软中断、tasklet(小任务,原子性执行)、workqueue(工作队列,可睡眠)。
学习目标:掌握中断的注册、处理、释放全流程;能根据场景选择合适的底半部机制,理解“为什么要分上下半部”。
关键重要性:处理硬件异步事件(按键按下、数据到达等)的唯一高效方式,不会中断处理,就写不出响应迅速的驱动。
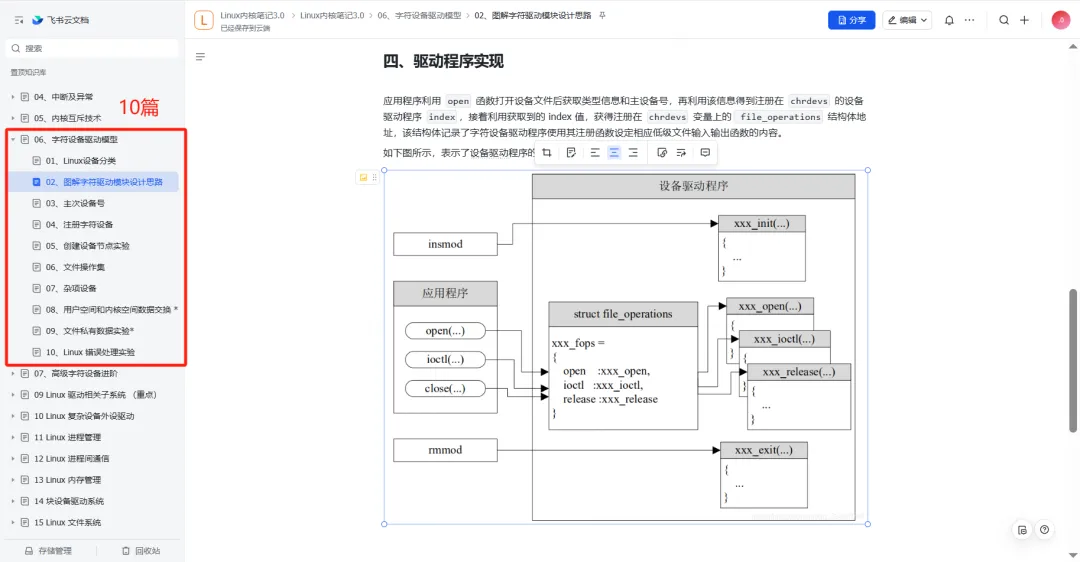
03. 字符设备驱动模型
核心解析:字符设备(LED、按键、串口等)以字节流顺序访问,核心是file_operations结构体——通过填充open、release、read、write等函数指针,定义用户空间访问设备时内核的执行逻辑。
同时需掌握设备号的申请与分配(alloc_chrdev_region)、字符设备的注册(cdev_init、cdev_add)。
学习目标:能独立编写完整的字符设备驱动,实现基本文件操作,并通过用户空间设备文件访问设备。
关键重要性:最基础、最经典的驱动模型,绝大多数简单非存储类外设都用它,是理解驱动与VFS(虚拟文件系统)接口的基石。
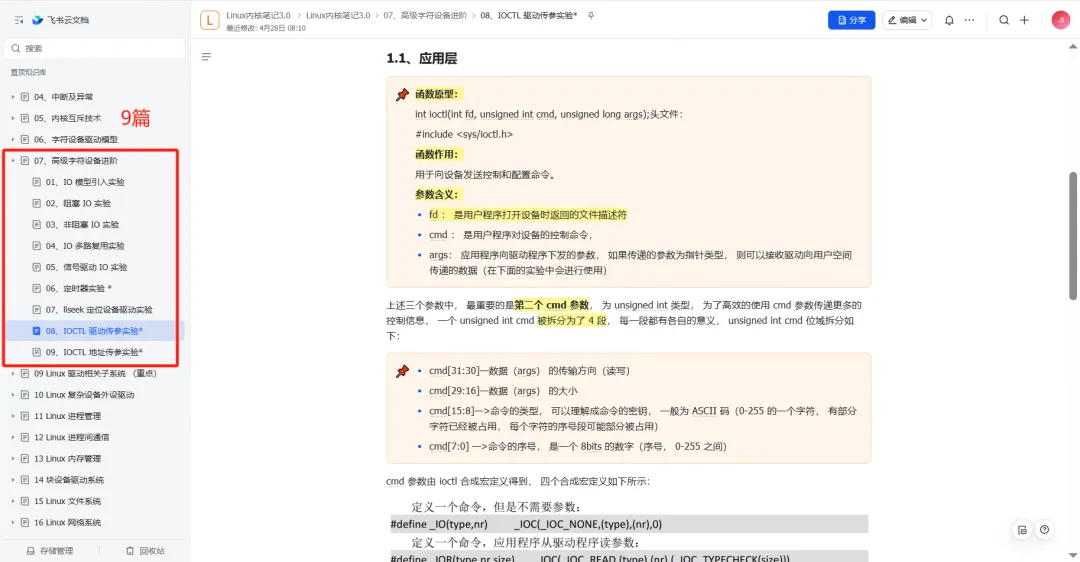
04. 高级字符设备进阶
核心解析:在基础字符设备之上,优化驱动性能与易用性的关键特性,重点掌握4点:
- ioctl:实现自定义命令,完成设备特定配置(如设置波特率、读取寄存器);
- poll/select/epoll:多路复用I/O,支持非阻塞访问,可同时监视多个设备;
- 异步通知:驱动主动通知应用程序事件(如数据到达),无需应用轮询;
- mmap:将设备内存/驱动缓冲区映射到用户进程地址空间,实现“零拷贝”,提升大数据传输效率。
学习目标:理解并实现这些高级特性,优化驱动的性能与交互体验。
关键重要性:高性能、低延迟驱动的核心,在数据采集、音视频处理等场景中不可或缺。
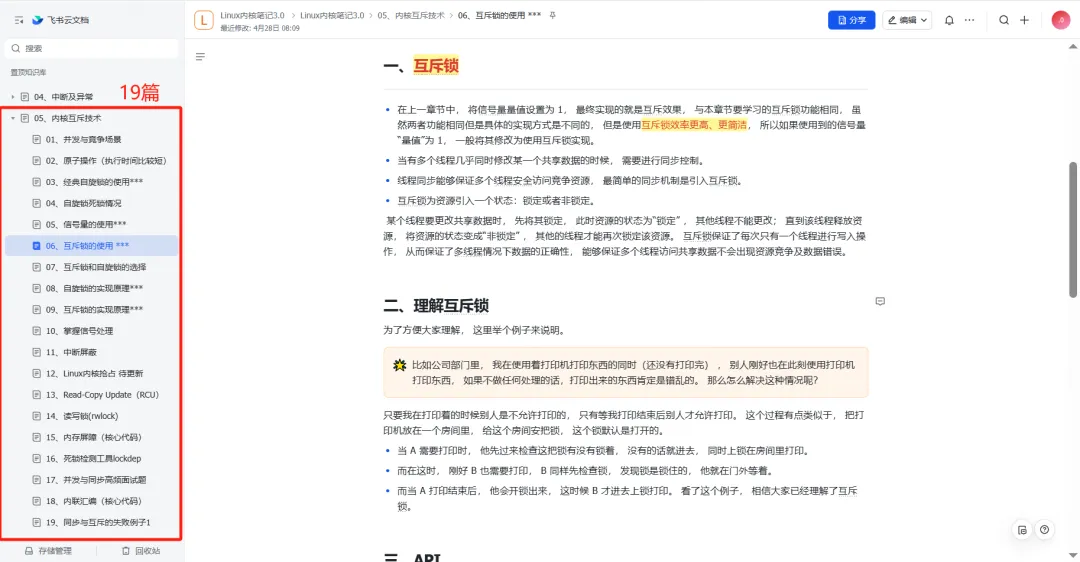
05. 内核互斥技术
核心解析:多核/多线程环境中,驱动多执行路径可能访问共享数据(全局变量、硬件寄存器),导致竞态条件,内核提供4种核心同步机制:
- 自旋锁:短期等待时使用,忙等待、不可睡眠,适用于中断上下文和持有锁极短的场景;
- 信号量:获取不到锁时可睡眠,适用于持有锁时间较长的场景;
- 互斥体:信号量简化版,用法直观,限制更多(如只能由持有者解锁);
- RCU:读-拷贝-更新,无锁同步,读多写少场景性能极高,实现较复杂。
学习目标:能分析驱动中的并发风险,根据场景选择最合适的同步机制。
关键重要性:驱动在多核环境下稳定运行的生命线,也是内核面试必考知识点。
3.2、Linux驱动子系统(重点必学)
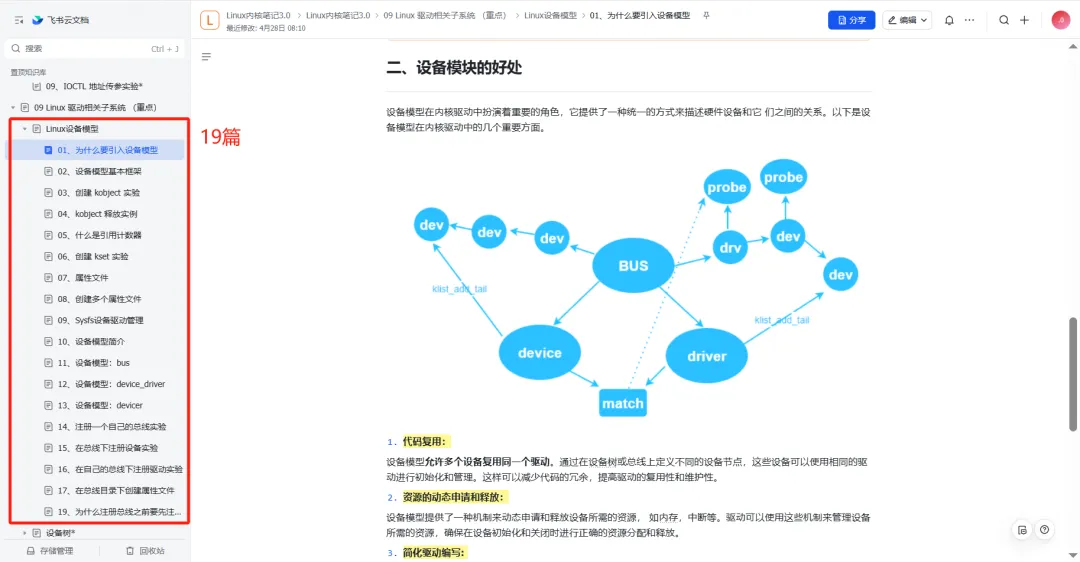
01 Linux设备模型
(与基础核心“Linux模块化编程”一脉相承,此处重点强化应用场景)
核心解析:统一管理所有设备的层次化模型,核心对象kobject、kset、ktype,配合sysfs(/sys/目录)和udev守护进程,实现设备的动态管理。
学习目标:能通过sysfs排查设备问题,理解udev规则配置,打通“内核设备模型→用户空间管理”的链路。
关键重要性:所有驱动子系统的底层逻辑支撑,没掌握它,后续学习platform、I2C等子系统会非常吃力。
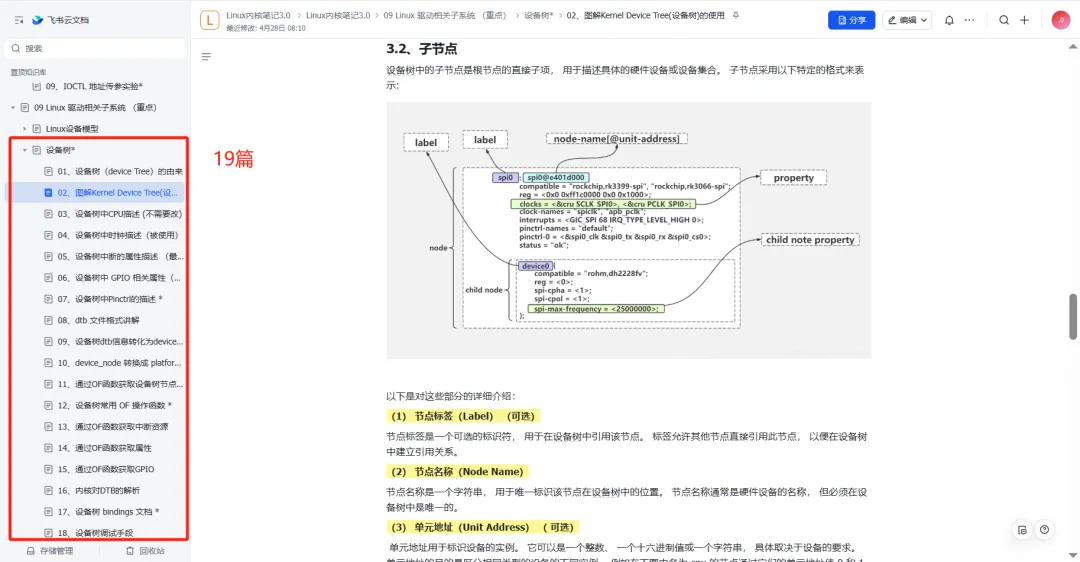
02 设备树
核心解析:用树形结构语言描述硬件配置,以.dts(源文件)和.dtb(二进制文件)存在,彻底将硬件信息(内存映射、中断号、外设连接)从驱动代码中分离。
重点学习:基本语法(节点、属性、compatible兼容性)、编译方法(dtc工具)、内核解析设备树并生成platform_device的过程。
学习目标:能阅读、修改、编写简单设备树;掌握OF API,实现驱动从设备树中获取硬件资源。
关键重要性:现代嵌入式开发(ARM、PowerPC等)的绝对标准,替代了传统板级文件的硬编码,不掌握设备树,几乎无法开展嵌入式Linux驱动开发。
03 设备树overlay
核心解析:动态修改、叠加基础设备树的机制,无需重新编译内核或基础设备树,即可在系统运行/启动时,动态添加、修改设备节点属性。
学习目标:理解overlay核心概念,能编写、加载overlay文件。
关键重要性:适配可插拔扩展硬件(如树莓派HAT扩展板)的核心,大幅提升硬件适配灵活性。
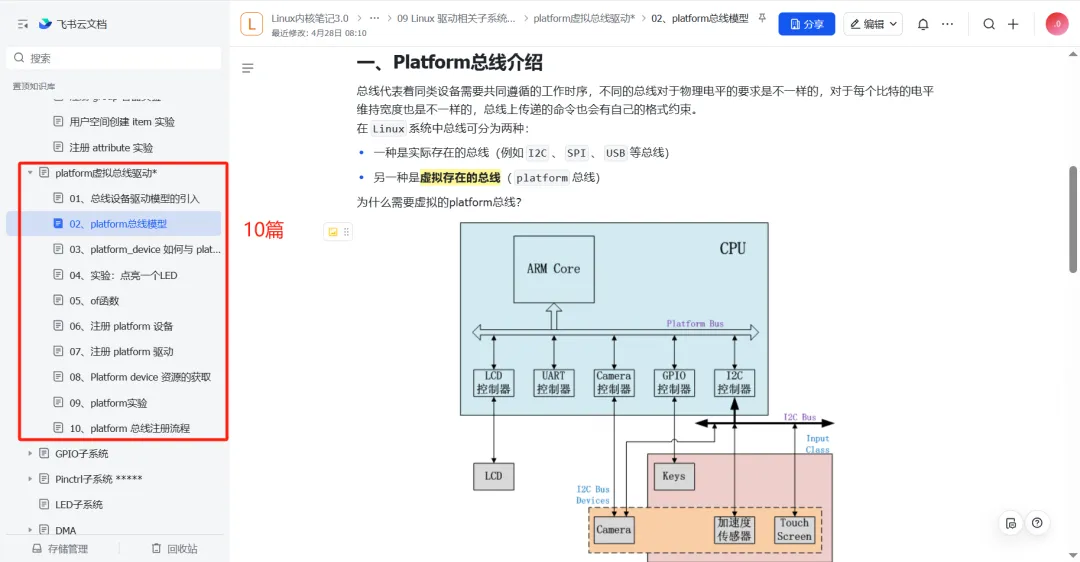
04 Platform虚拟总线驱动
核心解析:虚拟总线,用于将非物理总线(I2C、SPI)挂载的片上外设纳入设备模型,核心是“驱动与设备分离”:
- platform_device:描述设备本身(资源、名称),通常由设备树解析生成;
- platform_driver:描述设备操作逻辑(驱动函数、兼容性匹配);
总线核心负责匹配二者并完成绑定。
学习目标:能编写platform_driver,理解其与platform_device的分离、匹配机制。
关键重要性:Linux驱动框架设计思想的典范,绝大多数片上外设(GPIO控制器、看门狗、ADC)都采用此模型,面试必问。
05 GPIO子系统
核心解析:内核提供的GPIO引脚统一控制接口,通过gpiod_get系列函数获取GPIO描述符,可实现引脚方向设置(输入/输出)、值读取/设置、中断配置。
学习目标:能用GPIO子系统API控制引脚,实现GPIO中断。
关键重要性:控制LED、按键、继电器等简单外设的标准方式,避免直接操作底层寄存器,保证代码可移植性。
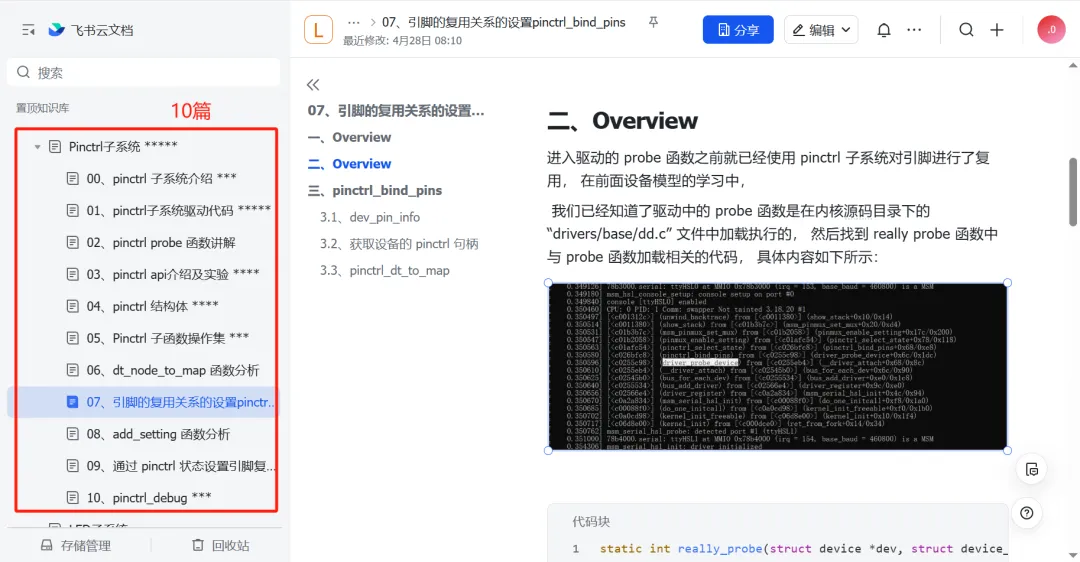
06 Pinctrl子系统
核心解析:现代SoC中,一个物理引脚可复用为多种功能(GPIO、UART_TX、I2C_SCL等),Pinctrl子系统负责管理引脚复用和电气属性(上拉/下拉、驱动强度)配置。
学习目标:理解引脚控制原理,能在设备树中配置引脚复用功能。
关键重要性:解决多功能引脚冲突,驱动开发中(如串口异常),优先排查Pinctrl配置。
07 LED子系统
核心解析:内核标准化LED驱动框架,只需创建led_classdev结构体并注册,内核就会在/sys/class/leds/下生成控制接口,还内置丰富触发器(心跳、定时、磁盘活动等),可轻松实现LED闪烁模式。
学习目标:遵循LED子系统框架编写驱动,熟练使用各类触发器。
关键重要性:体现内核“不重复造轮子”理念,大幅简化LED驱动开发,实现统一控制。
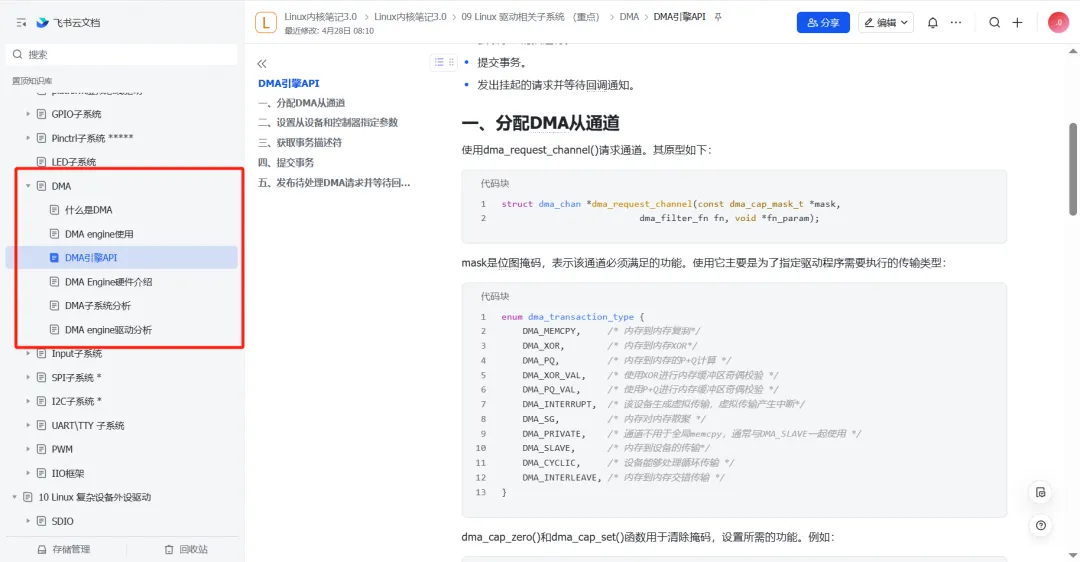
08 DMA
核心解析:直接内存访问,允许外设直接在内存与设备缓冲区之间传输数据,无需CPU持续参与,核心是使用内核DMA API(如dma_alloc_coherent分配一致性DMA内存)建立传输通道。
学习目标:理解DMA原理,掌握基础DMA API使用方法。
关键重要性:大数据量传输(网络数据包、音频流、图像)场景必备,能解放CPU、降低系统负载,是高性能驱动的核心技术。
09 Input子系统
核心解析:所有输入设备(按键、键盘、鼠标、触摸屏)的统一驱动框架,核心是input_dev结构体——驱动需注册设备支持的事件类型(EV_KEY、EV_ABS等)和编码,通过input_event函数上报事件,子系统再分发给用户空间应用(如evdev)。
学习目标:能编写基于Input子系统的输入设备驱动(如按键驱动)。
关键重要性:为用户空间提供统一输入接口,简化应用开发,是输入设备驱动的标准方案。
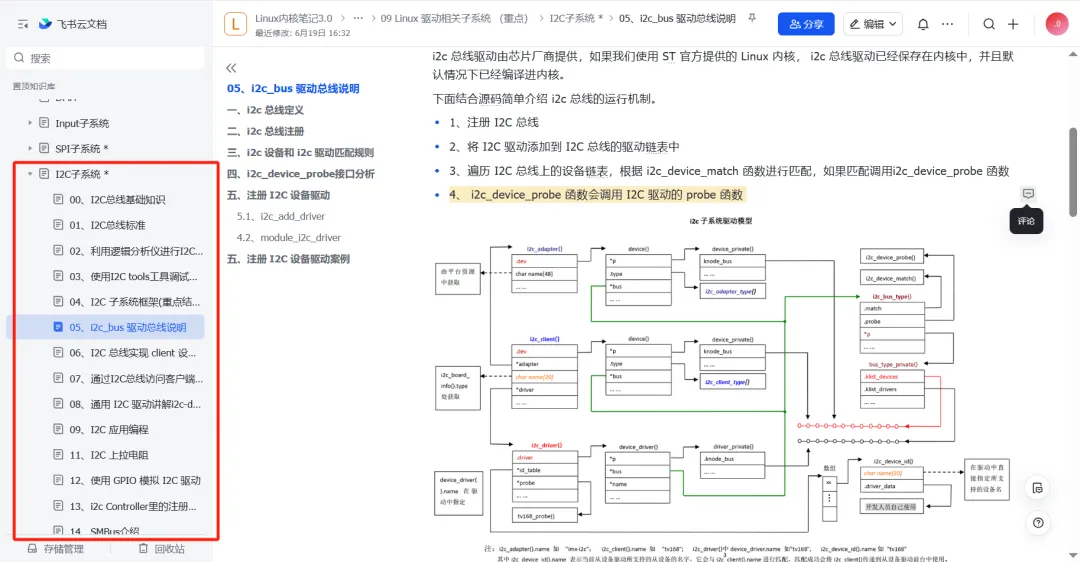
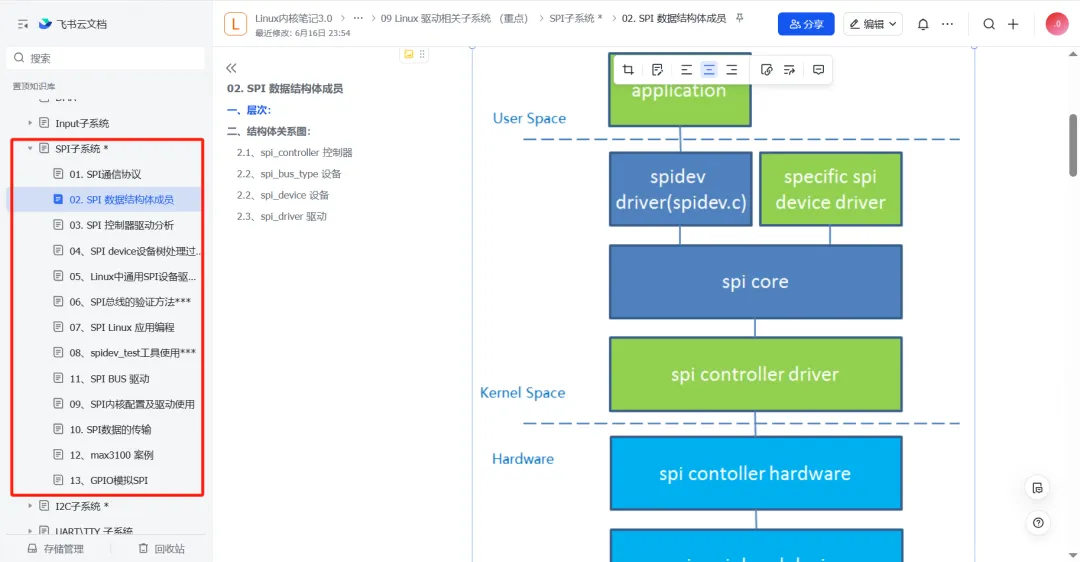
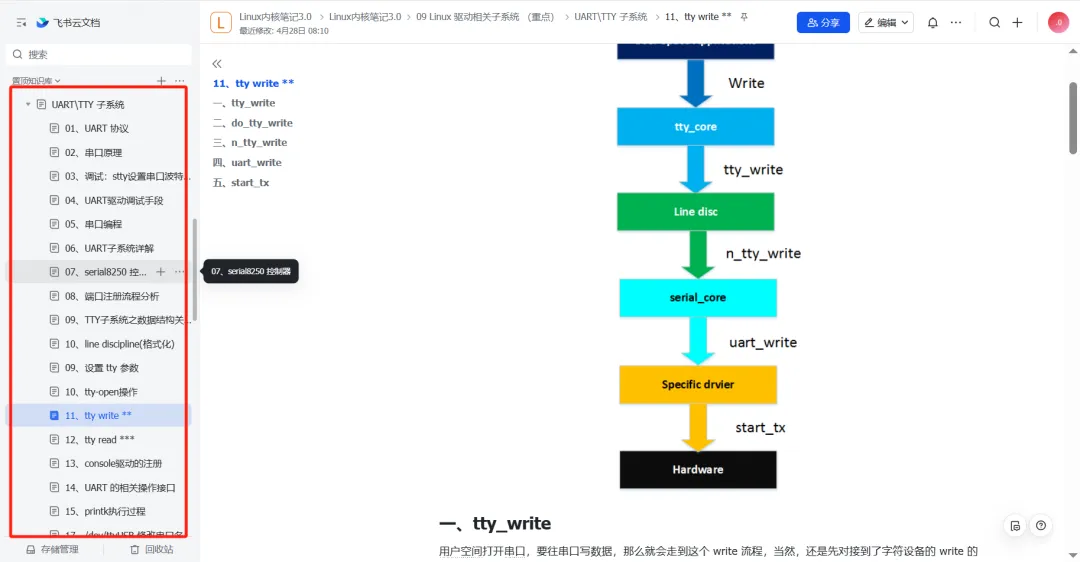
10 I2C/SPI/UART子系统
核心解析:嵌入式最常用的3种串行通信总线,驱动模型各有侧重:
- I2C/SPI:均采用“控制器驱动(adapter)+设备驱动(client_driver)”分离模式,开发者主要编写从设备(传感器、RTC)驱动,通过i2c_driver/spi_driver与设备树匹配;
- UART:基于serial core层,重点是配置串口控制器、实现底层操作函数。
学习目标:能为I2C/SPI传感器(MPU6050、BMP280)编写驱动;理解UART驱动框架。
关键重要性:连接传感器、执行器、通信模块的核心,是嵌入式驱动开发中最常接触的总线。
i2c:
spi:
uart:
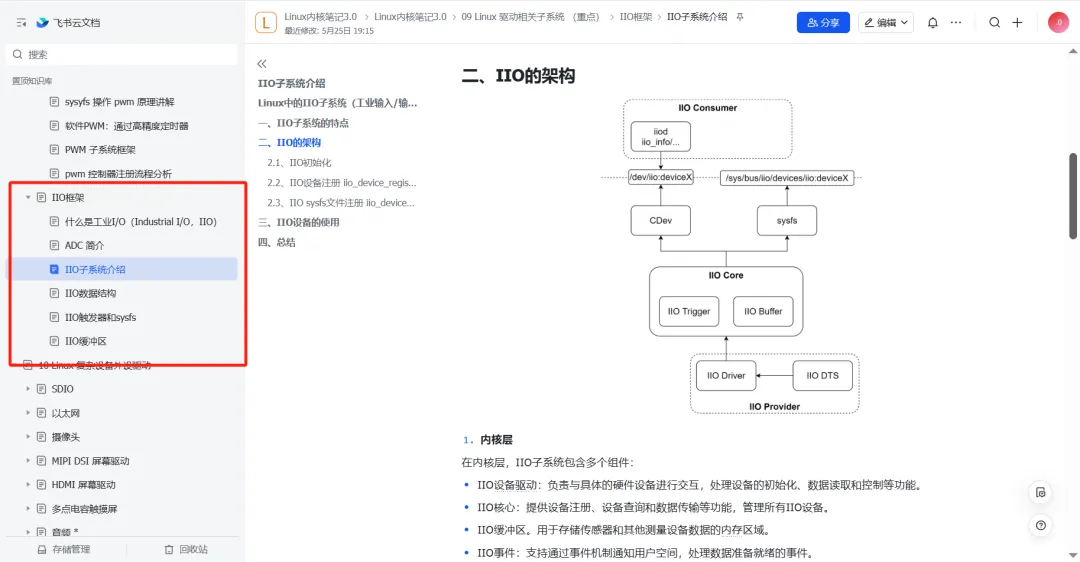
11 PWM/IIO
核心解析:两个专项子系统,适配不同场景需求:
- PWM子系统:控制脉冲宽度调制信号,用于调节亮度、速度、位置等,需注册pwm_chip结构体并提供操作函数;
- IIO子系统:工业I/O子系统,专为ADC、DAC、陀螺仪、光感等传感器设计,提供数据采集、校准、事件上报统一框架。
学习目标:能使用两个子系统的API编写驱动或应用。
关键重要性:PWM是电机控制、电源管理核心;IIO简化传感器驱动开发,提供标准化数据接口。
Iio:
3.3、复杂外设驱动(按方向选学)
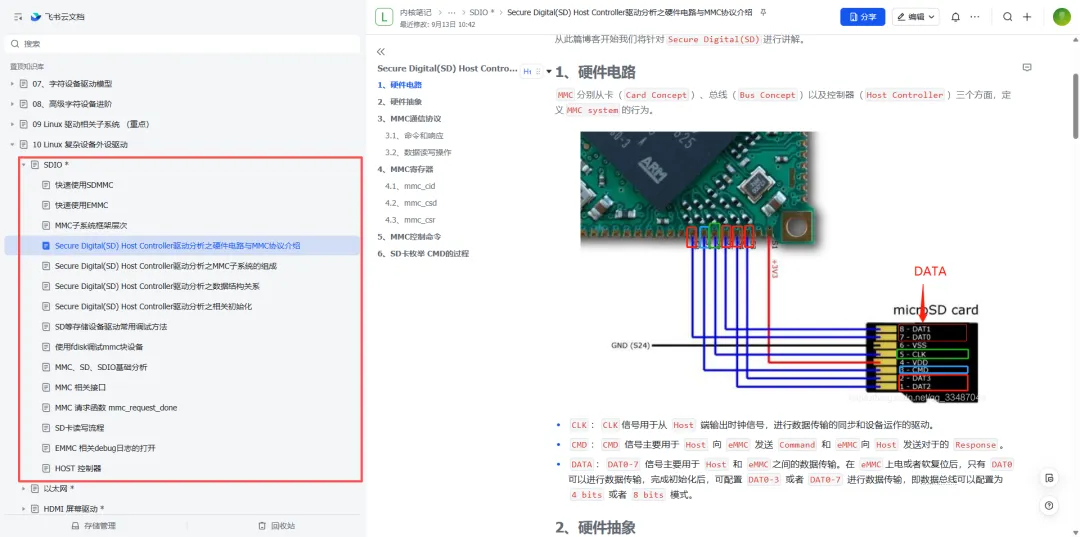
01 SDIO
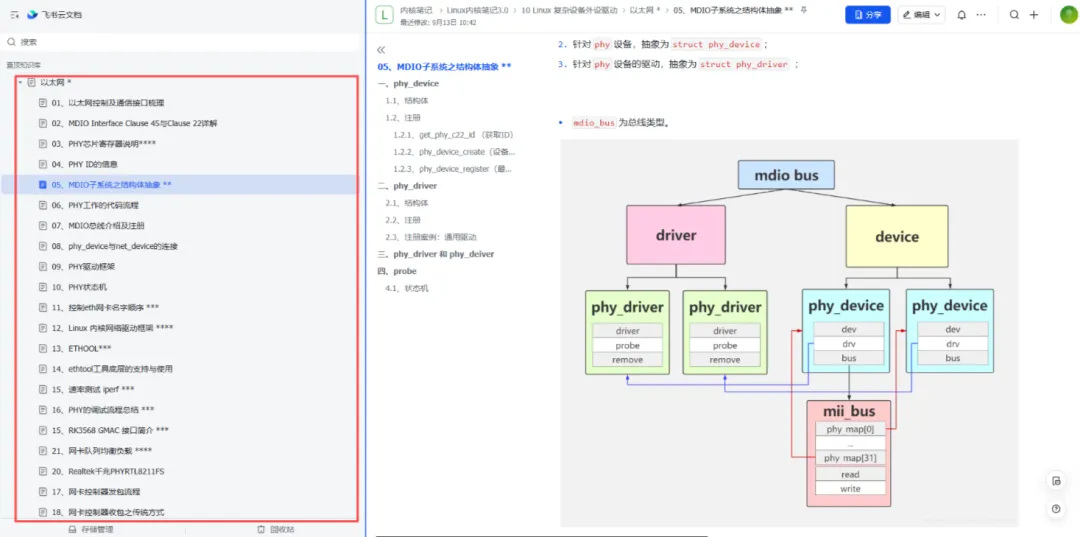
02 以太网
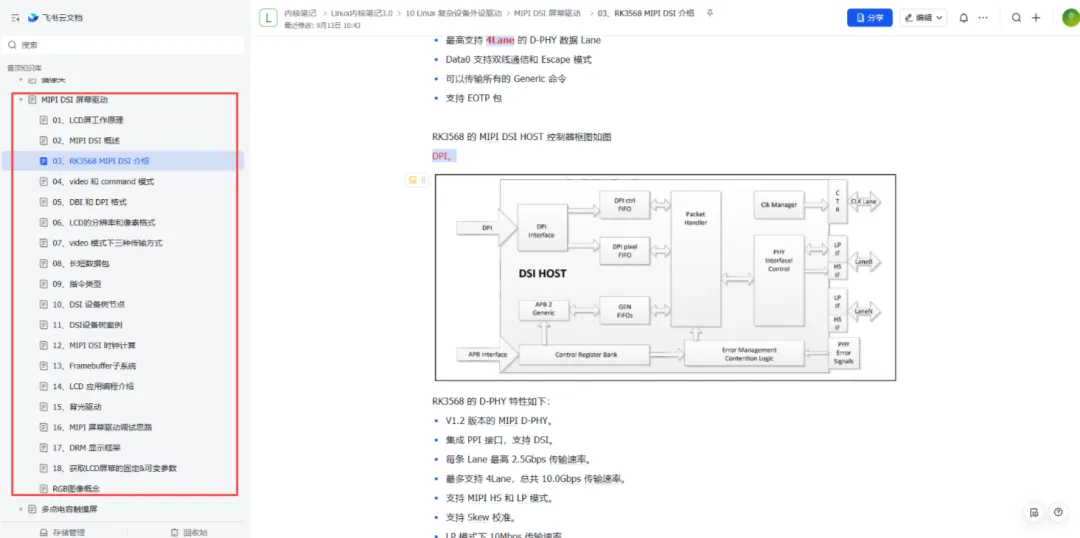
03 MIPI DSI 屏幕驱动
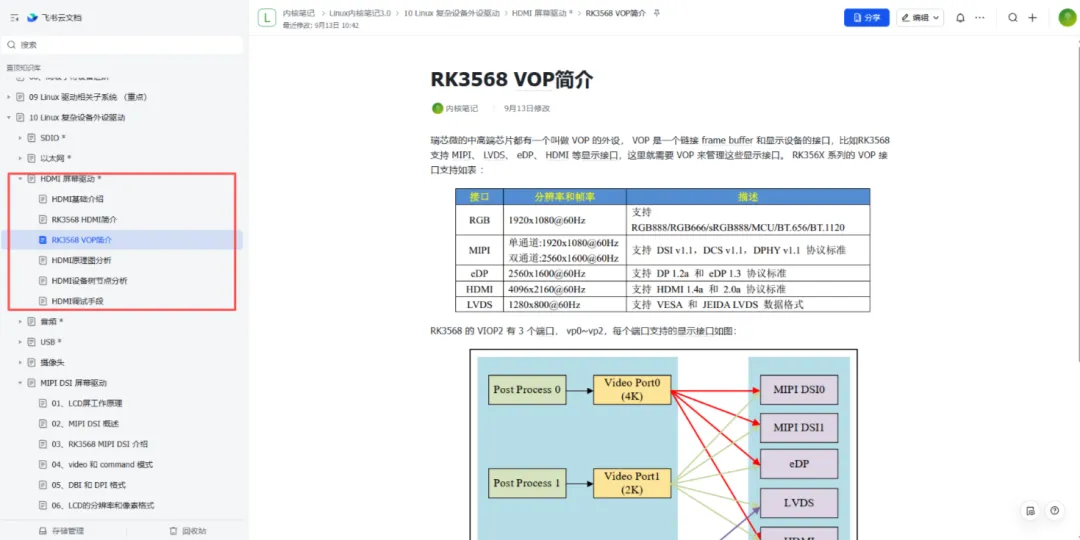
04 HDMI 屏幕驱动
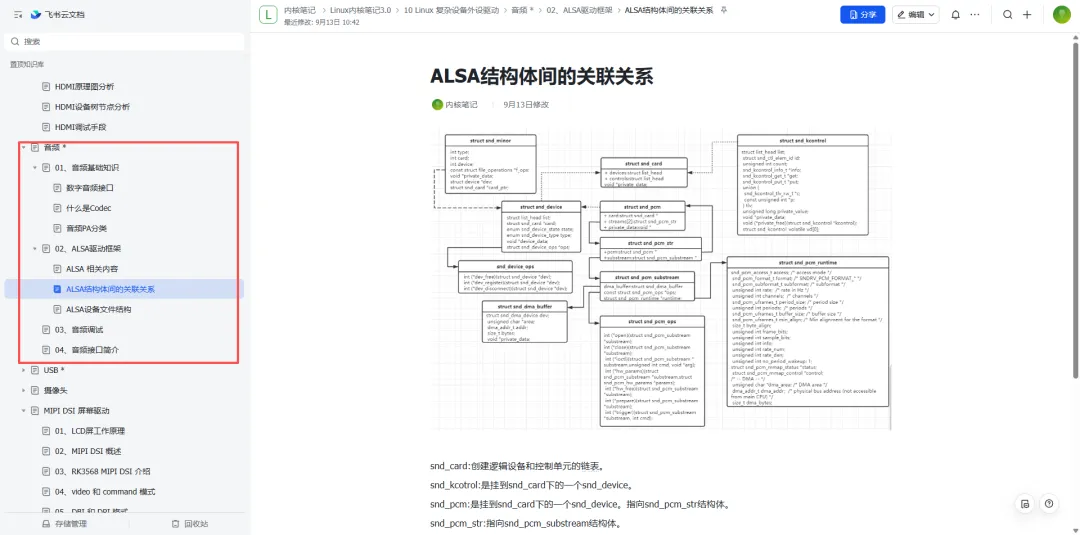
05 音频
06 WIFI
07 USB
详细描述:
重要性:最通用的外设扩展接口,应用极其广泛。
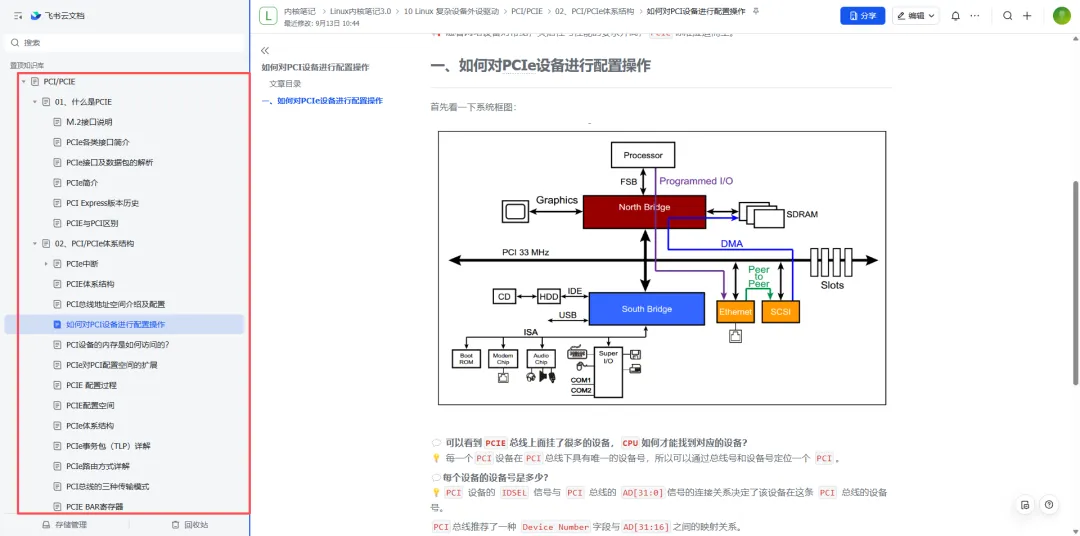
08 PCIE








 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
