大家好,我是王鸽,接下来的文章主要是对Linux的硬件接口驱动代码解读,今天分享一篇文章Linux驱动的中pinctrl 介绍,直接进入主题,read fuck code!pinctrl
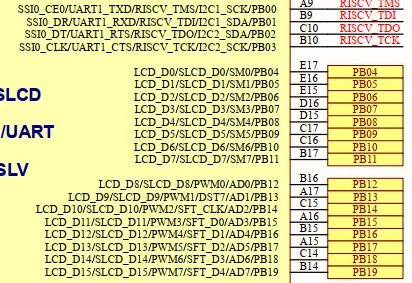
我们知道soc内部包含有多个,通过pin控制器的,我们可以配置一个或者一组引脚的功能和特性。Linux内核为了统一各soc厂商的pin脚管理 提供了pinctrl子系统。pinctrl(Pin Control)子系统的主要职责是管理引脚的(Multiplexing)和电气属性(Configuration)。
管理引脚的复用
芯片的引脚不单单是普通引脚,同一个物理引脚通常可以有多种功能(即复用为不同的功能)。例如,一个引脚可以被配置为:
普通的 GPIOI2C 总线的 SCL 信号线SPI 总线的 MISO 信号线串口的 TX 信号线
pinctrl子系统负责在驱动需要时,将引脚切换到正确的功能模式。
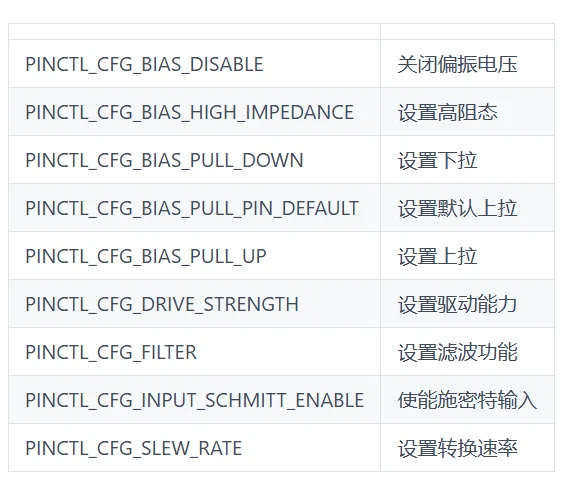
配置电气属性:
在引脚被设置为某种功能后,还可以配置其电气特性,例如:
上拉/下拉电阻:使能、禁止、上拉、下拉。
驱动强度:设置引脚的输出电流能力(如 2mA, 4mA, 8mA, 16mA)。
** slew-rate**:压摆率(转换速率),控制信号边沿的陡峭程度。
偏置:高阻态、总线保持等。
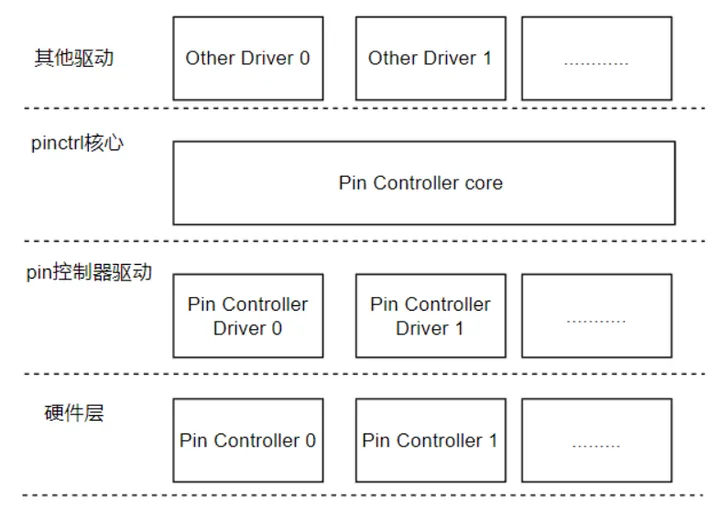
pinctrl子系统结构描述:
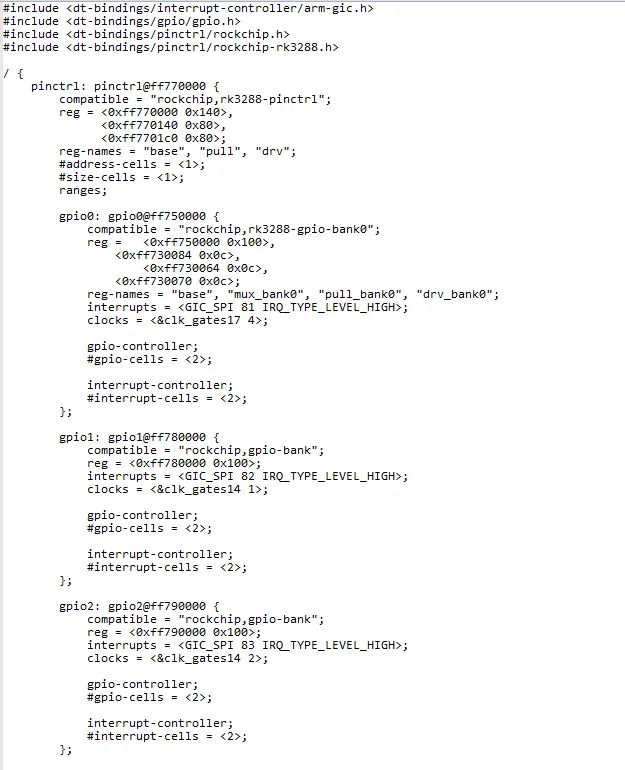
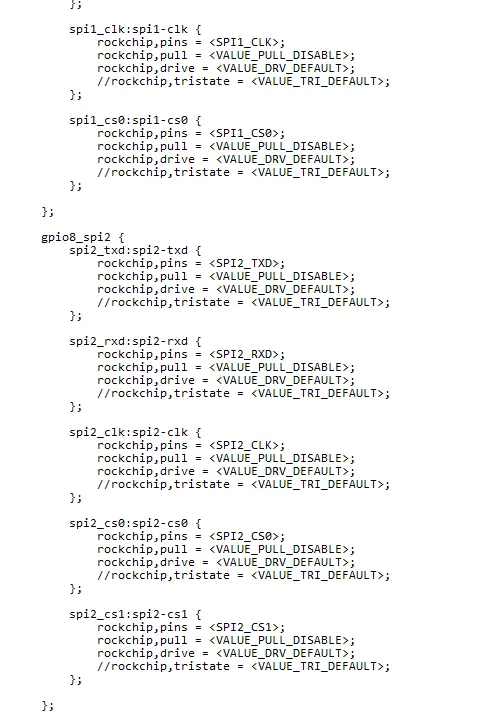
pinctrl核心层是内核抽象出来,向下为个SoC pin controler drvier提供底层通信接口的能力, 向上为其他驱动提供了控制pin的能力,比如pin复用、配置引脚的电气特性,同时也为GPIO子系统提供pin操作。而pin控制器驱动层,主要提供了操作pin的方法。pinctrl子系统的源文件在内核源码/drivers/pinctrl目录下,主要包括核心文件,和其他内核驱动的接口头文件,底层的pin控制器驱动接口,还有其他厂商Pinctrl驱动文件。接下来是具体以rk3288-xxx.dts设备树来举例子:kernel\arch\arm\boot\dts\rk3288-pinctrl.dtsi在设备树中的配置:
还有这块的配置
Pin groups
group,就是如上dts中的spi2_cs0: spi2-cs0,表示一组pins,这组pins统一表示了一种功能,比如,spi需要两个cs, 在定义pins的同时,还会提供对于每个pin的电气特性的配置,如,上下拉电阻、驱动能力等。在内核中用结构体struct group_desc描述。function
function,就是一组引脚功能,如上dts中的spi,表示以当前这个pin所代表的的功能。只有一个group所引用的pin的function有效,否则会引起pin的function冲突 比如,一个pin既可以作为普通的gpio,也可以作为SPI的cs引脚,那么,这个pin只能代表一个function,即,要么作为普通的gpio,作为SPI的cs引脚。pin state
一个设备工作在某个状态,所使用的pin和function是唯一确认的,一个固定的组合确认一个固定的状态,这固定的状态在pinctrl子系统中称为“pin state”, 枚举了当下该设备的可能。在其他设备驱动使用时,pinctrl子系统只需设置相应pin state即可。 在设备树中描述就是使用pinctrl-names指定状态名字,pinctrl-x指定引脚状态。驱动代码
主要的数据结构和接口
内核将pinctrl驱动抽象为pinctrl_desc对象,具体到soc厂商的pinctrl驱动便是该对象一个实例, 在驱动所有的pin信息以及对于pin的控制接口实例化成pinctrl_desc,并将pinctrl_desc注册到内核中,如下:
staticintrockchip_pinctrl_probe(struct platform_device *pdev){ struct rockchip_pinctrl *info; struct device *dev = &pdev->dev; struct rockchip_pin_ctrl *ctrl; struct device_node *np = pdev->dev.of_node, *node; struct resource *res; void __iomem *base;.....
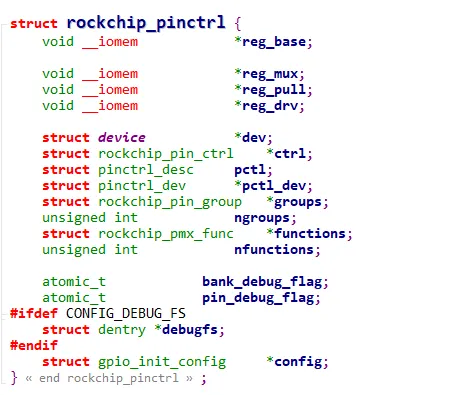
其中struct rockchip_pinctrl 的结构体中包含pinctrl_desc结构体
struct pinctrl_desc {const char *name;struct pinctrl_pin_desc const *pins; //描述一个pin控制器的引脚,unsigned int npins; //描述该控制器有多少个引脚const struct pinctrl_ops *pctlops;//引脚操作函数,有描述引脚,获取引脚等,全局控制函数const struct pinmux_ops *pmxops;//引脚复用相关的操作函数const struct pinconf_ops *confops; //引脚配置相关struct module *owner;};
一般控制器驱动匹配设备,调用probe,最后会调用pinctrl_register函数,向内核注册pinctrl,产生pinctrl_dev,该函数如下:
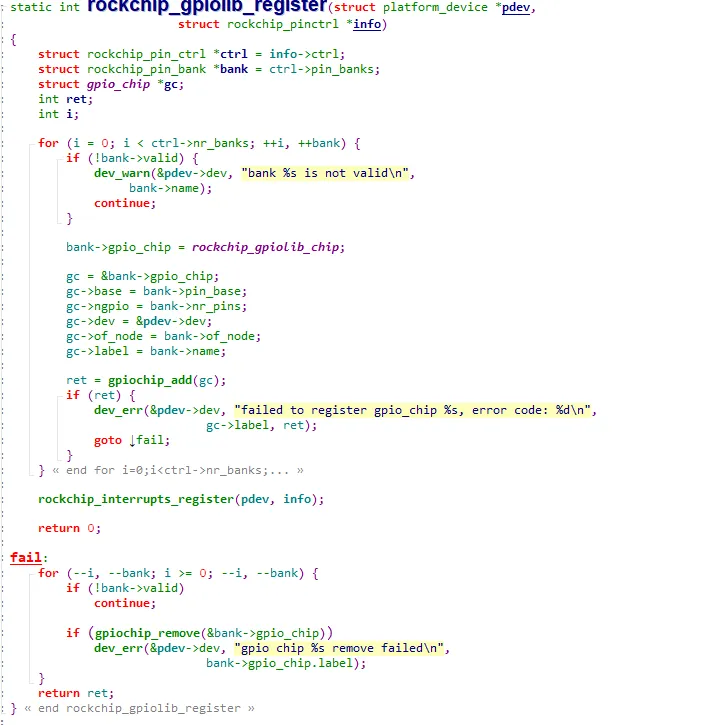
tatic introckchip_pinctrl_probe(struct platform_device *pdev)struct rockchip_pinctrl *info;struct device *dev = &pdev->dev;struct rockchip_pin_ctrl *ctrl;struct device_node *np = pdev->dev.of_node, *node;struct resource *res;void __iomem *base;|--info = devm_kzalloc(dev, sizeof(struct rockchip_pinctrl), GFP_KERNEL); //分配一个结构体空间|--ctrl = rockchip_pinctrl_get_soc_data(info, pdev); //获取芯片的pin信息 获取gpio bank的地址|--match = of_match_node(rockchip_pinctrl_dt_match, node);|--ctrl = (struct rockchip_pin_ctrl *)match->data; //这里.data = (void *)&rk3288_pin_ctrl|---rockchip_regmap_config.max_register = resource_size(res) - 4;rockchip_regmap_config.name = "rockchip,pinctrl";info->regmap_base = devm_regmap_init_mmio(&pdev->dev, base, &rockchip_regmap_config)|--ret = rockchip_gpiolib_register(pdev, info);这个是注册gpio chip 以及中断
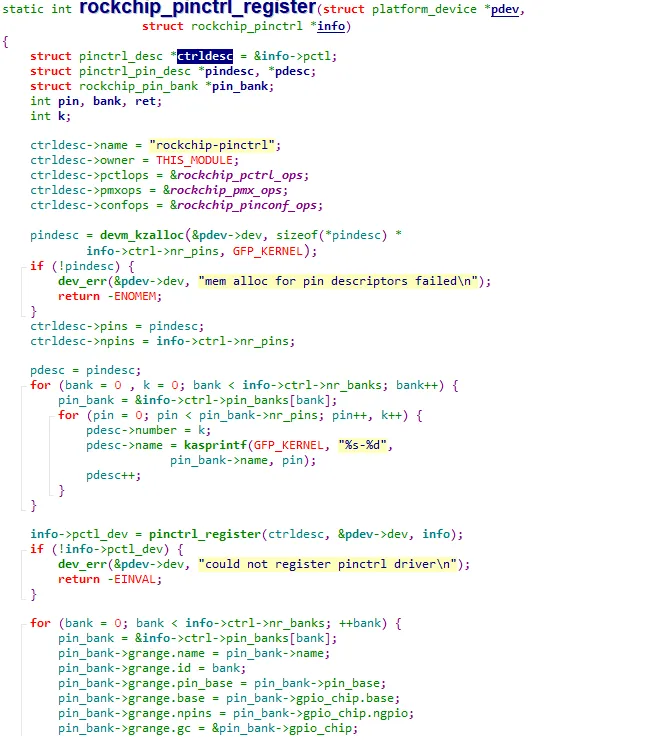
|--ret = rockchip_pinctrl_register(pdev, info);该函数如下
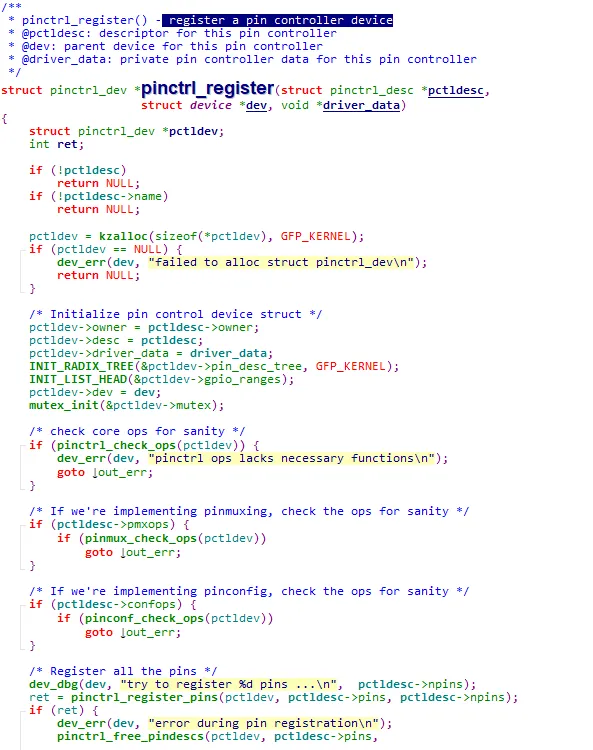
其中info->pctl_dev = pinctrl_register(ctrldesc, &pdev->dev, info);向内核注册pinctrl,产生pinctrl_dev,该函数位于kernel\drivers\pinctrl\core.c, register a pin controller device描述一个引脚的结构体 struct pinctrl_pin_desc:
struct pinctrl_pin_desc { unsigned number; const char *name; void *drv_data;};
具体使用
第一种情况
如果你发现dts中的pinctrl 标注错误需要修改或者需要对某一个gpio设置电气属性,可以在你的dts 中重写
&pinctrl { //used for init some gpio init-gpios = <&gpio8 GPIO_A0 GPIO_ACTIVE_HIGH// &gpio7 GPIO_B1 GPIO_ACTIVE_HIGH &gpio4 GPIO_B0 GPIO_ACTIVE_HIGH>; gpio0_gpio { gpio0_c2: gpio0-c2 { rockchip,pins = <GPIO0_C2>; rockchip,pull = <VALUE_PULL_DOWN>;//设置下拉 }; //to add }; gpio7_gpio { gpio7_b7: gpio7-b7 { rockchip,pins = <GPIO7_B7>; rockchip,pull = <VALUE_PULL_UP>;//设置上拉 }; //to add };};
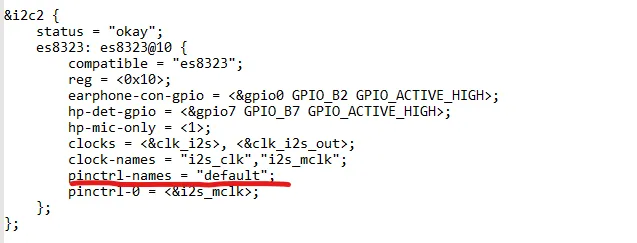
第二种情况pinctrl-names 使用
&i2c2 { status = "okay"; es8323: es8323@10 { compatible = "es8323"; reg = <0x10>; earphone-con-gpio = <&gpio0 GPIO_B2 GPIO_ACTIVE_HIGH>; hp-det-gpio = <&gpio7 GPIO_B7 GPIO_ACTIVE_HIGH>; hp-mic-only = <1>; clocks = <&clk_i2s>, <&clk_i2s_out>; clock-names = "i2s_clk","i2s_mclk"; pinctrl-names = "default"; pinctrl-0 = <&i2s_mclk>; };};
pinctrl-names = "default"; 不仅仅定义 默认状态(default)还有复位状态(reset)。
比如设备树配置中:
pinctrl-names = "default", "reset";pinctrl-0 = <&mac0_rmii_p0_normal>, <&mac0_rmii_p1_normal>;pinctrl-1 = <&mac0_rmii_p0_rst>, <&mac0_rmii_p1_normal>;
"default": 默认状态,通常用于设备正常操作时的引脚配置
"reset": 复位状态,通常用于设备复位或低功耗模式时的引脚配置
pinctrl-0 (对应 "default" 状态):
使用 mac0_rmii_p0_normal 和 mac0_rmii_p1_normal 配置
这表示在正常操作模式下,MAC0 的 RMII 接口使用正常引脚配置
pinctrl-1 (对应 "reset" 状态):
使用 mac0_rmii_p0_rst 和 mac0_rmii_p1_normal 配置
这表示在复位状态下,MAC0 的 RMII 接口部分引脚使用复位配置,部分保持正常
这种需要看对应的驱动代码
驱动代码如何解析 pinctrl-names
Linux 内核中的 pinctrl 子系统提供了 API 来解析和使用这些配置。以下是驱动代码中典型的处理方式:
1. 包含必要的头文件
#include<linux/pinctrl/consumer.h>
2. 定义 pinctrl 状态指针
struct pinctrl *pinctrl; struct pinctrl_state *default_state; struct pinctrl_state *reset_state;
3. 在 probe 函数中获取和配置 pinctrl
static int my_driver_probe(struct platform_device *pdev){ int ret; // 获取 pinctrl pinctrl = devm_pinctrl_get(&pdev->dev); if (IS_ERR(pinctrl)) { dev_err(&pdev->dev, "Failed to get pinctrl\n"); return PTR_ERR(pinctrl); } // 获取默认状态 default_state = pinctrl_lookup_state(pinctrl, "default"); if (IS_ERR(default_state)) { dev_err(&pdev->dev, "Failed to get default state\n"); return PTR_ERR(default_state); } // 获取复位状态 reset_state = pinctrl_lookup_state(pinctrl, "reset"); if (IS_ERR(reset_state)) { dev_err(&pdev->dev, "Failed to get reset state\n"); return PTR_ERR(reset_state); } // 应用默认状态 ret = pinctrl_select_state(pinctrl, default_state); if (ret < 0) { dev_err(&pdev->dev, "Failed to apply default state\n"); return ret; } // 其他初始化代码... return 0;}
4. 在需要时切换状态
// 切换到复位状态
int ret = pinctrl_select_state(pinctrl, reset_state);if (ret < 0) { dev_err(dev, "Failed to apply reset state\n"); return ret;}// 执行复位操作...
// 切换回默认状态
ret = pinctrl_select_state(pinctrl, default_state);if (ret < 0) { dev_err(dev, "Failed to apply default state\n"); return ret;}
5. 在 remove 或 shutdown 函数中清理
staticintmy_driver_remove(struct platform_device *pdev) { // 可选:切换到复位状态 pinctrl_select_state(pinctrl, reset_state); // 释放 pinctrl devm_pinctrl_put(pinctrl); return 0; }
状态切换的实际应用
在驱动中,您可以根据设备的不同操作模式切换引脚状态:
设备挂起或进入低功耗模式时: 应用 "reset" 状态或其他低功耗状态设备恢复时: 重新应用 "default" 状态
设备复位时: 先应用 "reset" 状态,然后重新应用 "default" 状态
注意事项
状态名称的一致性:设备树中的 pinctrl-names 必须与驱动代码中查找的状态名称一致;
错误处理: 必须检查每个 pinctrl 操作的返回值,确保状态切换成功;
资源管理: 使用 devm_pinctrl_get() 和 devm_pinctrl_put() 可以自动管理资源生命周期;
并发访问: 确保在状态切换时没有其他操作正在使用相关引脚。
高级用法
对于更复杂的场景,您可以定义更多状态并在驱动中动态切换:
pinctrl-names = "default", "reset", "sleep", "high_speed"; pinctrl-0 = <&normal_config>; pinctrl-1 = <&reset_config>; pinctrl-2 = <&sleep_config>;pinctrl-3 = <&high_speed_config>;
在驱动中,您可以根据设备的工作状态(如数据传输速率、功耗模式等)动态选择合适的引脚配置。
通过合理使用 pinctrl 子系统,您可以灵活管理设备的引脚配置,优化性能和功耗,同时确保在不同操作模式下引脚行为的正确性。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
