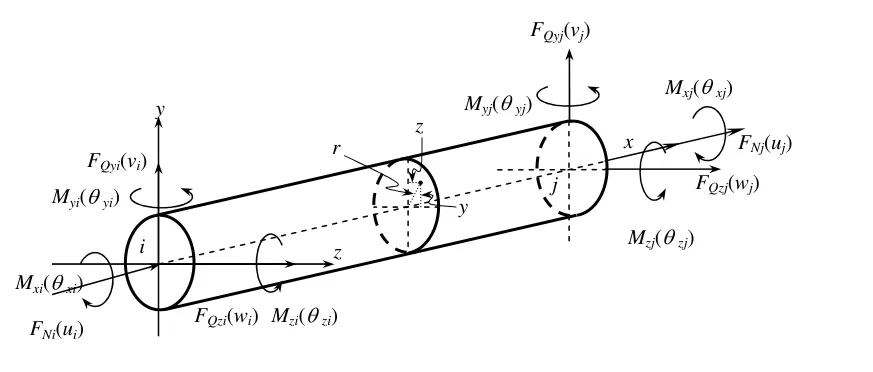
一般情况下,梁单元每个结点的位移具有6个自由度,它对应于6个结点力。在系统中取出结点为i和j的梁单元,如图1所示。取右手坐标系,x轴为单元轴线方向,而y轴和z轴为截面的主惯性轴。
▲图1
三维梁单元的内力是基于杆的位置的函数,由一系列的离散点组成矩阵
在画某一单元的变形或内力图时,通常是以该单元起点为总体坐标系的坐标原点,杆轴沿着总体坐标系的轴正方向,杆轴上的离散点便是矩阵A的第一行,离散点对应的函数值便是矩阵A的第二行。这是默认图形在面上,如果将图形画在面上,矩阵A的第二行全为0
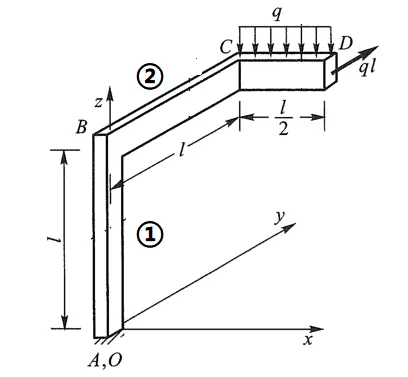
▲图2
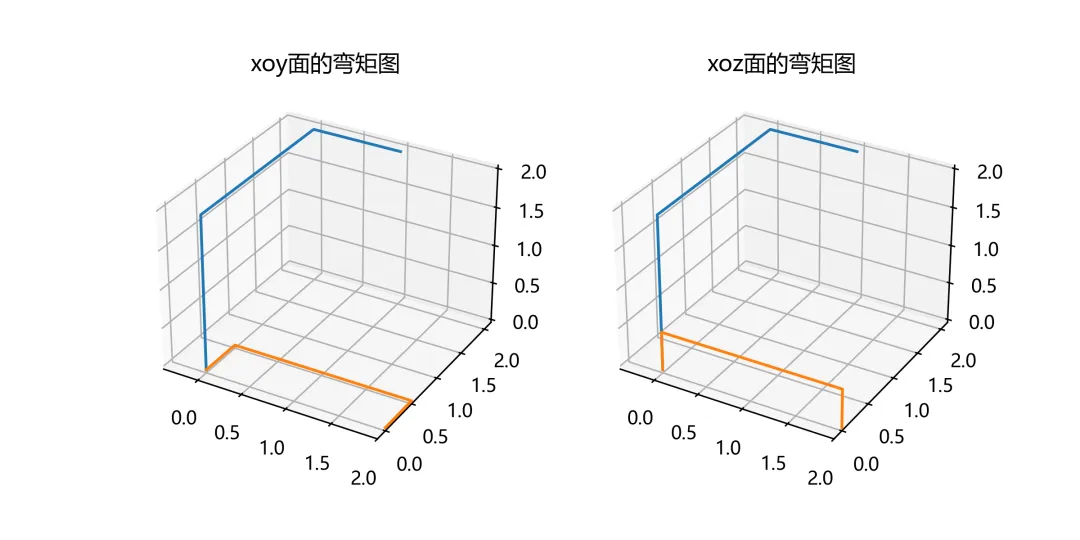
用python演示图2的框架,在初始位置不同的平面内的弯矩图
import matplotlib.pyplot as pltimport numpy as npdefmain(): plt.rcParams['font.sans-serif'] = ['Microsoft YaHei'] # 这个字体能够支持中英文字符 plt.rcParams['axes.unicode_minus'] = False# 正常显示负号# 三维框架 xs = [0,0,0,1] ys = [0,0,2,2] zs = [0,2,2,2] xx = np.linspace(0, 2, 10) # 梁单元划分为10个小段# 每一个离散点的弯矩值 m = [0.5,0.5, 0.5, 0.5, 0.5,0.5,0.5, 0.5, 0.5, 0.5] xx1 = np.hstack( (xx[0], xx, xx[-1]) ) m1 = np.hstack( (xx[0],m, xx[0]) ) zeros = np.zeros(12)# 图形在xoy面,故第三行全为0 A = np.vstack( ( xx1, m1, zeros) )# 图形在xoz面,故第二行全为0 A1 = np.vstack( ( xx1, zeros, m1) ) fig, axs = plt.subplots(nrows=1, ncols=2, sharex=True, figsize=(8, 4),subplot_kw={"projection": "3d"})# 绘制刚架图 axs[0].plot(xs, ys, zs)# 绘制单元1在xoy面的弯矩图 axs[0].plot( A[0,:],A[1,:],A[2,:]) axs[0].set( title='xoy面的弯矩图') axs[0].set_xlim(-0.4, 2)# 绘制单元1在xoz面的弯矩图 axs[1].plot(xs, ys, zs) axs[1].plot(A1[0,:], A1[1,:], A1[2,:] ) axs[1].set( title='xoz面的弯矩图') axs[1].set_xlim(-0.4, 2) fig.savefig("z216.png",dpi=300) plt.show()if __name__ == "__main__": main()
▲图3
内力图要经过旋转、平移操作,使之回到对应的位置上去,即图形与局部坐标一致。对于图1中的单元1,则需要作两次旋转操作(RA),而单元2则需要作旋转平移操作(TA)。缩放操作则根据图形是否协调适当考虑。下面动手画图2中的各单元扭矩图(绕单元轴线的弯矩)
单元1的两次旋转操作
import matplotlib.pyplot as pltimport numpy as npdefmain(): plt.rcParams['font.sans-serif'] = ['Microsoft YaHei'] # 这个字体能够支持中英文字符 plt.rcParams['axes.unicode_minus'] = False# 正常显示负号# 三维框架 xs = [0,0,0,1] ys = [0,0,2,2] zs = [0,2,2,2] xx = np.linspace(0, 2, 10) # 梁单元划分为10个小段# 每一个离散点的弯矩值 m = [0.5,0.5, 0.5, 0.5, 0.5,0.5,0.5, 0.5, 0.5, 0.5] xx1 = np.hstack( (xx[0], xx, xx[-1]) ) m1 = np.hstack( (xx[0],m, xx[0]) ) ones = np.ones(12) zeros = np.zeros(12)# 矩阵A增加维度,即第四行全为1,图形在xoz面,故第二行全为0 A = np.vstack( ( xx1, zeros, m1, ones) )# z轴旋转矩阵 Rz = np.array([[0, -1, 0, 0], [1, 0, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1] ])# x轴旋转矩阵 Rx = np.array([[1, 0, 0, 0], [0, 0, -1, 0], [0, 1, 0, 0], [0, 0, 0, 1] ])# 旋转变换 Rxyz = Rz @ A Rxyz1 = Rx @ Rxyz fig, axs = plt.subplots(nrows=2, ncols=2, sharex=True, figsize=(8, 8),subplot_kw={"projection": "3d"})# 绘制刚架图 axs[0,0].plot(xs, ys, zs)# 绘制单元1未旋转时的弯矩图 axs[0,0].plot( xx1,zeros,m1) axs[0,0].set( title='旋转前的弯矩图') axs[0,0].set_xlim(-0.4, 2)# 绘制单元1绕z轴旋转后的弯矩图 axs[0,1].plot(xs, ys, zs) axs[0,1].plot(Rxyz[0,:], Rxyz[1,:], Rxyz[2,:] ) axs[0,1].set( title='绕Z轴旋转后的弯矩图') axs[0,1].set_xlim(-0.4, 2)# 绘制单元1绕x轴旋转后的弯矩图 axs[1,0].plot(xs, ys, zs) axs[1,0].plot(Rxyz1[0,:], Rxyz1[1,:], Rxyz1[2,:] ) axs[1,0].set( title='绕X轴旋转后的弯矩图') axs[1,0].set_xlim(-0.4, 2) fig.savefig("z211.png",dpi=300) plt.show()if __name__ == "__main__": main()
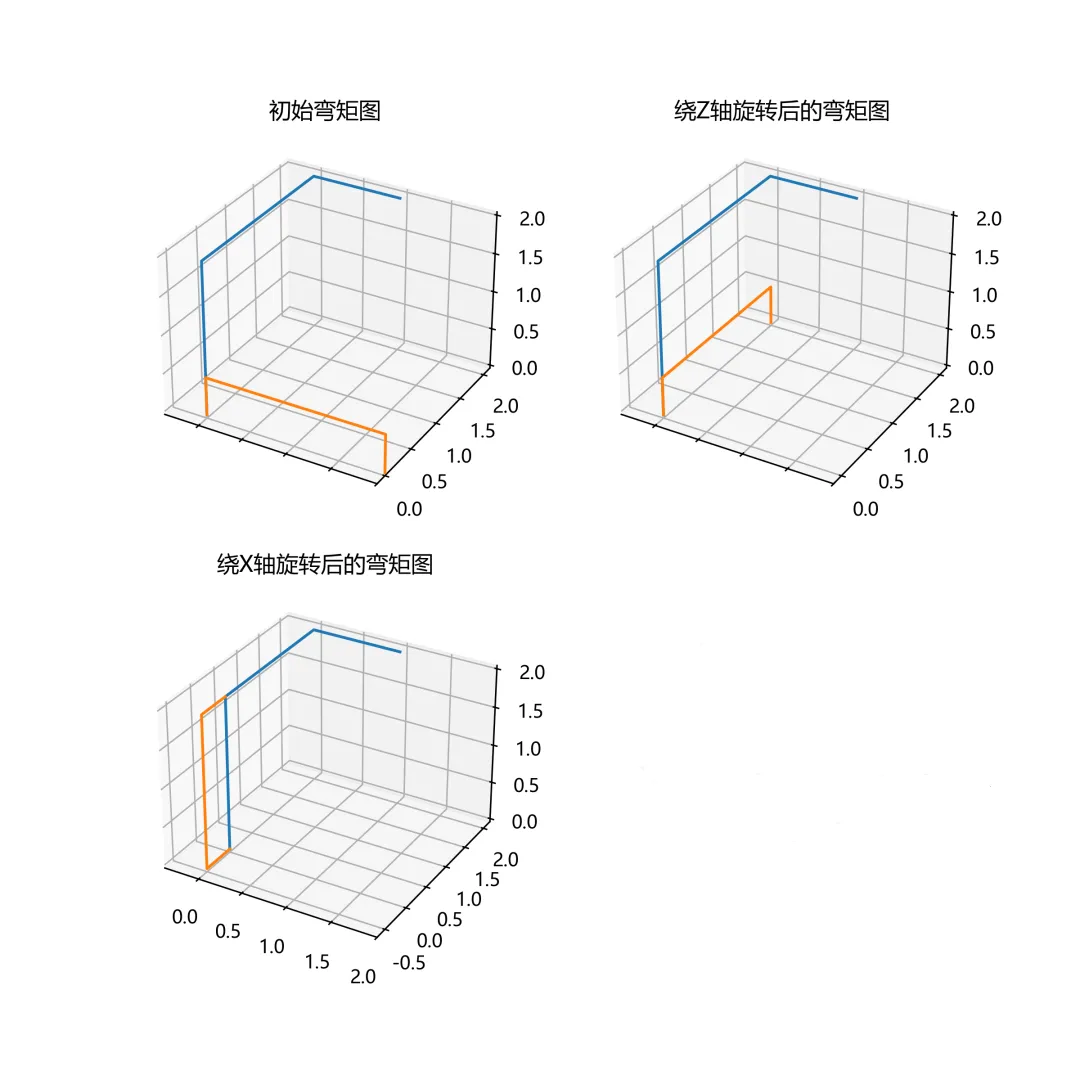
▲图4
单元2的旋转平移操作
import matplotlib.pyplot as pltimport numpy as npdefmain(): plt.rcParams['font.sans-serif'] = ['Microsoft YaHei'] # 这个字体能够支持中英文字符 plt.rcParams['axes.unicode_minus'] = False# 正常显示负号# 三维框架 xs = [0,0,0,1] ys = [0,0,2,2] zs = [0,2,2,2] xx = np.linspace(0, 2, 10) # 梁单元划分为10个小段# 每一个离散点的弯矩值 m = [0.5,0.5, 0.5, 0.5, 0.5,0.5,0.5, 0.5, 0.5, 0.5] xx1 = np.hstack( (xx[0], xx, xx[-1]) ) m1 = np.hstack( (xx[0],m, xx[0]) ) ones = np.ones(12) zeros = np.zeros(12)# 矩阵A增加维度,即第四行全为1.图形在xoz面,故第二行全为0 A = np.vstack( ( xx1,zeros,m1, ones) )# z轴旋转矩阵 Rz = np.array([[0, -1, 0, 0], [1, 0, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1] ])# 平移矩阵 T = np.array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 2], [0, 0, 0, 1] ])# 旋转平移变换 Rxyz = Rz @ A Rxyz1 = T @ Rxyz fig, axs = plt.subplots(nrows=2, ncols=2, sharex=True, figsize=(8, 8),subplot_kw={"projection": "3d"})# 绘制刚架图 axs[0,0].plot(xs, ys, zs)# 绘制单元2未旋转时的弯矩图 axs[0,0].plot( xx1,zeros,m1) axs[0,0].set( title='旋转前的弯矩图') axs[0,0].set_xlim(-0.4, 2)# 绘制单元2旋转后的弯矩图 axs[0,1].plot(xs, ys, zs) axs[0,1].plot(Rxyz[0,:], Rxyz[1,:], Rxyz[2,:] ) axs[0,1].set( title='旋转后的弯矩图') axs[0,1].set_xlim(-0.4, 2)# 绘制单元2平移后的弯矩图 axs[1,0].plot(xs, ys, zs) axs[1,0].plot(Rxyz1[0,:], Rxyz1[1,:], Rxyz1[2,:] ) axs[1,0].set( title='平移后的弯矩图') axs[1,0].set_xlim(-0.4, 2) fig.savefig("z22.png",dpi=300) plt.show()if __name__ == "__main__": main()
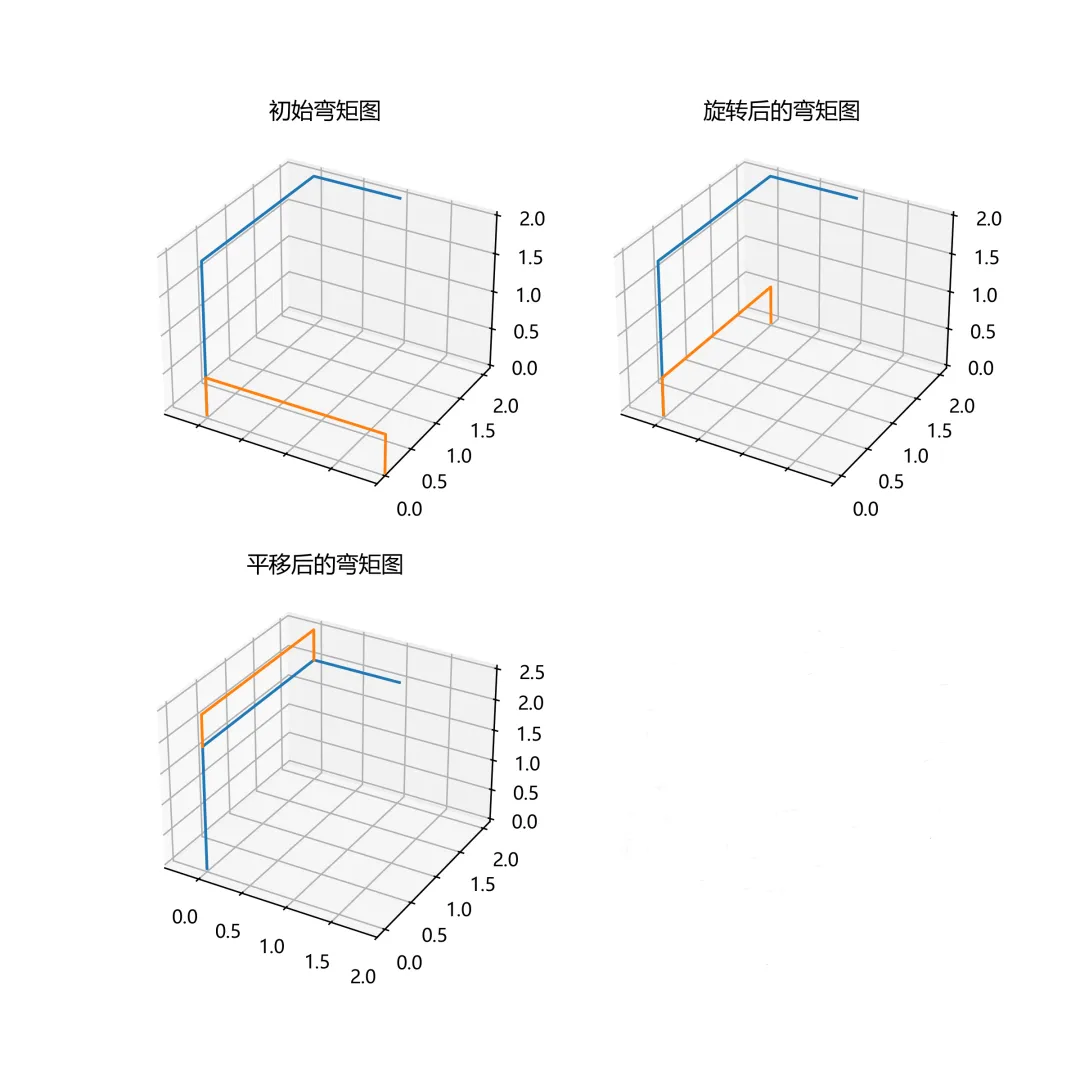
▲图5
实际上,扭矩图和轴力图一样,图形位置都可以自行定义。
附录:
三维空间中绕轴旋转的旋转矩阵分别为
平移矩阵为
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
