第一章 Linux I/O 模型与 epoll 诞生背景
1.1 为什么 select/poll 无法支撑高并发
Linux 最早的 I/O 多路复用模型是 select。select 本质上通过 bitmap 描述 fd 集合,然后内核轮询所有 fd 是否可读。其最大问题是每次调用都需要用户态与内核态之间完整拷贝 fd_set,同时内核还要线性扫描所有文件描述符。
poll 虽然取消了 select 的 fd 数量限制,但底层仍然是 O(n) 遍历模型。对于嵌入式设备而言,几十个 fd 问题并不明显,但在网络服务器、串口网关、工业 CAN 集中器等场景中,上千个连接会导致 CPU 大量浪费在线性扫描上。真正的问题并不是“有没有事件”,而是“为了找事件付出的遍历成本”。
1.2 epoll 的核心设计思想
epoll 的核心思想是“事件驱动”而非“主动轮询”。select/poll 每次调用都遍历 fd,而 epoll 在注册阶段建立监听关系,只有事件真正发生时才将 fd 放入 ready 队列,其本质结构包含两部分:
interest list 保存所有监听 fd,ready list 保存已经就绪的 fd。用户调用 epoll_wait 时,内核无需扫描全部 fd,只需要读取 ready list 即可,因此复杂度接近 O(1)。这种设计本质上是“回调通知模型”,而不是“轮询检测模型”。
第二章 epoll 内核架构解析
2.1 eventpoll 核心数据结构
epoll 在内核中的核心对象是:struct eventpoll,其中包含:
struct rb_root rbr;struct list_head rdllist;wait_queue_head_t wq;
rbr 红黑树用于管理 interest list,即所有监听 fd;rdllist 是 ready list,用于保存已经触发事件的 fd;wq 则用于 epoll_wait 睡眠唤醒。
epoll_ctl 添加 fd 时,内核会创建 epitem 节点并插入红黑树。之所以使用红黑树,是因为 epoll 需要支持高效增删查操作。相比链表,红黑树能够保证 O(logn) 查找复杂度,在大规模 fd 管理场景中效率更稳定。
2.2 epoll_wait 为什么效率高
epoll 最大优势在于“事件发生时主动回调”。驱动或 socket 在 poll 阶段会注册 wait queue:poll_wait(file, &wait_queue, wait);
当设备数据到达时,驱动调用 wake_up:wake_up_interruptible()
内核随后执行 ep_poll_callback,将 fd 插入 ready list。这样 epoll_wait 无需扫描全部 fd,只需要等待 ready list 非空即可,所以epoll 真正高效的原因并不是“用了红黑树”,而是它建立了“设备 → waitqueue → callback → ready list”这条异步通知链路。ready list 才是 epoll 的性能核心。
第三章 poll_wait 与等待队列机制
3.1 wait queue 本质原理
Linux 驱动异步通知的基础并不是 epoll,而是 wait queue。等待队列本质上是:wait_queue_head_t
其内部维护 task_struct 链表。当进程需要等待资源时,会挂入等待队列并进入 TASK_INTERRUPTIBLE 状态,随后调度器切换到其他进程执行。例如:wait_event_interruptible(wq,condition);如果 condition 不满足,当前线程进入睡眠。驱动后续调用:wake_up_interruptible(&wq);等待线程被重新唤醒。这种机制避免 CPU 空转轮询,因此 Linux 所有异步 I/O 几乎都建立在 wait queue 基础之上。
3.2 poll 接口如何接入等待队列
字符设备若想支持 select/poll/epoll,必须实现:.poll = xxx_poll
unsigned intxxx_poll(structfile *file, poll_table *wait){ poll_wait(file, &dev->wq, wait); if(data_ready) return POLLIN; return 0;}
poll_wait 并不会真正睡眠,它只是将当前进程注册进等待队列。真正睡眠发生在 epoll_wait/select/poll 主循环中。很多开发者误以为 poll_wait 会阻塞线程,这是对 Linux poll 机制最常见的误解之一。
第四章 驱动事件通知机制
4.1 驱动如何通知用户空间
Linux 驱动事件通知通常有三种方式:
阻塞 readpoll/epollfasync/SIGIO
其中 poll/epoll 是现代 Linux 最主流方案。驱动内部一般维护 ring buffer,当硬件 IRQ 到达后写入数据,然后调用:wake_up_interruptible()用户态 epoll_wait 被唤醒后执行 read 读取数据。整个过程本质上属于“生产者-消费者模型”,典型串口驱动流程:
UART IRQ ↓ringbuffer 写入 ↓wake_up_interruptible ↓epoll_wait 返回 ↓read 读取数据
Linux 网络栈、input 子系统、TTY 子系统几乎都使用同样模式。
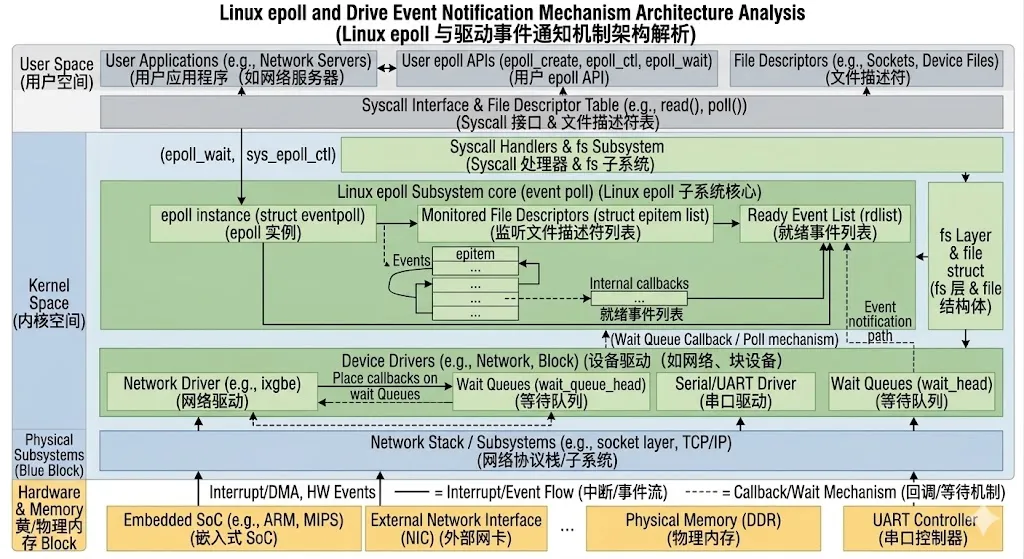
4.2 IRQ 与 epoll 的连接路径
epoll 本身并不感知硬件,它只感知 wait queue。真正建立硬件事件与用户态唤醒关系的是驱动,完整链路如下:
硬件中断 ↓IRQ Handler ↓驱动缓存数据 ↓wake_up_interruptible ↓wait queue 唤醒 ↓ep_poll_callback ↓ready list 插入 fd ↓epoll_wait 返回
因此 epoll 本质上并不是“网络专属机制”,它只是 Linux 通用事件分发框架。任何支持 poll 的字符设备都能够接入 epoll,包括 UART、CAN、GPIO、I2C、input、TTY 等。
第五章 边缘触发与水平触发
5.1 LT 水平触发机制
epoll 默认采用 LT(Level Trigger) 模式,其特点是:
只要 fd 仍然可读epoll_wait 就持续返回
例如 socket 缓冲区存在未读取数据,即使应用未处理完,下一次 epoll_wait 仍然会立即返回。LT 模式本质上更接近传统 poll,编程难度低,不容易遗漏事件,但 LT 存在一个问题:如果大量 fd 长时间处于可读状态,epoll_wait 会频繁返回,导致用户态不断重复处理相同 fd。因此高性能服务器往往不使用 LT。
5.2 ET 边缘触发机制
ET(Edge Trigger) 模式只在状态变化时通知一次:不可读 → 可读,如果用户没有一次性读空缓冲区,后续 epoll_wait 不会再次通知。因此 ET 模式必须结合非阻塞 I/O:while(read(fd, buf, size) > 0)直到返回 EAGAIN。
ET 的优势是减少重复唤醒,尤其适合高并发网络场景。但 ET 对驱动 buffer 设计要求更高,如果驱动没有正确实现 poll 状态判断,很容易导致事件丢失。
第六章 驱动中的 ringbuffer 与异步架构
6.1 为什么驱动必须使用 ringbuffer
现代 Linux 驱动几乎都会引入 ringbuffer。因为 IRQ 上下文不能长时间处理数据,更不能阻塞等待用户空间读取,典型架构:
IRQ 负责快速搬运数据进入环形缓冲区,然后立即退出中断。用户态通过 epoll 被唤醒后再慢慢读取数据。这样能够显著降低 IRQ 延迟,例如串口驱动:
head 由 IRQ 更新,tail 由用户 read 更新。这实际上是 Linux 中最经典的 lock-free 单生产者单消费者模型。
6.2 epoll 与 ringbuffer 的配合
驱动 poll 函数通常通过 ringbuffer 状态判断是否可读:
if(head != tail) return POLLIN;
如果 buffer 非空,则 epoll_wait 立即返回。否则 poll_wait 将进程挂入等待队列,这种机制的关键点在于:
ringbuffer 保存数据waitqueue 负责通知epoll 负责事件聚合
三者共同组成 Linux 异步 I/O 核心架构。很多工业设备程序实际上并不复杂,其核心只是“IRQ + ringbuffer + epoll”这套标准模型。
第七章 epoll 在嵌入式驱动中的实践
7.1 工业设备中的 epoll 架构
在工业 Linux 系统中,一个线程往往同时监听:
UARTCANTCPGPIOeventfdtimerfd
如果采用阻塞 read,每个设备都需要独立线程;如果采用 select,则 fd 数量增加后 CPU 消耗迅速升高。因此 epoll 几乎已经成为工业 Linux 多设备事件管理标准方案,例如 CAN 网关程序:
全部注册进入 epoll。这样单线程即可完成整个事件调度系统。这也是 Linux Reactor 模型的基础。
7.2 高性能驱动设计要点
高性能 epoll 驱动设计重点主要集中在:
减少 wakeup 次数降低锁竞争避免 buffer copy控制 IRQ 时间
很多低性能驱动的问题并不是 epoll 本身,而是驱动频繁 wake_up。例如每收到 1 字节 UART 数据就唤醒一次用户态,会导致上下文切换风暴。
现代驱动通常采用“批量唤醒”策略。例如 UART FIFO 达到阈值后再 wake_up,或者使用 DMA 累积一帧数据统一通知。Linux epoll 只是事件调度框架,真正决定系统吞吐能力的,仍然是驱动底层数据流设计。
建了一个嵌入式Linux技术群,专门聊难题分析和求职面试,欢迎大家一起加入,共同解决工作中的疑难杂症问题