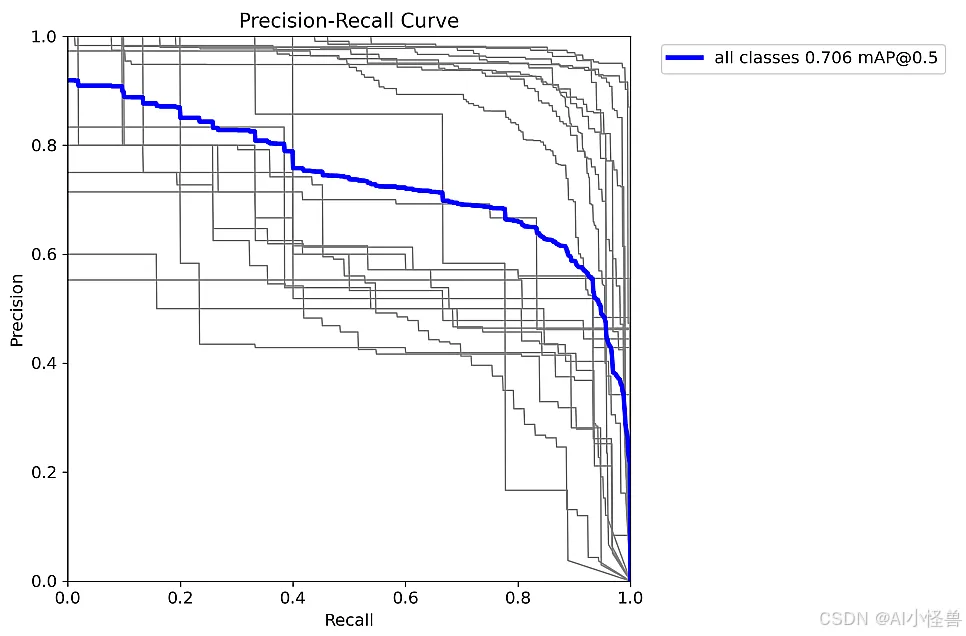
💡💡💡本文摘要:基于YOLOv13的汽车零件分割系统,阐述了整个数据制作和训练可视化过程
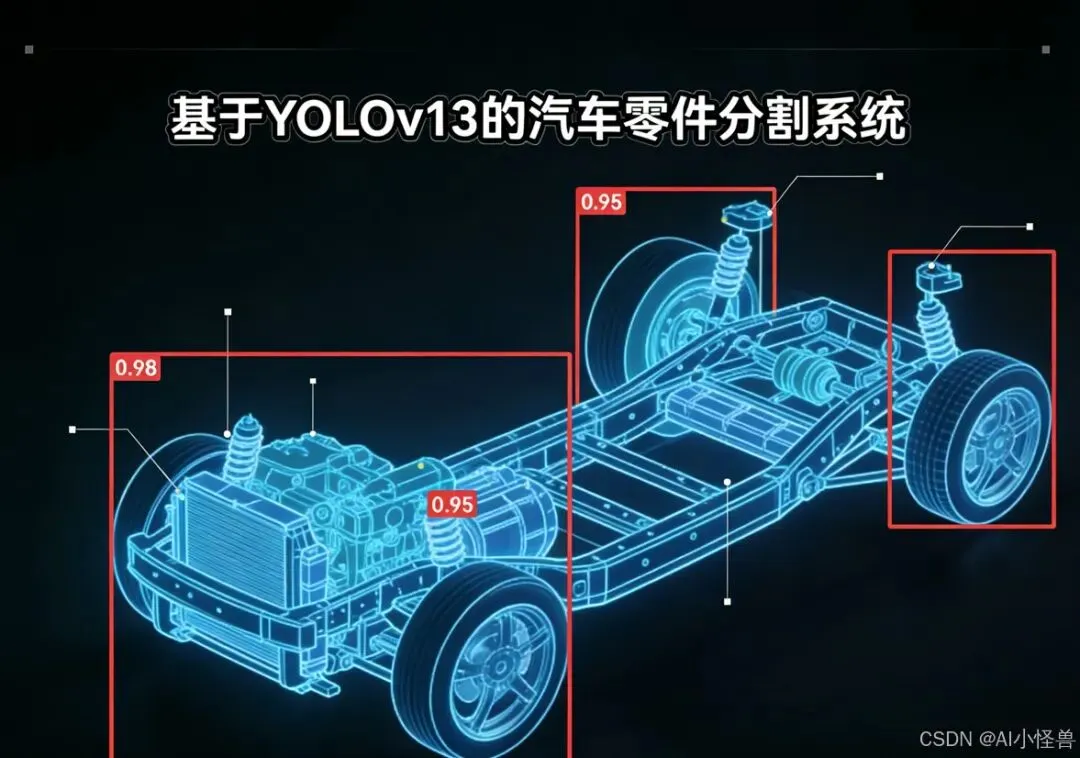
应用场景汽车零件分割技术在多个领域具有广泛应用,包括:
通过准确识别与分类不同车辆部件,汽车零件分割技术优化了相关流程,推动了上述行业的效率提升与自动化进程。
博主简介
AI小怪兽 | 计算机视觉布道者 | 视觉检测领域创新者
深耕计算机视觉与深度学习领域,专注于目标检测前沿技术的探索与突破。长期致力于YOLO系列算法的结构性创新、性能极限优化与工业级落地实践,旨在打通从学术研究到产业应用的最后一公里。
🚀 核心专长与技术创新
🏆 行业影响力与商业实践
💡 未来方向与使命
秉持 “让每一行代码都有温度” 的技术理念,未来将持续聚焦于实时检测、语义分割及工业缺陷检测的商业化闭环等核心方向。愿与业界同仁协同创新,共同推动技术边界,以坚实的技术能力赋能实体经济与行业变革。
原创自研系列, 25年计算机视觉顶会创新点
《YOLOv13魔术师》
《YOLOv12魔术师》
《YOLO11魔术师》
《YOLOv8原创自研》
《YOLOv5原创自研》
《YOLOv7原创自研》
《YOLOv9魔术师》
《YOLOv10魔术师》
应用系列篇:
《YOLO小目标检测》
《深度学习工业缺陷检测》
《YOLOv8-Pose关键点检测》
23、24年最火系列,加入24年改进点内涵100+优化改进篇,涨点小能手,助力科研,好评率极高
《YOLOv8魔术师》
《YOLOv7魔术师》
《YOLOv5/YOLOv7魔术师》
《RT-DETR魔术师》
《YOLOv13魔术师专栏》将从以下各个方向进行创新:
链接:
YOLOv13魔术师订阅链接
【原创自研模块】【多组合点优化】【注意力机制】【卷积魔改】【block&多尺度融合结合】【损失&IOU优化】【上下采样优化 】【小目标性能提升】【前沿论文分享】【训练实战篇】
订阅者通过添加WX: AI_CV_0624,入群沟通,提供改进结构图等一系列定制化服务。
定期向订阅者提供源码工程,配合博客使用。
订阅者可以申请发票,便于报销
💡💡💡为本专栏订阅者提供创新点改进代码,改进网络结构图,方便paper写作!!!
💡💡💡适用场景:红外、小目标检测、工业缺陷检测、医学影像、遥感目标检测、低对比度场景
💡💡💡适用任务:所有改进点适用【检测】、【分割】、【pose】、【分类】等
💡💡💡全网独家首发创新,【自研多个自研模块】,【多创新点组合适合paper 】!!!
☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️ ☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️
包含注意力机制魔改、卷积魔改、检测头创新、损失&IOU优化、block优化&多层特征融合、 轻量级网络设计、25年最新顶会改进思路、原创自研paper级创新等
🚀🚀🚀 本项目持续更新 | 更新完结保底≥80+ ,冲刺100+ 🚀🚀🚀
🍉🍉🍉 联系WX: AI_CV_0624 欢迎交流!🍉🍉🍉
⭐⭐⭐专栏原价299,越早订阅越划算⭐⭐⭐
💡💡💡 2025年计算机视觉顶会创新点适用于YOLOv12、YOLO11、YOLOv10、YOLOv8等各个YOLO系列,专栏文章提供每一步步骤和源码,轻松带你上手魔改网络 !!!
💡💡💡重点:通过本专栏的阅读,后续你也可以设计魔改网络,在网络不同位置(Backbone、head、detect、loss等)进行魔改,实现创新!!!
☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️ ☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️
论文:[2506.17733] YOLOv13: Real-Time Object Detection with Hypergraph-Enhanced Adaptive Visual Perception
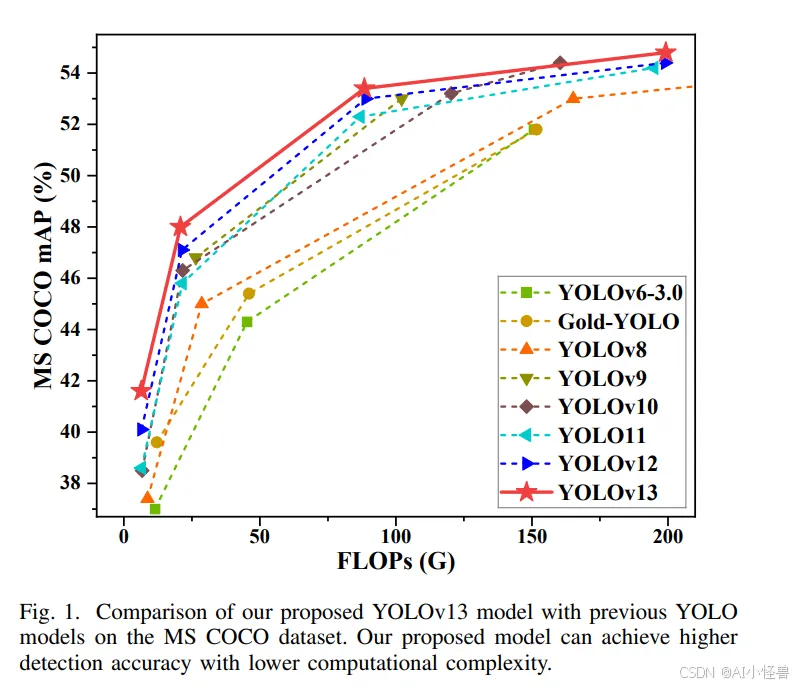
摘要—YOLO 系列模型因其卓越的准确性和计算效率在实时目标检测领域占据主导地位。然而,无论是 YOLO11 及更早版本的卷积架构,还是 YOLOv12 引入的基于区域的自注意力机制,都仅限于局部信息聚合和成对相关性建模,缺乏捕捉全局多对多高阶相关性的能力,这限制了在复杂场景下的检测性能。本文提出了一种准确且轻量化的 YOLOv13 目标检测器。为应对上述挑战,我们提出了一种基于超图的自适应相关性增强(HyperACE)机制,通过超图计算自适应地利用潜在的高阶相关性,克服了以往方法仅基于成对相关性建模的限制,实现了高效的全局跨位置和跨尺度特征融合与增强。随后,我们基于 HyperACE 提出了全链路聚合与分配(FullPAD)范式,通过将相关性增强特征分配到整个网络,有效实现了全网的细粒度信息流和表征协同。最后,我们提出用深度可分离卷积代替常规的大核卷积,并设计了一系列块结构,在不牺牲性能的前提下显著降低了参数量和计算复杂度。我们在广泛使用的 MS COCO 基准测试上进行了大量实验,结果表明,我们的方法在参数更少、浮点运算量更少的情况下达到了最先进性能。具体而言,我们的 YOLOv13-N 相比 YOLO11-N 提升了 3.0% 的 mAP,相比 YOLOv12-N 提升了 1.5% 的 mAP。
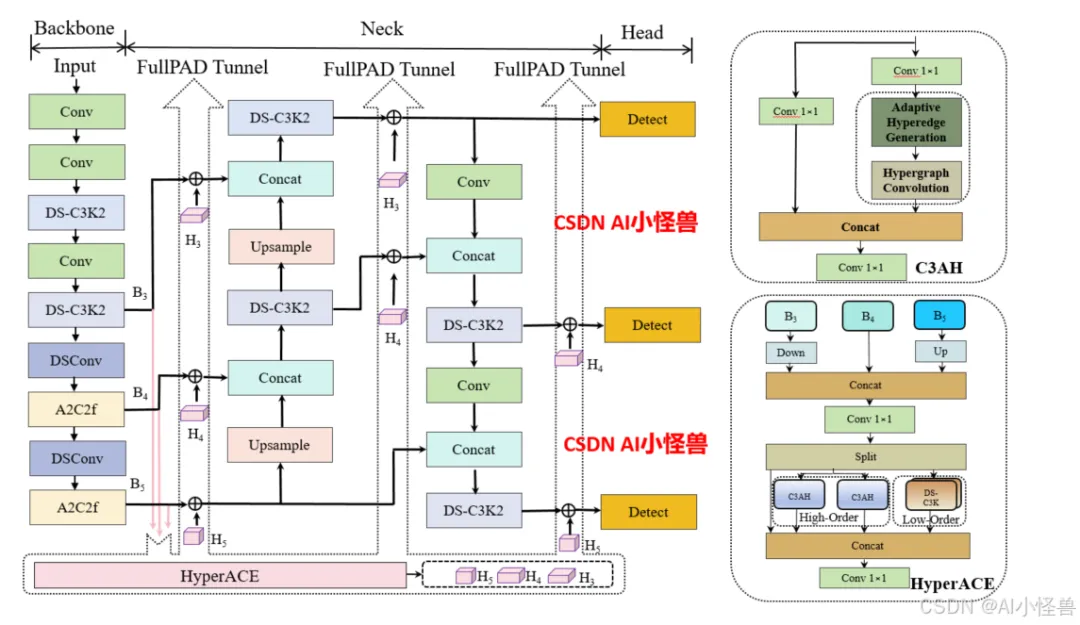
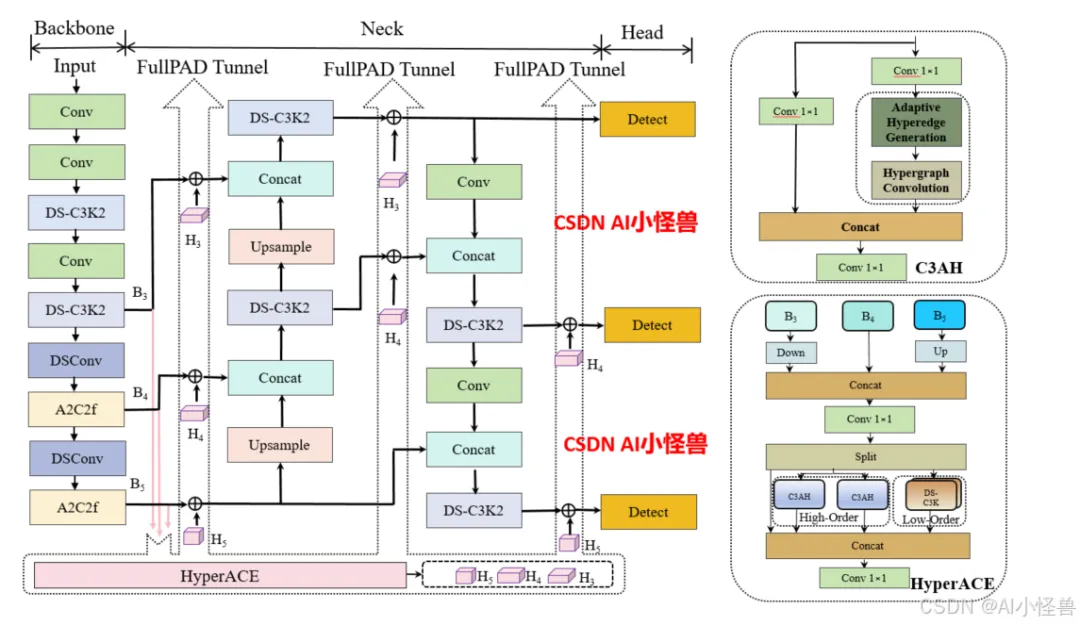
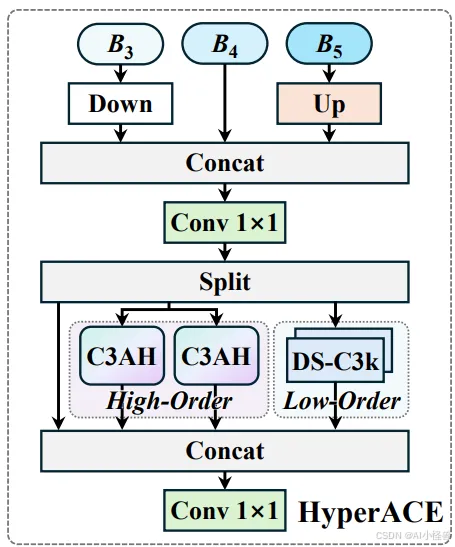
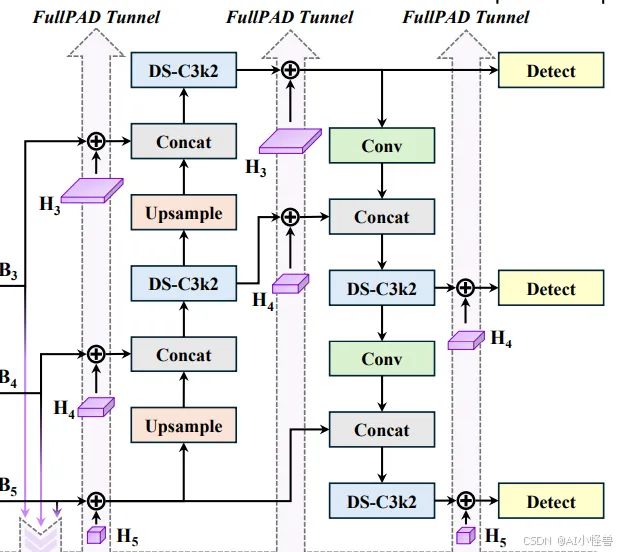
以往的 YOLO 系列遵循 “骨干网络 → 颈部网络 → 检测头” 的计算范式,这本质上限定了信息流的充分传输。相比之下,我们的模型通过超图自适应关联增强(HyperACE)机制,实现全链路特征聚合与分配(FullPAD),从而增强传统的 YOLO 架构。因此,我们提出的方法在整个网络中实现了细粒度的信息流和表征协同,能够改善梯度传播并显著提升检测性能。具体而言,如图 2 所示,我们的 YOLOv13 模型首先使用类似以往工作的骨干网络提取多尺度特征图 B1、B2、B3、B4、B5,但其中的大核卷积被我们提出的轻量化 DS-C3k2 模块取代。然后,与传统 YOLO 方法直接将 B3、B4 和 B5 输入颈部网络不同,我们的方法将这些特征收集并传递到提出的 HyperACE 模块中,实现跨尺度跨位置特征的高阶关联自适应建模和特征增强。随后,我们的 FullPAD 范式利用三个独立通道,将关联增强后的特征分别分配到骨干网络与颈部网络的连接处、颈部网络的内部层以及颈部网络与检测头的连接处,以优化信息流。最后,颈部网络的输出特征图被传递到检测头中,实现多尺度目标检测。
ultralytics/cfg/models/v13/yolov13.yaml
1.1 HyperACE
超图自适应相关性增强机制 HyperACE
代码位置ultralytics/nn/modules/block.py
1.2 FullPAD_Tunnel
全流程聚合 - 分发范式 FullPAD
代码位置ultralytics/nn/modules/block.py
1.3 DSC3k2
基于深度可分离卷积的轻量化模块
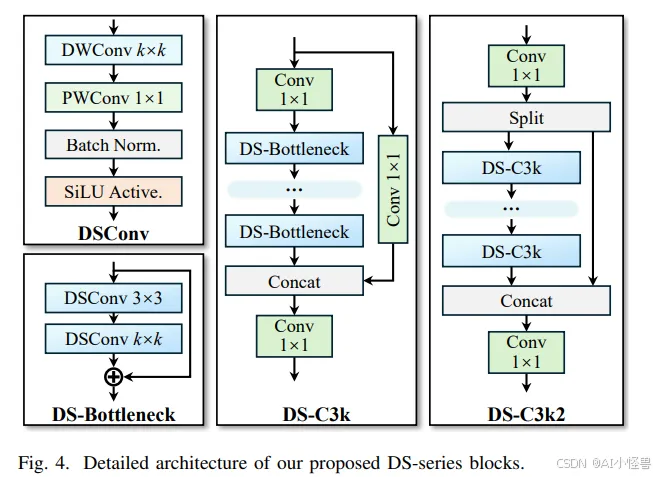
代码位置ultralytics/nn/modules/block.py
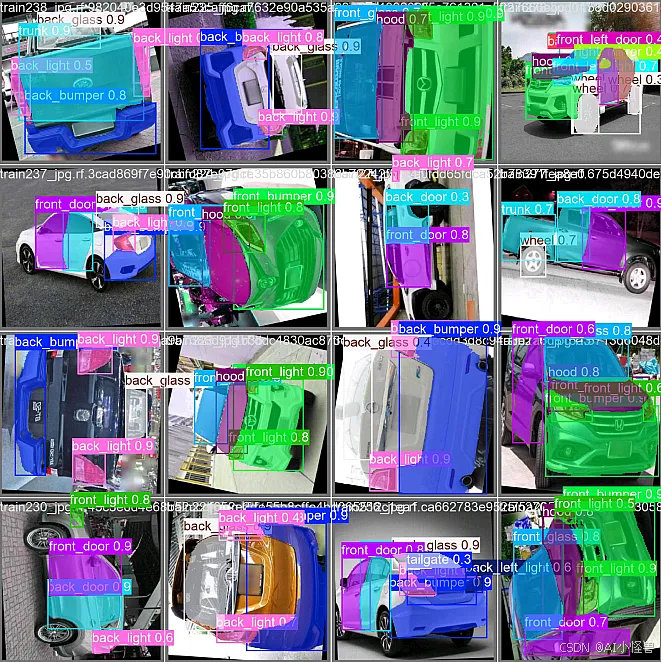
汽车零件分割数据集是一个专门为计算机视觉应用(特别是分割任务)精心整理的图像与视频集合。该数据集提供多视角拍摄的多样化视觉素材,并附带高质量标注,为训练和测试分割模型(如 Ultralytics YOLO)提供了宝贵的样本资源。
无论您是从事汽车研究、开发车辆维护的 AI 解决方案,还是探索计算机视觉应用,汽车零件分割数据集都能帮助您提升项目的准确性与效率。
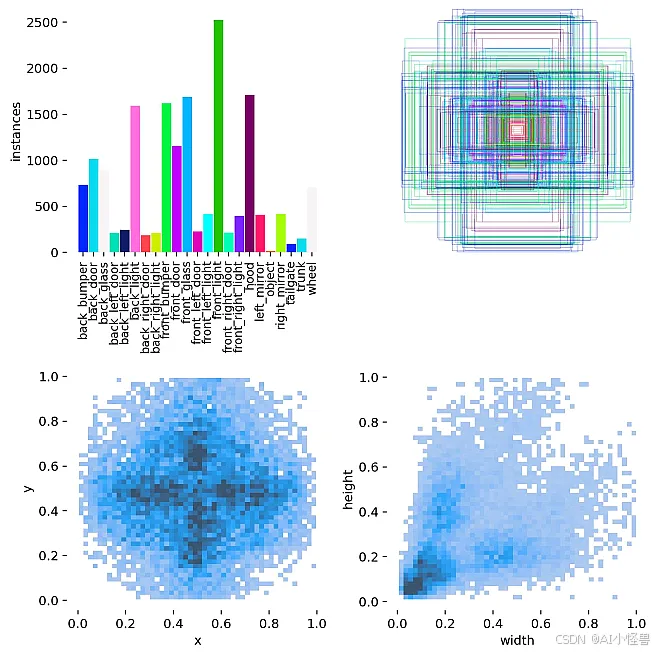
2.1 汽车零件分割数据集介绍
数据集结构汽车零件分割数据集的数据分布如下:
类别23类:

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
