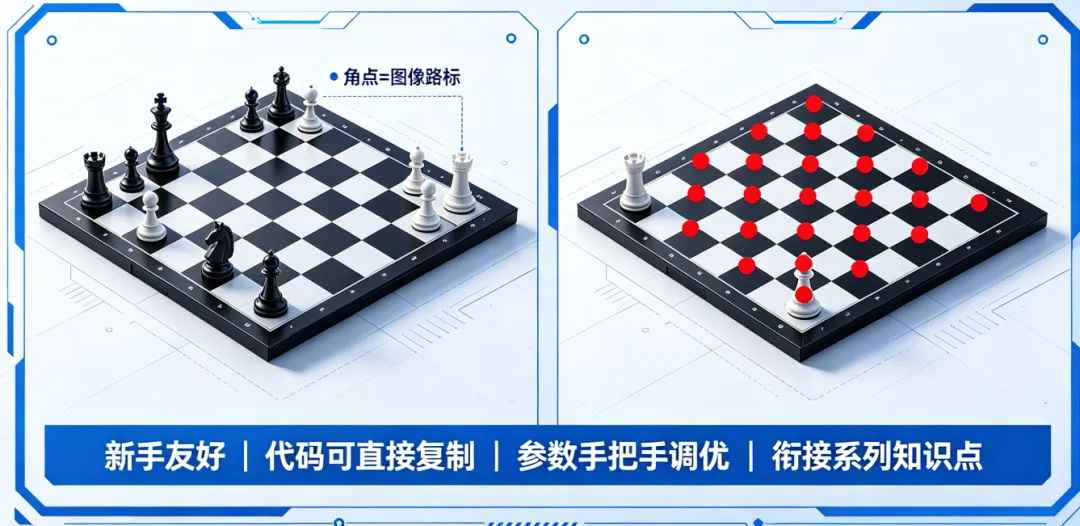
在前几天的分享中,我们吃透了图像特征的核心逻辑,知道边缘、颜色、形状、纹理是计算机“看”世界的关键线索。而今天要讲的哈里斯角检测,正是特征点提取的“入门必修课”——角点作为图像中最具辨识度的特征点,就像图像里的“路标”,是后续图像匹配、全景拼接、目标跟踪、三维重建的核心基础,也是衔接基础特征提取与高级计算机视觉任务的关键一步。
很多新手学习角点检测时,容易陷入“只会调函数,不懂核心逻辑”的误区:比如知道用cv2.cornerHarris()函数能检测角点,却不知道角点是什么、算法为什么能检测到角点,更不知道如何调整参数适配不同场景。今天这篇实操教程,就带大家彻底吃透哈里斯角检测——从通俗定义、核心原理,到实操代码、参数调优、避坑指南,全程避开晦涩理论,结合前文所学的梯度、边缘知识,让新手既能快速上手实操,也能理解背后的逻辑,夯实特征提取的基础。
一、前置基础:先搞懂——什么是角点?(通俗解读)
在开始哈里斯角检测之前,我们先搞懂最基础的问题:什么是角点?用一句话就能讲透:角点是图像中灰度值变化剧烈的点,也是两个或多个边缘的交点,就像我们生活中的墙角、桌子的拐角——无论从哪个方向观察,它的轮廓都会发生明显变化,这也是角点最核心的特征。
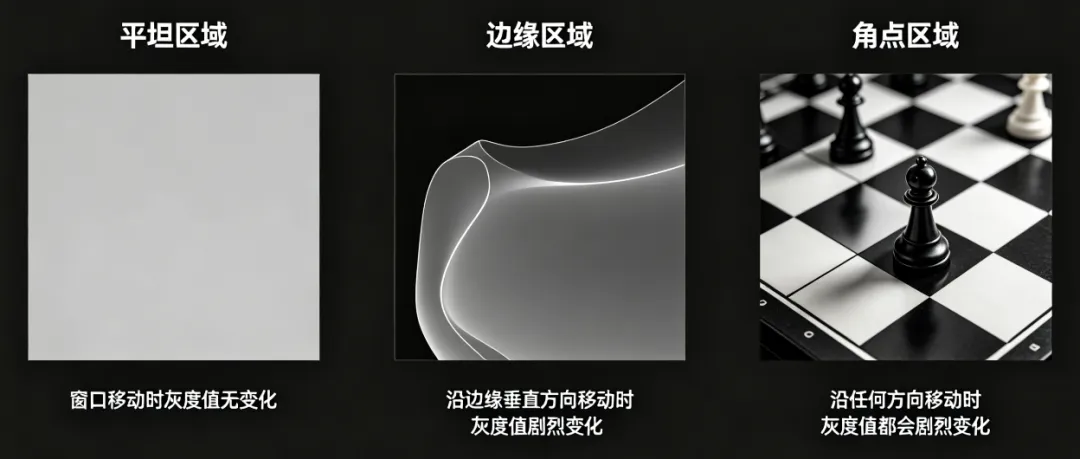
结合三种图像区域的对比,新手能快速区分角点、平坦区域、边缘区域(重点记,后续理解算法原理会用到):
•平坦区域:无论沿哪个方向移动检测窗口,窗口内的灰度值几乎没有变化(比如纯色背景);
•边缘区域:沿边缘平行方向移动窗口,灰度值无明显变化;但沿边缘垂直方向移动,灰度值会剧烈变化(比如物体的轮廓边缘);
•角点区域:沿任何方向移动检测窗口,窗口内的灰度值都会发生剧烈变化——这也是角点与其他区域最本质的区别,也是哈里斯角检测算法的核心判断依据。
举个通俗例子:国际象棋棋盘的黑白格子交点,就是典型的角点——无论我们沿着水平、垂直还是对角线方向移动窗口,窗口内的灰度值(黑→白或白→黑)都会发生剧烈变化;而棋盘的格子内部是平坦区域,格子的边缘则是边缘区域。
关键关联(衔接前文):我们前几篇所学的Sobel算子(梯度计算),是哈里斯角检测的基础——角点的灰度变化剧烈,本质就是梯度值较大,哈里斯算法正是通过计算梯度、构建矩阵,量化这种灰度变化,从而精准识别角点。
二、核心原理:哈里斯角检测算法到底在做什么?(通俗版)
哈里斯角检测算法(1988年由Chris Harris和Mike Stephens提出,是对Moravec角点检测算法的改进),核心逻辑非常简单,不用死记复杂的数学公式,抓住“窗口分析+灰度变化量化”两个核心,就能轻松理解,其本质是通过滑动窗口分析像素区域的灰度变化,利用数学模型判断区域类型。
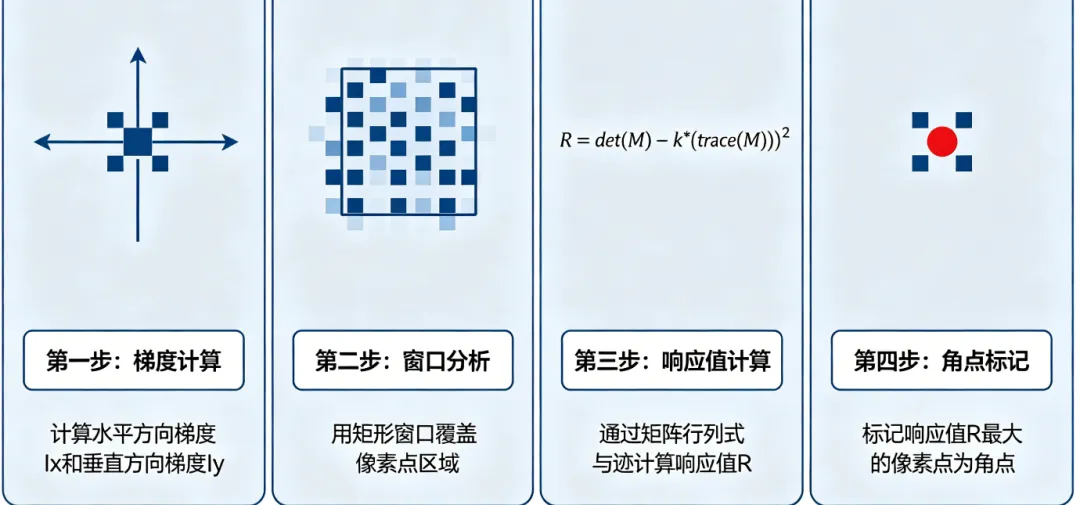
简化后的核心流程(新手必记):
1.梯度计算:对图像的每个像素,用Sobel算子计算水平方向(Ix)和垂直方向(Iy)的梯度(衔接前文Sobel算子知识点),梯度越大,说明灰度变化越剧烈;
2.构建矩阵:对每个像素,以它为中心取一个小窗口(blockSize),计算窗口内梯度的协方差矩阵M,这个矩阵能量化窗口内的灰度变化规律;
3.计算响应值:通过矩阵M的行列式(det(M))和迹(trace(M)),计算哈里斯响应值R,公式为:(k是经验常数,通常取0.04~0.06);
4.角点判断:设定一个阈值,当响应值R大于阈值时,判断该像素为角点(R值越大,角点越明显);同时通过非极大值抑制,过滤掉相邻的冗余角点,保留唯一的峰值响应点。
关键补充(新手不用深究公式,记结论即可):
•当R为较大正值时,该像素是角点(灰度变化剧烈,符合角点特征);
•当R为负值时,该像素是边缘(仅单一方向灰度变化剧烈);
•当R接近0时,该像素是平坦区域(灰度变化不明显)。
哈里斯角检测的核心优势的是具有旋转不变性,角点检测结果不受图像旋转影响,且计算高效、鲁棒性强,对光照变化、轻微噪声有一定容忍度,这也是它被广泛应用的核心原因,但它对尺度变化较为敏感,不同尺寸的角点检测效果差异较大,这是其主要局限。
三、环境准备与核心函数(必记,适配实操)
1. 环境准备(与前文保持一致,降低新手学习成本)
所有操作均基于OpenCV-Python,若未配置环境,执行以下命令一键安装/升级,适配Python 3.7-3.12,Windows/Mac/Linux全兼容:
python# 安装/升级OpenCV-Python(核心依赖)pip install opencv-python -U# 安装辅助库(图像显示、数据处理)pip install numpy matplotlib |
2. 核心函数:cv2.cornerHarris()(必记参数)
OpenCV已将哈里斯角检测的核心逻辑封装成cv2.cornerHarris()函数,新手只需掌握参数含义,就能快速调用,函数原型及核心参数如下(结合官方文档优化,精准适配Python实操):
pythoncv2.cornerHarris(src, blockSize, ksize, k, dst=None, borderType=cv2.BORDER_DEFAULT) |
核心参数详解(新手重点记前4个,后2个默认即可):
•src:输入图像,必须是单通道灰度图(8位或浮点型),不能是彩色图——这是新手最容易踩的坑;
•blockSize:检测窗口的大小(邻域大小),即计算协方差矩阵M时的窗口尺寸,常用值2~10,值越大,检测到的角点越少但更稳定;
•ksize:Sobel算子的孔径大小(卷积核大小),必须是奇数,常用值3(默认),若图像噪声大,可增大至5;
•k:哈里斯响应函数中的经验常数,取值范围0.04~0.06,默认0.04,k值越小,检测到的角点越多(可能出现误检),k值越大,角点越少但越精准;
•dst:输出图像,存储角点检测的响应值,与输入图像大小一致,类型为CV_32FC1(无需手动设置,函数自动生成);
•borderType:边界填充类型,默认cv2.BORDER_DEFAULT,无需手动调整。
补充函数:cv2.goodFeaturesToTrack(),可结合哈里斯角检测使用,用于筛选出最优质的角点,去除冗余和误检的角点,后续实操会详细讲解其用法,该函数可通过设置useHarrisDetector参数启用哈里斯检测逻辑。
四、核心实操:哈里斯角检测完整流程(代码可直接复制)
结合前文的梯度计算、图像预处理知识点,我们以“国际象棋棋盘”(经典角点测试图)为例,实现哈里斯角检测的完整流程,代码附详细解读,新手可直接复制运行,替换自己的图像即可。
1. 基础实操:哈里斯角检测入门(核心流程)
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 读取图像并预处理(灰度化+降噪,衔接前文预处理知识点)# 读取彩色图像,转为灰度图(必须是单通道灰度图)img = cv2.imread("chessboard.jpg") # 替换为自己的图像路径gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 高斯平滑降噪(减少噪声对梯度计算的干扰,提升检测精度)gray_blur = cv2.GaussianBlur(gray, (3, 3), sigmaX=1)# 转换为浮点型(cv2.cornerHarris()要求输入可为浮点型)gray_float = np.float32(gray_blur)# 2. 执行哈里斯角检测(核心步骤)blockSize = 2 # 检测窗口大小,常用2~3ksize = 3 # Sobel卷积核大小,必须为奇数,默认3k = 0.04 # 经验常数,默认0.04dst = cv2.cornerHarris(gray_float, blockSize, ksize, k)# 3. 后处理:膨胀操作(让角点标记更明显,便于观察)dst = cv2.dilate(dst, None) # 无需设置卷积核,默认即可# 4. 标记角点(设定阈值,筛选出显著角点,红色标记)# 阈值设为响应值最大值的1%(可调整,值越小,角点越多)img[dst > 0.01 * dst.max()] = [0, 0, 255] # BGR格式:红色# 5. 显示效果(原始图 vs 角点检测结果)plt.figure(figsize=(12, 6))# 原始图像plt.subplot(1, 2, 1)plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))plt.title("原始图像(国际象棋棋盘)")plt.axis("off")# 角点检测结果plt.subplot(1, 2, 2)plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))plt.title("哈里斯角检测结果(红色标记角点)")plt.axis("off")plt.tight_layout()plt.show()# 可选:保存检测结果cv2.imwrite("harris_corner_result.jpg", img) |
关键说明:
•预处理必须做灰度化:若直接输入彩色图,函数会报错,这是新手最容易踩的坑;
•高斯平滑不可少:若图像噪声较大,不进行降噪处理,会导致误检(把噪声当成角点);
•阈值调整技巧:0.01*dst.max()中的0.01可调整,范围0.01~0.05,值越小,检测到的角点越多,值越大,角点越稀疏(仅保留最显著的角点)。
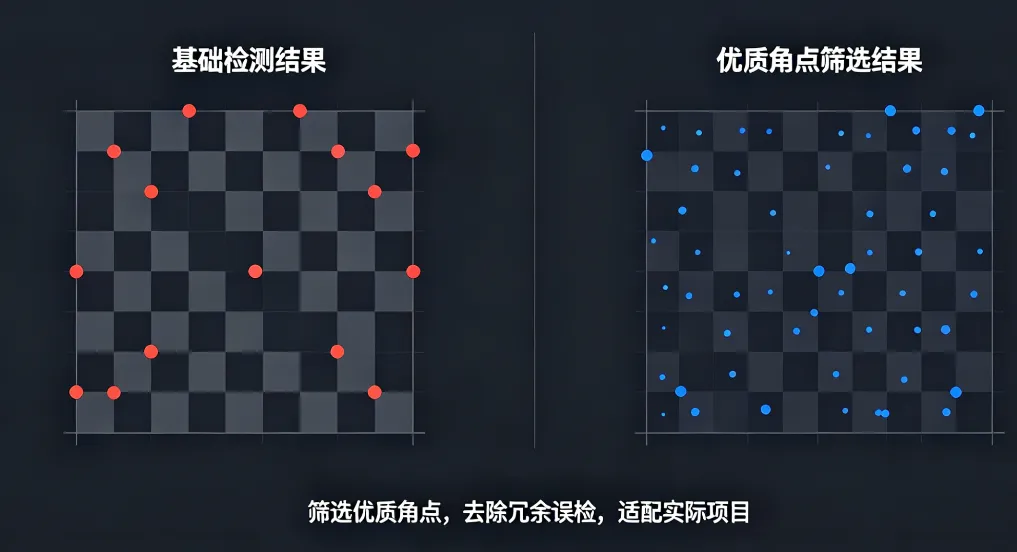
2. 进阶实操:筛选优质角点(cv2.goodFeaturesToTrack())
基础实操中,可能会检测到一些冗余、微弱的角点,此时可使用cv2.goodFeaturesToTrack()函数,结合哈里斯角检测,筛选出最优质的角点,去除误检和冗余,适配更精准的场景(如图像匹配),代码如下:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 读取图像并预处理img = cv2.imread("chessboard.jpg")gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray_blur = cv2.GaussianBlur(gray, (3, 3), sigmaX=1)# 2. 使用cv2.goodFeaturesToTrack()筛选优质角点(启用哈里斯检测)maxCorners = 50 # 最多保留50个优质角点(可调整)qualityLevel = 0.01 # 角点质量阈值(0~1,值越大,角点质量要求越高)minDistance = 10 # 两个角点之间的最小距离(避免相邻冗余角点)# 启用哈里斯角检测,useHarrisDetector=Truecorners = cv2.goodFeaturesToTrack(image=gray_blur,maxCorners=maxCorners,qualityLevel=qualityLevel,minDistance=minDistance,useHarrisDetector=True, # 关键:启用哈里斯角检测k=0.04 # 哈里斯检测的k值,与cv2.cornerHarris()一致)# 3. 标记优质角点(蓝色圆点,比基础实操更精准)corners = np.int0(corners) # 转换为整数坐标(便于绘制)for corner in corners:x, y = corner.ravel() # 提取角点坐标cv2.circle(img, (x, y), 3, (255, 0, 0), -1) # 绘制蓝色实心圆(半径3,厚度-1)# 4. 显示效果(优质角点筛选结果)plt.figure(figsize=(8, 8))plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))plt.title("优质角点筛选结果(蓝色标记,无冗余)")plt.axis("off")plt.show()# 可选:保存结果cv2.imwrite("good_harris_corners.jpg", img) |
核心优势:cv2.goodFeaturesToTrack()函数会自动过滤掉响应值低、相邻过近的角点,保留最优质的角点,相比基础实操,更适合后续的图像匹配、目标跟踪等场景,也是实际项目中常用的组合方式。
3. 实战拓展:不同场景的参数调优(新手必看)
哈里斯角检测的参数(blockSize、ksize、k、阈值),需要根据不同图像场景调整,才能达到最佳效果,以下是3种常见场景的调优方案,新手可直接参考:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 读取不同场景的测试图img1 = cv2.imread("chessboard.jpg") # 场景1:棋盘(角点密集、清晰)img2 = cv2.imread("building.jpg") # 场景2:建筑图像(角点为墙体转角、窗户边角)img3 = cv2.imread("natural.jpg") # 场景3:自然场景(角点为树枝分叉,噪声较多)# 定义调优后的参数(分场景)scenes = [(img1, "棋盘场景", 2, 3, 0.04, 0.01), # (图像, 场景名称, blockSize, ksize, k, 阈值系数)(img2, "建筑场景", 3, 3, 0.05, 0.02),(img3, "自然场景", 5, 5, 0.06, 0.03)]# 批量处理不同场景plt.figure(figsize=(15, 5))for i, (img, name, blockSize, ksize, k, thresh_coeff) in enumerate(scenes):gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray_blur = cv2.GaussianBlur(gray, (3, 3), sigmaX=1)gray_float = np.float32(gray_blur)# 执行哈里斯角检测dst = cv2.cornerHarris(gray_float, blockSize, ksize, k)dst = cv2.dilate(dst, None)img[dst > thresh_coeff * dst.max()] = [0, 0, 255]# 显示效果plt.subplot(1, 3, i+1)plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))plt.title(f"{name}(调优后)")plt.axis("off")plt.tight_layout()plt.show() |
调优规律(新手记牢):
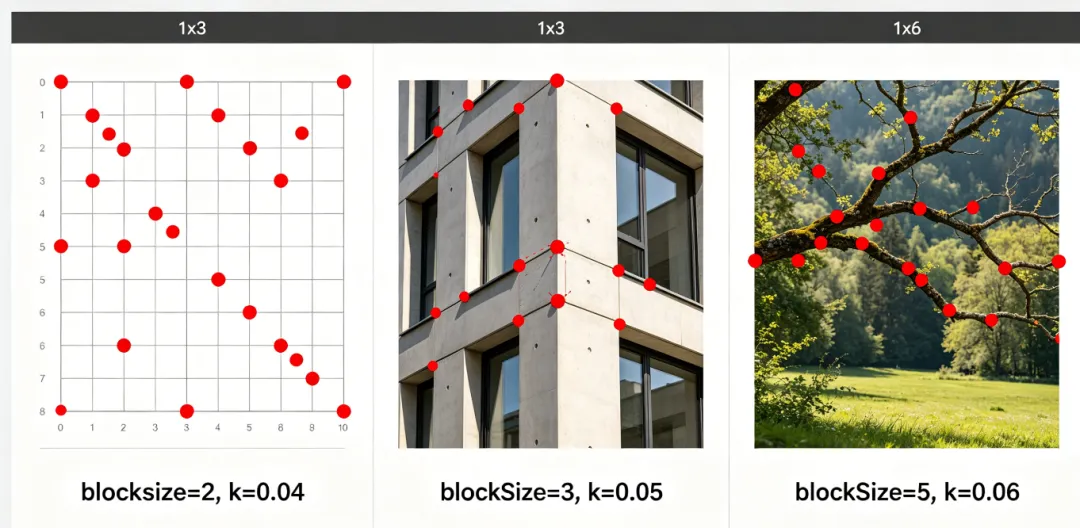
•角点密集、清晰场景(如棋盘):blockSize=2~3,ksize=3,k=0.04,阈值系数=0.01(保留更多角点);
•角点稀疏、轮廓清晰场景(如建筑):blockSize=3~4,ksize=3,k=0.05,阈值系数=0.02(过滤微弱角点);
•噪声较多、角点模糊场景(如自然场景):blockSize=5~7,ksize=5,k=0.06,阈值系数=0.03(减少误检,保留显著角点),同时可增加高斯平滑的卷积核大小(如(5,5))。
五、新手必避的5个坑(实操避坑指南)
•坑1:输入图像未做灰度化——直接输入彩色图,cv2.cornerHarris()函数会报错,必须先通过cv2.cvtColor()转为单通道灰度图,这是最基础也最容易踩的坑;
•坑2:未进行降噪处理——图像噪声会干扰梯度计算,导致误检(把噪声当成角点),建议先进行高斯平滑(cv2.GaussianBlur()),尤其是自然场景图像;
•坑3:ksize设为偶数——cv2.cornerHarris()的ksize(Sobel算子孔径大小)必须是奇数,否则函数会报错,常用值3、5;
•坑4:k值设置不合理——k值超出0.04~0.06范围,会导致角点过多(k过小)或过少(k过大),新手优先用默认值0.04,再根据场景微调;
•坑5:忽略非极大值抑制——基础实操中未做非极大值抑制,会出现相邻冗余角点,建议使用cv2.goodFeaturesToTrack()函数筛选优质角点,适配实际项目。
六、完整实战代码(一键复制运行,适配所有场景)
整合以上所有实操内容,包含“基础检测+优质角点筛选+分场景调优”,替换自己的图像路径,即可一键跑通,适合新手直接实操,巩固哈里斯角检测的所有知识点,同时衔接前文系列内容:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 环境验证(可选)print("OpenCV版本:", cv2.__version__)# 2. 读取图像(替换为自己的图像路径,可替换为任意场景图像)img_basic = cv2.imread("chessboard.jpg") # 基础实操图像img_good = cv2.imread("chessboard.jpg") # 优质角点筛选图像img_scene1 = cv2.imread("chessboard.jpg") # 场景1:棋盘img_scene2 = cv2.imread("building.jpg") # 场景2:建筑img_scene3 = cv2.imread("natural.jpg") # 场景3:自然if None in [img_basic, img_good, img_scene1, img_scene2, img_scene3]:print("错误:未找到图像,请检查图像路径!")else:# 3. 基础哈里斯角检测gray_basic = cv2.cvtColor(img_basic, cv2.COLOR_BGR2GRAY)gray_basic_blur = cv2.GaussianBlur(gray_basic, (3, 3), sigmaX=1)gray_basic_float = np.float32(gray_basic_blur)dst_basic = cv2.cornerHarris(gray_basic_float, 2, 3, 0.04)dst_basic = cv2.dilate(dst_basic, None)img_basic[dst_basic > 0.01 * dst_basic.max()] = [0, 0, 255]# 4. 优质角点筛选(启用哈里斯检测)gray_good = cv2.cvtColor(img_good, cv2.COLOR_BGR2GRAY)gray_good_blur = cv2.GaussianBlur(gray_good, (3, 3), sigmaX=1)corners = cv2.goodFeaturesToTrack(gray_good_blur, maxCorners=50, qualityLevel=0.01, minDistance=10,useHarrisDetector=True, k=0.04)corners = np.int0(corners)for corner in corners:x, y = corner.ravel()cv2.circle(img_good, (x, y), 3, (255, 0, 0), -1)# 5. 分场景调优检测scenes = [(img_scene1, 2, 3, 0.04, 0.01),(img_scene2, 3, 3, 0.05, 0.02),(img_scene3, 5, 5, 0.06, 0.03)]scene_results = []for img, blockSize, ksize, k, thresh_coeff in scenes:gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray_blur = cv2.GaussianBlur(gray, (3, 3), sigmaX=1)gray_float = np.float32(gray_blur)dst = cv2.cornerHarris(gray_float, blockSize, ksize, k)dst = cv2.dilate(dst, None)img[dst > thresh_coeff * dst.max()] = [0, 0, 255]scene_results.append(img)# 6. 统一显示所有效果plt.figure(figsize=(18, 10))# 第一行:基础检测+优质筛选plt.subplot(2, 4, 1)plt.imshow(cv2.cvtColor(img_basic, cv2.COLOR_BGR2RGB))plt.title("基础哈里斯角检测(红色)")plt.axis("off")plt.subplot(2, 4, 2)plt.imshow(cv2.cvtColor(img_good, cv2.COLOR_BGR2RGB))plt.title("优质角点筛选(蓝色)")plt.axis("off")# 第二行:分场景调优plt.subplot(2, 4, 5)plt.imshow(cv2.cvtColor(scene_results[0], cv2.COLOR_BGR2RGB))plt.title("场景1:棋盘(blockSize=2, k=0.04)")plt.axis("off")plt.subplot(2, 4, 6)plt.imshow(cv2.cvtColor(scene_results[1], cv2.COLOR_BGR2RGB))plt.title("场景2:建筑(blockSize=3, k=0.05)")plt.axis("off")plt.subplot(2, 4, 7)plt.imshow(cv2.cvtColor(scene_results[2], cv2.COLOR_BGR2RGB))plt.title("场景3:自然(blockSize=5, k=0.06)")plt.axis("off")plt.tight_layout()plt.show()# 7. 保存结果(可选)cv2.imwrite("basic_harris_result.jpg", img_basic)cv2.imwrite("good_harris_result.jpg", img_good)cv2.imwrite("scene1_harris.jpg", scene_results[0])cv2.imwrite("scene2_harris.jpg", scene_results[1])cv2.imwrite("scene3_harris.jpg", scene_results[2]) |
最后总结(衔接系列,强化记忆)
从图像特征、边缘检测,到今天的哈里斯角检测,我们逐步解锁了特征点提取的核心技巧——角点作为图像中最具辨识度的“路标”,是后续图像匹配、全景拼接、目标跟踪、三维重建的基础,而哈里斯角检测作为最经典、最基础的角点检测算法,是新手入门特征点提取的必经之路。
哈里斯角检测的优势是计算高效、具有旋转不变性,对光照变化和轻微噪声有一定鲁棒性,但它也存在尺度敏感的局限;后续我们将学习更先进的角点检测算法(如SIFT、SURF、ORB),它们在尺度不变性、匹配精度上更有优势,但哈里斯角检测的核心逻辑,是理解这些高级算法的基础。
衔接前文知识点:哈里斯角检测依赖梯度计算(Sobel算子)和图像预处理(高斯平滑),这也再次印证了“预处理是所有图像处理任务的前提”——只有做好预处理,才能提升检测精度,减少误检和漏检。
辛苦大家看到这里啦,如果你觉得这篇OpenCV实操教程对你有帮助,麻烦动动小手,点赞+在看,让更多学习计算机视觉、OpenCV的小伙伴看到,一起交流学习、共同进步~
关注【AI与计算机视觉】,后台回复「哈里斯角检测」,即可免费获取本文完整代码、测试素材(含棋盘、建筑、自然场景测试图),还有更多OpenCV实战教程,助力大家快速上手,吃透角点检测全流程!
评论区留言「角点实操」,我们一起打卡练习,互相交流遇到的问题,深耕计算机视觉,解锁更多实战技巧!后续我们将讲解SIFT特征检测算法,衔接今天的角点检测内容,记得持续关注哦~